Accelerating Embedded Software Processing in an FPGA with Powerpc and Microblaze
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ASIC Implemented Microblaze-Based Coprocessor for Data Stream
ASIC-IMPLEMENTED MICROBLAZE-BASED COPROCESSOR FOR DATA STREAM MANAGEMENT SYSTEMS A Thesis Submitted to the Faculty of Purdue University by Linknath Surya Balasubramanian In Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical and Computer Engineering May 2020 Purdue University Indianapolis, Indiana ii THE PURDUE UNIVERSITY GRADUATE SCHOOL STATEMENT OF THESIS APPROVAL Dr. John J. Lee, Chair Department of Electrical and Computer Engineering Dr. Lauren A. Christopher Department of Electrical and Computer Engineering Dr. Maher E. Rizkalla Department of Electrical and Computer Engineering Approved by: Dr. Brian King Head of Graduate Program iii ACKNOWLEDGMENTS I would first like to express my gratitude to my advisor Dr. John J. Lee and my thesis committee members Dr. Lauren A. Christopher and Dr. Maher E. Rizkalla for their patience, guidance, and support during this journey. I would also like to thank Mrs. Sherrie Tucker for her patience, help, and encouragement. Lastly, I must thank Dr. Pranav Vaidya and Mr. Tareq S. Alqaisi for all their support, technical guidance, and advice. Thank you all for taking time and helping me complete this study. iv TABLE OF CONTENTS Page LIST OF TABLES :::::::::::::::::::::::::::::::::: vi LIST OF FIGURES ::::::::::::::::::::::::::::::::: vii ABSTRACT ::::::::::::::::::::::::::::::::::::: ix 1 INTRODUCTION :::::::::::::::::::::::::::::::: 1 1.1 Previous Work ::::::::::::::::::::::::::::::: 1 1.2 Motivation :::::::::::::::::::::::::::::::::: 2 1.3 Thesis Outline :::::::::::::::::::::::::::::::: -
A Soft Processor Microblaze-Based Embedded System for Cardiac Monitoring
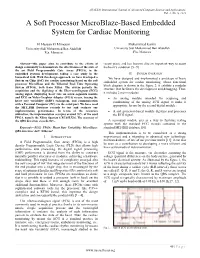
(IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 4, No. 9, 2013 A Soft Processor MicroBlaze-Based Embedded System for Cardiac Monitoring El Hassan El Mimouni Mohammed Karim University Sidi Mohammed Ben Abdellah University Sidi Mohammed Ben Abdellah Fès, Morocco Fès, Morocco Abstract—this paper aims to contribute to the efforts of recent years, and has become also an important way to assert design community to demonstrate the effectiveness of the state of the heart’s condition [5 - 9]. the art Field Programmable Gate Array (FPGA), in the embedded systems development, taking a case study in the II. SYSTEM OVERVIEW biomedical field. With this design approach, we have developed a We have designed and implemented a prototype of basic System on Chip (SoC) for cardiac monitoring based on the soft embedded system for cardiac monitoring, whose functional processor MicroBlaze and the Xilkernel Real Time Operating block diagram is shown in the figure 2; it exhibits a modular System (RTOS), both from Xilinx. The system permits the structure that facilitates the development and debugging. Thus, acquisition and the digitizing of the Electrocardiogram (ECG) analog signal, displaying heart rate on seven segments module it includes 2 main modules: and ECG on Video Graphics Adapter (VGA) screen, tracing the An analog module intended for acquiring and heart rate variability (HRV) tachogram, and communication conditioning of the analog ECG signal to make it with a Personal Computer (PC) via the serial port. We have used appropriate for use by the second digital module ; the MIT_BIH Database records to test and evaluate our implementation performance. -

Performance Evaluation of FPGA Based Embedded ARM Processor
10.1109/ULTSYM.2013.0135 Performance Evaluation of FPGA based Embedded ARM Processor for Ultrasonic Imaging Spenser Gilliland, Pramod Govindan, Thomas Gonnot and Jafar Saniie Department of Electrical and Computer Engineering Illinois Institute of Technology, Chicago IL, U.S.A. Abstract- This study evaluates the performance of an FPGA based embedded ARM processor system to implement signal processing for ultrasonic imaging and nondestructive testing applications. FPGA based embedded processors possess many advantages including a reduced overall development time, increased performance, and the ability to perform hardware- software (HW/SW) co-design. This study examines the execution performance of split spectrum processing, chirplet signal decomposition, Wigner-Ville distributions and short time Fourier transform implementations, on two embedded processing platforms: a Xilinx Virtex-5 FPGA with embedded MicroBlaze processor and a Xilinx Zynq FPGA with embedded ARM processor. Overall, the Xilinx Zynq FPGA significantly outperforms the Virtex-5 based system in software applications I. INTRODUCTION Figure 1. RUSH SoC setup Generally, ultrasonic imaging applications use personal computers or hand held devices. As these devices are not frequency diverse flaw detection [1], parametric echo specifically designed for efficiently executing estimation [2], and joint time-frequency distribution [3]) on computationally intensive ultrasonic signal processing the RUSH platform using a Xilinx Virtex-5 FPGA with an algorithms, the performance of these applications can be embedded soft-core MicroBlaze processor [4,5] and a improved by executing the algorithms using a dedicated Xilinx Zynq 7020 FPGA with an embedded ARM processor embedded system-on-chip (SoC) hardware. However, [6,7] as shown in Figure 2. porting these applications onto an embedded system requires deep knowledge of the processor architecture and RUSH embedded software development tools. -

Evaluation of Synthesizable CPU Cores
Evaluation of synthesizable CPU cores DANIEL MATTSSON MARCUS CHRISTENSSON Maste r ' s Thesis Com p u t e r Science an d Eng i n ee r i n g Pro g r a m CHALMERS UNIVERSITY OF TECHNOLOGY Depart men t of Computer Engineering Gothe n bu r g 20 0 4 All rights reserved. This publication is protected by law in accordance with “Lagen om Upphovsrätt, 1960:729”. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior permission of the authors. Daniel Mattsson and Marcus Christensson, Gothenburg 2004. Evaluation of synthesizable CPU cores Abstract The three synthesizable processors: LEON2 from Gaisler Research, MicroBlaze from Xilinx, and OpenRISC 1200 from OpenCores are evaluated and discussed. Performance in terms of benchmark results and area resource usage is measured. Different aspects like usability and configurability are also reviewed. Three configurations for each of the processors are defined and evaluated: the comparable configuration, the performance optimized configuration and the area optimized configuration. For each of the configurations three benchmarks are executed: the Dhrystone 2.1 benchmark, the Stanford benchmark suite and a typical control application run as a benchmark. A detailed analysis of the three processors and their development tools is presented. The three benchmarks are described and motivated. Conclusions and results in terms of benchmark results, performance per clock cycle and performance per area unit are discussed and presented. Sammanfattning De tre syntetiserbara processorerna: LEON2 från Gaisler Research, MicroBlaze från Xilinx och OpenRISC 1200 från OpenCores utvärderas och diskuteras. -

An Evaluation of Soft Processors As a Reliable Computing Platform
Brigham Young University BYU ScholarsArchive Theses and Dissertations 2015-07-01 An Evaluation of Soft Processors as a Reliable Computing Platform Michael Robert Gardiner Brigham Young University - Provo Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Electrical and Computer Engineering Commons BYU ScholarsArchive Citation Gardiner, Michael Robert, "An Evaluation of Soft Processors as a Reliable Computing Platform" (2015). Theses and Dissertations. 5509. https://scholarsarchive.byu.edu/etd/5509 This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. An Evaluation of Soft Processors as a Reliable Computing Platform Michael Robert Gardiner A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of Science Michael J. Wirthlin, Chair Brad L. Hutchings Brent E. Nelson Department of Electrical and Computer Engineering Brigham Young University July 2015 Copyright © 2015 Michael Robert Gardiner All Rights Reserved ABSTRACT An Evaluation of Soft Processors as a Reliable Computing Platform Michael Robert Gardiner Department of Electrical and Computer Engineering, BYU Master of Science This study evaluates the benefits and limitations of soft processors operating in a radiation-hardened FPGA, focusing primarily on the performance and reliability of these systems. FPGAs designs for four popular soft processors, the MicroBlaze, LEON3, Cortex- M0 DesignStart, and OpenRISC 1200 are developed for a Virtex-5 FPGA. The performance of these soft processor designs is then compared on ten widely-used benchmark programs. -

Korea Tech Conference
-Merging of Linux/uClinux 2.6 & the Benchmark- Korea Tech Conference 2005년 5월 14일, 서울 2005년 5월 14일 CE Linux Forum Korea Tech Conference 1 -Merging of Linux/uClinux 2.6 & the Benchmark- Merging of Linux/uClinux 2.6 & the Benchmark Hyok S. Choi (최혁승) Linux Kernel armnommu maintainer Digital Media R&D Center Samsung Electronics Co.,Ltd. 2005년 5월 14일 CE Linux Forum Korea Tech Conference 2 -Merging of Linux/uClinux 2.6 & the Benchmark- Contents • Introduction of uClinux • Introduction of Linux 2.6 for MMU-less ARM Project • Recent Changes of ARM Linux Kernel • The Benchmark • What’s the next? 2005년 5월 14일 CE Linux Forum Korea Tech Conference 3 -Merging of Linux/uClinux 2.6 & the Benchmark- Introduction of uClinux(1/2) • What is uClinux? – A Linux derivative which is independent from the H/W supported Paging Management of MMU. – The first uClinux - 1998, Linux 2.0 – Currently, under merging state into the mainline kernel 2.6. (m68knommu, v850, h8300 is done) – Supported Architectures : • Motorola M68K/ColdFire, ARM 7/9/10/11, Intel i960, Sun SPARC, ADI BlackFin, Axis Etrax, PRISMA, Atari 68k, Xilinx Microblaze, NEC v850, Hitachi H8 – Market and Devices : • Gateways, VoIP phones, Blutooth devices, web-cams, Auto Vehicle Locators, Security Appliances, Handhelds 2005년 5월 14일 CE Linux Forum Korea Tech Conference 4 -Merging of Linux/uClinux 2.6 & the Benchmark- Introduction of uClinux(2/2) “The one of the most used Linux distribution in real embedded systems on commercial product.” • Snapshot of the Embedded Linux market -- March, 2004 , linuxdevices.com -
RTEMS Development Roadmap
OAR RTEMS Roadmap 2012 Joel Sherrill, Ph.D. OAR Corporation September 2012 OAR RTEMS in a Nutshell • RTEMS is an embedded real-time O/S – deterministic performance and resource usage • RTEMS is free software – no restrictions or obligations placed on fielded applications • Supports open standards like POSIX • Available for 15+ CPU families and 150+ BSPs • Training and support services available http://www.rtems.org 2 OAR RTEMS Applications BMW Superbike Avenger Curiosity Solar Dynamics Observatory ARTEMIS Galileo IOV DAWN MRO/Electra Milkymist Avenger Planck TECHNIC 1 LISA ST-5 Pathfinder Proba-2 Herschel http://www.rtems.org Images Credit: NASA and ESA 3 OAR Outline of Remainder • Community Driven Focus • Development Activities • Wish List for Future Improvements • Active Release Branch Updates • OAR Support Subscriptions & Legacy Releases • Conclusion http://www.rtems.org 4 OAR Community Driven Focus • Without users, project has no reason to exist! • Users drive requirements – Please let us know what you need • Users provide or fund many improvements – Again those reflect your requirements • Most bug reports are from users RTEMS Evolves to Meet Your Needs http://www.rtems.org 5 RTEMS Project Participation In OAR Student Programs • Google Summer of Code (2008-2012) – Almost 40 students over the five years • Google Code-In (2010-2011) – High school students did ~200 tasks for RTEMS – Included only twenty FOSS projects • ESA Summer of Code In Space (2011-2012) – Small program with only twenty FOSS projects involved http://www.rtems.org -

In Using the GNU Compiler Collection (GCC)
Using the GNU Compiler Collection For gcc version 6.1.0 (GCC) Richard M. Stallman and the GCC Developer Community Published by: GNU Press Website: http://www.gnupress.org a division of the General: [email protected] Free Software Foundation Orders: [email protected] 51 Franklin Street, Fifth Floor Tel 617-542-5942 Boston, MA 02110-1301 USA Fax 617-542-2652 Last printed October 2003 for GCC 3.3.1. Printed copies are available for $45 each. Copyright c 1988-2016 Free Software Foundation, Inc. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.3 or any later version published by the Free Software Foundation; with the Invariant Sections being \Funding Free Software", the Front-Cover Texts being (a) (see below), and with the Back-Cover Texts being (b) (see below). A copy of the license is included in the section entitled \GNU Free Documentation License". (a) The FSF's Front-Cover Text is: A GNU Manual (b) The FSF's Back-Cover Text is: You have freedom to copy and modify this GNU Manual, like GNU software. Copies published by the Free Software Foundation raise funds for GNU development. i Short Contents Introduction ::::::::::::::::::::::::::::::::::::::::::::: 1 1 Programming Languages Supported by GCC ::::::::::::::: 3 2 Language Standards Supported by GCC :::::::::::::::::: 5 3 GCC Command Options ::::::::::::::::::::::::::::::: 9 4 C Implementation-Defined Behavior :::::::::::::::::::: 373 5 C++ Implementation-Defined Behavior ::::::::::::::::: 381 6 Extensions to -

LECTURE-5 Features of Zynq Microblaze Processor Microblaze Is
LECTURE-5 Features of Zynq MicroBlaze Processor MicroBlaze is the principal soft processor type and is supported within both the Xilinx ISE and Vivado design flows, including the most recent releases. Multiple MicroBlaze instances can be deployed on a single device, if desired. There is no implied licensing cost of using MicroBlaze processors in system designs, commercially or otherwise. One of the benefits of using a soft-processor is that its configuration is flexible. The MicroBlaze has a number of different architectural options which can be included or excluded from the processor implementation depending on the requirements of the target application. For example, the FPU can be excluded if the system does not call for floating point computation, thus reducing the footprint of the processor implementation on the FPGA (i.e. the amount of resources it requires). In a more general sense, the configuration of the MicroBlaze can be customised to optimise for operating frequency, performance, or area; alternatively, it can be specified such that a suitable balance between these three metrics is achieved. This is done very easily in Vivado using a configuration wizard. MicroBlaze resource utilisation varies with configuration, starting at approximately 900 LUTs, 700 FFs, and 2 Block RAMs for the ‘minimum area’ option, and rising to about 3800 LUTs, 3200 FFs, 6 DSP48E1s and 21 Block RAMs for the ‘maximum performance’ configuration. 1 Figure 5-1 Floorplans of ‘minimum area’ (top) and ‘maximum performance’ (bottom) MicroBlaze soft processor implementation The closest MicroBlaze equivalent to the (dual-core) ARM Cortex-A9 processor would comprise two MicroBlaze instances. -

FPGA Processors
Power Matters.TM Mi-V RISC-V Ecosystem © 2018 Microsemi Corporation. Company Proprietary 1 Agenda . RISC-V Primer . Mi-V Ecosystem • RISC-V Soft Processor Offerings • Tools • Debug • Benchmarks • Kits . Mi-V Ecosystem for Linux • Unleashed Expansion • Demo Machine Learning . Summary © 2018 Microsemi Corporation. Company Proprietary Power Matters.TM 2 What is RISC-V? . A new, free, and open ISA developed at UC Berkeley • Using a permissible BSD license . ISA is designed for • Simplicity: <50 instructions required to run Linux • Longevity: standardized instructions are fixed—your code runs forever . RISC-V foundation set up to • Protect the ISA • Foster adoption . RISC-V is not an open-source processor • Although open-source implementations will exist • Provides everyone an “architectural” license to innovate © 2018 Microsemi Corporation. Company Proprietary Power Matters.TM 3 RISC-V Working Groups/Chairs . Base ISA Ratification—Berkeley . Bit Manipulation—AMD . Compliance—Microsemi/Codasip . Debug—SiFive . Formal Spec—Bluespec . Memory Model—NVIDIA, MIT . Opcode Space Management—Berkeley . Privilege Spec—SiFive . SW Tool Chain—BAE . Vector Extensions—Berkeley, Esperanto Technologies . Security—Nvidia Bold = Microsemi Participation © 2018 Microsemi Corporation. Company Proprietary Power Matters.TM 4 Why RISC-V for Soft CPUs? . Open-source ISA • Freedom to innovate at the micro-architectural level • Allows for RTL inspection—trust and certifications • Backed by industry leaders . Longevity • Fixed ISA for long-term code portability • Easy -

Microblaze RISC 32-Bit Soft Processor
0 R MicroBlaze™ RISC 32-Bit Soft Processor August 21, 2002 00Product Brief Features LogiCORE™ Facts • Supports Virtex, Virtex-E, Virtex-II Pro, Spartan-II, and Core Specifics Spartan-IIE devices • Performance: 102 Dhrystone MIPS (D-MIPS) on Special Features Up to102 D-MIPS at 150 MHz Virtex-II Pro device at 150 MHz Provided With Core • Minimum logic requirements: 900 logic cells Embedded Software Tools Handbook Documentation • 32-bit pipelined RISC architecture and Embedded Processor IP Handbook Simulation Model Generator and Xilinx Generic • 32 x 32-bit general purpose registers Design Files Netlist Format (ngo netlist) • Implementation in Virtex-II and later devices support hardware multiply Design Tool Support • Supports Local Memory Bus (LMB) for fast access of Xilinx Xilinx ISE 5.1 on-chip BRAMs Implementation Tools • Supports IBM CoreConnect On-chip Peripheral Bus MicroBlaze GNU Debugger and (OPB) for accessing peripherals Verification Tools Xilinx Microprocessor Debug (XMD) Tools • Processor peripherals compatible with PowerPC on Virtex-II Pro Support • Complete hardware and software development tool Please contact the Xilinx Hotline for technical support. and debug solution Xilinx provides technical support for this LogiCORE Product when used as described in Product Documentation. Xilinx cannot guarantee timing, functionality, or support of product if implemented in devices not listed Performance above, or if customized beyond that allowed in the product The MicroBlaze processor is one part of an expanding array documentation, or if any changes are made in sections of design marked of processor functions that work together seamlessly to cre- as “DO NOT MODIFY”. ate the highest possible performance on a single FPGA. -

Accelerating Population Count with a Hardware Co-Processor for Microblaze
Journal of Low Power Electronics and Applications Article Accelerating Population Count with a Hardware Co-Processor for MicroBlaze Iouliia Skliarova Department of Electronics, Telecommunications and Informatics, Institute of Electronics and Informatics Engineering of Aveiro (IEETA), Campus Universitário de Santiago, University of Aveiro, 3810-193 Aveiro, Portugal; [email protected] Abstract: This paper proposes a Field-Programmable Gate Array (FPGA)-based hardware accelerator for assisting the embedded MicroBlaze soft-core processor in calculating population count. The population count is frequently required to be executed in cyber-physical systems and can be applied to large data sets, such as in the case of molecular similarity search in cheminformatics, or assisting with computations performed by binarized neural networks. The MicroBlaze instruction set architecture (ISA) does not support this operation natively, so the count has to be realized as either a sequence of native instructions (in software) or in parallel in a dedicated hardware accelerator. Different hardware accelerator architectures are analyzed and compared to one another and to implementing the population count operation in MicroBlaze. The achieved experimental results with large vector lengths (up to 217) demonstrate that the best hardware accelerator with DMA (Direct Memory Access) is ~31 times faster than the best software version running on MicroBlaze. The proposed architectures are scalable and can easily be adjusted to both smaller and bigger input vector lengths. The entire system was implemented and tested on a Nexys-4 prototyping board containing a low-cost/low- power Artix-7 FPGA. Citation: Skliarova, I. Accelerating Keywords: cyber-physical systems; computation; embedded systems; population count; hardware ac- Population Count with a Hardware celerator Co-Processor for MicroBlaze.