Digital Paleoart: Reconstruction and Restoration from Laser-Scanned Fossils Evan Matthew Boucher Theo A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

State of the Palaeoart
Palaeontologia Electronica http://palaeo-electronica.org State of the Palaeoart Mark P. Witton, Darren Naish, and John Conway The discipline of palaeoart, a branch of natural history art dedicated to the recon- struction of extinct life, is an established and important component of palaeontological science and outreach. For more than 200 years, palaeoartistry has worked closely with palaeontological science and has always been integral to the enduring popularity of prehistoric animals with the public. Indeed, the perceived value or success of such products as popular books, movies, documentaries, and museum installations can often be linked to the quality and panache of its palaeoart more than anything else. For all its significance, the palaeoart industry ment part of this dialogue in the published is often poorly treated by the academic, media and literature, in turn bringing the issues concerned to educational industries associated with it. Many wider attention. We argue that palaeoartistry is standard practises associated with palaeoart pro- both scientifically and culturally significant, and that duction are ethically and legally problematic, stifle improved working practises are required by those its scientific and cultural growth, and have a nega- involved in its production. We hope that our views tive impact on the financial viability of its creators. inspire discussion and changes sorely needed to These issues create a climate that obscures the improve the economy, quality and reputation of the many positive contributions made by palaeoartists palaeoart industry and its contributors. to science and education, while promoting and The historic, scientific and economic funding derivative, inaccurate, and sometimes exe- significance of palaeoart crable artwork. -

Visions of the Prehistoric Past Reviewed by Mark P. Witton
Palaeontologia Electronica http://palaeo-electronica.org Paleoart: Visions of the Prehistoric Past Reviewed by Mark P. Witton Paleoart: Visions of the Prehistoric Past. 2017. Written by Zoë Lescaze and Walton Ford. Taschen. 292 pages, ISBN 978-3-8365-5511-1 (English edition). € 75, £75, $100 (hardcover) Paleoart: Visions of the Prehistoric Past is a collection of palaeoartworks spanning 150 years of palaeoart history, from 1830 to the second half of the 20th century. This huge, supremely well-pre- sented book was primarily written by journalist, archaeological illustrator and art scholar Zoë Les- caze, with an introduction by artist Walton Ford (both are American, and use ‘paleoart’ over the European spelling ‘palaeoart’). Ford states that the genesis of the book reflects “the need for a paleo- art book that was more about the art and less about the paleo” (p. 12), and thus Paleoart skews towards artistic aspects of palaeoartistry rather than palaeontological theory or technical aspects of reconstructing extinct animal appearance. Ford and Lescaze are correct that this angle of palaeo- artistry remains neglected, and this puts Paleoart in prime position to make a big impact on this pop- ular, though undeniably niche subject. Paleoart is extremely well-produced and stun- ning to look at, a visual feast for anyone with an interest in classic palaeoart. 292 pages of thick, sturdy paper (9 chapters, hundreds of images, and four fold outs) and almost impractical dimensions (28 x 37.4 cm) make it a physically imposing, stately tome that reminds us why books belong on shelves and not digital devices. Focusing exclu- sively on 2D art, the layout is minimalist and clean, detail, unobscured by text and labelling. -

(PDF) Dinosaur Art: the World's Greatest Paleoart Steve White
(PDF) Dinosaur Art: The World'S Greatest Paleoart Steve White - download pdf free book pdf free download Dinosaur Art: The World's Greatest Paleoart, Free Download Dinosaur Art: The World's Greatest Paleoart Full Popular Steve White, by Steve White pdf Dinosaur Art: The World's Greatest Paleoart, full book Dinosaur Art: The World's Greatest Paleoart, Steve White epub Dinosaur Art: The World's Greatest Paleoart, PDF Dinosaur Art: The World's Greatest Paleoart Free Download, online free Dinosaur Art: The World's Greatest Paleoart, Download Dinosaur Art: The World's Greatest Paleoart PDF, Download Dinosaur Art: The World's Greatest Paleoart E-Books, Dinosaur Art: The World's Greatest Paleoart Ebooks, Free Download Dinosaur Art: The World's Greatest Paleoart Ebooks Steve White, Dinosaur Art: The World's Greatest Paleoart Ebooks, Read Dinosaur Art: The World's Greatest Paleoart Ebook Download, Download PDF Dinosaur Art: The World's Greatest Paleoart, Free Download Dinosaur Art: The World's Greatest Paleoart Full Version Steve White, Dinosaur Art: The World's Greatest Paleoart Full Download, by Steve White pdf Dinosaur Art: The World's Greatest Paleoart, Steve White ebook Dinosaur Art: The World's Greatest Paleoart, by Steve White pdf Dinosaur Art: The World's Greatest Paleoart, Read Dinosaur Art: The World's Greatest Paleoart Full Collection Steve White, CLICK FOR DOWNLOAD epub, mobi, pdf, kindle Description: The review included little on what I looked like and no word to say about how much that got in way of my head, only some mention from other readers those reading just knew who read The author was a real geek. -
Dinosaur Art Evolves with New Discoveries in Paleontology Amy Mcdermott, Science Writer
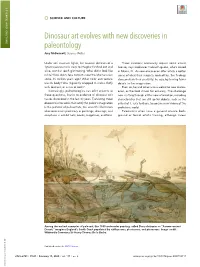
SCIENCE AND CULTURE SCIENCE AND CULTURE Dinosaur art evolves with new discoveries in paleontology Amy McDermott, Science Writer Under soft museum lights, the massive skeleton of a Those creations necessarily require some artistic Tyrannosaurus rex is easy to imagine fleshed out and license, says freelancer Gabriel Ugueto, who’s based alive, scimitar teeth glimmering. What did it look like in Miami, FL. As new discoveries offer artists a better in life? How did its face contort under the Montana sun sense of what their subjects looked like, the findings some 66 million years ago? What color and texture also constrain their creativity, he says, by leaving fewer was its body? Was it gauntly wrapped in scales, fluffy details to the imagination. with feathers, or a mix of both? Even so, he and other artists welcome new discov- Increasingly, paleontologists can offer answers to eries, as the field strives for accuracy. The challenge these questions, thanks to evidence of dinosaur soft now is sifting through all this new information, including tissues discovered in the last 30 years. Translating those characteristics that are still up for debate, such as the discoveries into works that satisfy the public’simagination extent of T. rex’s feathers, to conjure new visions of the is the purview of paleoartists, the scientific illustrators prehistoric world. who reconstruct prehistory in paintings, drawings, and Paleoartists often have a general science back- sculptures in exhibit halls, books, magazines, and films. ground or formal artistic training, although career Among the earliest examples of paleoart, this 1830 watercolor painting, called Duria Antiquior or “A more ancient Dorset,” imagines England’s South Coast populated by ichthyosaurs, plesiosaurs, and pterosaurs. -

The Paleontograph______
__________The Paleontograph________ A newsletter for those interested in all aspects of Paleontology Volume 8 Issue 1 March, 2019 _________________________________________________________________ From Your Editor Welcome to our latest edition. Happy Spring to you all. Well, we made it thru the winter pretty much okay here in CO. The weather here really is pretty nice with the "Bomb Cyclone" being the exception. I'm excited to be heading back east to the big fossil and mineral show in Edison, NJ., April 3-7. I usually run into many long time friends at this show. My booth "Lost World Fossils" is just inside the entrance. If you make it to the show, please stop by and say hello. I'm the old guy with the white beard. I have a note on the last page detailing an exciting new arrangement. We will soon have all back and future issues of The Paleontograph archived on the AAPS website. The Paleontograph was created in 2012 to continue what was originally the newsletter of The New Jersey Paleontological Society. The Paleontograph publishes articles, book reviews, personal accounts, and anything else that relates to Paleontology and fossils. Feel free to submit both technical and non-technical work. We try to appeal to a wide range of people interested in fossils. Articles about localities, specific types of fossils, fossil preparation, shows or events, museum displays, field trips, websites are all welcome. This newsletter is meant to be one by and for the readers. Issues will come out when there is enough content to fill an issue. I encourage all to submit contributions. -

LOOKING BACKWARD John Taine Was an Important Figure in Science Fiction When I Began Reading It Seven - Ty-Odd Years Ago, Though He Is Pretty Much Forgotten Today
REFLECTIONS Robert Silverberg LOOKING BACKWARD John Taine was an important figure in science fiction when I began reading it seven - ty-odd years ago, though he is pretty much forgotten today. He was in reality Eric Temple Bell, a professor of Mathematics at the California Institute of Technology, who under his own name published books on mathematical and technical subjects, and under the Taine pseudonym wrote a dozen or so superb science fiction novels, mainly in the 1920s and 1930s. When I was about twelve I encountered one of them, Before the Dawn, which dated from 1934, and it had a tremendous impact on me. The jacket of the first edition, which was published not by a regular publisher of fic - tion but by one that specialized in scientific textbooks, proclaimed it to be a novel of “TELEVISION IN TIME,” television then being something more in the province of science fiction than commercial reality. In a somewhat apologetic preface, the pub - lishers declared, “When a house that has devoted its attention wholly to factual books and journals in the realm of research science or its applications publishes a romance, it is no more than reasonable to explain the phenomenon. Dr. Bell’s Before the Dawn is fiction, written for the love and fun of the thing, and to be read in the same spirit. It is a romance. But it is not mere unguided romancing. There is scientific background for everything he writes. If there is no television in time as a matter of sober fact, it is also a matter of sober fact that the thing is possible; science has sown the seeds. -

The Life of Mary Anning – Biography and Comprehension
The life of Mary Anning – biography and comprehension The life of Mary Anning – set one A rainstorm. Three people and a 15-month-old baby took shelter under a tree. Lightning struck them. Only the baby survived. The baby’s parents said that it was the reason that their sickly baby became alert and lively. This baby was Mary Anning. She was one of the most influential people in history and instrumental in changing the way we see the world. Mary Anning was a fossil hunter! Mary was born on 21 May 1799 in the small coastal town of Lyme Regis. Her family was very poor and her parents had ten children. However, only two, Mary and her brother Joseph, survived. Mary’s father, Richard, was a cabinet maker and fossil hunter. Richard called the fossils he found ‘curiosities’. Richard and Mary would search along the coastline, looking for curiosities and would sell the ones they found to earn extra income. Sadly, in 1810 Richard died from tuberculosis leaving the family in debt. They needed to rely on their fossil hunting skills for survival. Fossils are the preserved remains of a plant or animal that existed in a past geological age. After an animal dies, its body decomposes leaving harder parts like the skeleton behind. This becomes buried by small particles of rock called sediment. As more layers of sediment build, the skeleton starts to compact and turn to rock. The bones start to dissolve by water seeping through the rock and are replaced by minerals to leave a rock replica. -

The Paleontograph______
__________The Paleontograph________ A newsletter for those interested in all aspects of Paleontology Volume 10 Issue 1 March, 2021 _________________________________________________________________ From Your Editor Welcome to our March edition. I hope this issue finds you healthy and safe. Well, it looks like we made it to the other side; at least I hope you all did. My wife and I have been vaccinated and except for feeling lousy for a day after the second shot, we feel great. We are excited for life to return to something close to what was normal. I’m waiting for a big snow storm to hit and it just started coming down as I started to write this. I have some paleo and non paleo trips planned. First being the Tucson show which starts April 9th. I will be at the Mineral and Fossil Alley Show at the Days Inn (formerly Ramada) on the Highway. Room 140, stop in and say hi if you are in town. Bob has written a nice variation of articles for you and I hope you enjoy the issue. I would love to expand our readership. If you someone that might be interested please forward this along. Remember it is free for the asking with an email to me. The Paleontograph was created in 2012 to continue what was originally the newsletter of The New Jersey Paleontological Society. The Paleontograph publishes articles, book reviews, personal accounts, and anything else that relates to Paleontology and fossils. Feel free to submit both technical and non-technical work. We try to appeal to a wide range of people interested in fossils. -

Year 1 Wider Curriculum
Year 1 Remote Learning Wider Curriculum History Mary Anning The World’s Greatest Fossil Hunter Watch this video about Mary Anning. She was a very important fossil hunter. https://www.youtube.com/watch?v=qNOh-85_Dmc This animation about Mary Anning is made with sand and stones from her beach! https://www.youtube.com/watch?v=BEbgTpdwRgI After you have watched the videos, see if you can explain to a grown-up who Mary Anning was. Can you tell them why she was so important? You can find out more about Mary Anning on the Natural History Museum website https://www.nhm.ac.uk/discover/mary-anning-unsung-hero.html Coprolite Mary Anning helped us to know lots about what dinosaurs ate because of her discoveries of coprolite. But what is coprolite? https://www.nhm.ac.uk/discover/what-is-a-coprolite.html Using the Natural History Museum dinosaur directory https://www.nhm.ac.uk/discover/dino-directory.html or books you have at home, choose a dinosaur, find out how big it was (the bigger the dinosaur, the bigger the coprolite!) and where it lived, find out what it’s diet was (what it liked to eat) and then see if you can create a coprolite diagram (as if you were looking at it through a microscope) for your dinosaur. You might want to label the bits of food that you can see in the coprolite. You could do this for all your favourite dinosaurs. Paleoart Mary Anning’s friend, Henry de la Beche, created paintings showing what he imagined the world looked like in dinosaur times. -

Issue 3 November, 2018 ______
__________The Paleontograph________ A newsletter for those interested in all aspects of Paleontology Volume 7 Issue 3 November, 2018 _________________________________________________________________ From Your Editor Welcome to our latest edition. I've decided to produce a special edition. Since the holidays are just around the corner and books make great gifts, I thought a special book review edition might be nice. Bob writes wonderful, deep reviews of the many titles he reads. Reviews usually bring a wealth of knowledge about the book topic as well as an actual review of the work. I will soon come out with a standard edition filled with articles about specific paleo related topics and news. The Paleontograph was created in 2012 to continue what was originally the newsletter of The New Jersey Paleontological Society. The Paleontograph publishes articles, book reviews, personal accounts, and anything else that relates to Paleontology and fossils. Feel free to submit both technical and non-technical work. We try to appeal to a wide range of people interested in fossils. Articles about localities, specific types of fossils, fossil preparation, shows or events, museum displays, field trips, websites are all welcome. This newsletter is meant to be one by and for the readers. Issues will come out when there is enough content to fill an issue. I encourage all to submit contributions. It will be interesting, informative and fun to read. It can become whatever the readers and contributors want it to be, so it will be a work in progress. TC, January 2012 Edited by Tom Caggiano and distributed at no charge [email protected] PALEONTOGRAPH Volume 7 Issue 3 November 2018 Page 2 Patrons of Paleontology--A Review As you might expect from the chapter titles, this is a Bob Sheridan October 14, 2017 fairly specialized book, which is tilted more toward history than science in general, and then very concerned with large illustrated publications about fossils. -

The Artist Who Saw Through Time by RICHARD MILNER
Reprinted with permission from: HISTORIC MASTERS ™ 800.610.5771 or International 011-561.655.8778. CLICK TO SUBSCRIBE M Charles R. Knight: The Artist Who Saw through Time BY RICHARD MILNER GH harles R. Knight (1874-1953) was born in Brooklyn Cand, despite spending most of his life in Manhattan, Charles R. Knight painting early humans painted thousands of animals from the farthest reaches of ambushing a woolly mammoth, c. 1930s. the Earth. Today he is best remembered as the father of Photo colorized by Viktor Deak, 2012 “paleoart,” who opened a window into prehistoric times. Beginning in the 1890s, he dominated that genre for almost half a century, creating vistas of long-vanished animals and landscapes no human has ever beheld. During Knight’s childhood, fossil excavations in the American West were not only the stuff of sensational newspa- per stories, but were also rapidly expanding our knowledge of Earth’s prehistoric past. From 1877 to 1892, the “Bone Wars” waged by paleontologists Edward Drinker Cope and Othniel C. Marsh ultimately filled museums back east with the skele- tons of stegosaurs, apatosaurs, and their kin. Eventually Knight brought those bones to life with his drawings, paintings, and murals for New York City’s American Museum of Natural His- tory and Chicago’s Field Museum. His depictions appeared in such major magazines as The Century, Popular Science, and National Geographic and were endlessly reproduced in books, toys, and comic books, and also on the silver screen. The paleontologist Stephen Jay Gould (1941-2002) opined that Knight had greater influence in establishing what extinct animals looked like than any scientist ever did: “Not since the dictionary and from illustrated bestiaries. -

C:\Documents and Settings\David Glick\My Documents\Nitminsoc
Nittany Mineralogical Society Bulletin Nittany Mineralogical Society, Inc. P.O. Box 10664 State College PA 16805 Editor (see page 8): October, 2014 Visit our web site: www.nittanymineral.org David C. Glick October 15th meeting: Charles R. Knight - Art and Geology by Dr. Charles E. Miller, Jr., with an introduction by Charles R. Knight mural of a Cretaceous confrontation between Triceratops and Rhoda Knight Kalt Tyrannosaurus rex. (Permission from Field Museum of Chicago.) See p. 3. Our October meeting will be held Wednesday the 15th in room 114 (large auditorium) of Earth & Engineering Annual Meeting and Sciences Building on the west side of the Penn State campus in State College, PA. Maps are available on our web site. Elections in October: 6:30 to 7:00 p.m.: Social hour, refreshments in the lobby by David Glick, NMS President 7:00 to 7:30 p.m.: special tribute in lobby - please attend! The October 15th meeting will be the Annual Meeting 7:30 to 7:45 p.m.: brief Annual Meeting and elections; of the Corporation, and will include election of officers. door prize drawings Reports are being provided to members prior to the ~7:45 p.m.: introduction by Rhoda Knight Kalt and meeting. We will keep the business meeting very short program by Dr. Charles E. Miller, Jr. in order to accommodate our program on C. R. Knight. The event has free admission, free parking, and free In accordance with our bylaws, the Board of refreshments, and is open to all; parents/guardians must Directors, acting as the Nominating Committee, provide supervision of minors.