The Marshall Differential Analyzer: a Visual Interpretation of Mathematics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Index to 1986-1998 Sets ( by Series)
Page INDEX to 1986 – 1998 SETS 1 of 13 By Series Instr. Set No. Set Name Series Year Set Picture Manual Notes 1 - Standard Sets 0202(2) Set Nr. 2 Enthusiast 1986 0203(2) Set Nr. 3 Enthusiast 1986 0204(2) Set Nr. 4 Enthusiast 1986 0205(2) Set Nr. 5 Enthusiast 1986 to 1991 0206(2) Set Nr. 6 Enthusiast 1986 to 1991 0207(2) Set Nr. 7 Enthusiast 1986 to 1992 0208(2) Set Nr. 8 Enthusiast 1986 to 1992 0209(2) Set Nr. 9 Enthusiast 1986 to 1992 0210(2) Set Nr. 10 Enthusiast 1986 to 1992 1212(2) Set 2X Enthusiast 1986 Complementary Sets Page INDEX to 1986 – 1998 SETS 2 of 13 By Series Instr. Set No. Set Name Series Year Set Picture Manual Notes 1213(2) Set 3X Enthusiast 1986 Complementary Sets 1214(2) Set 4X Enthusiast 1986 Complementary Sets 1215(2) Set 5X Enthusiast 1986 Complementary to Sets 1991 1216(2) Set 6X Enthusiast 1986 Complementary to Sets 1992 1217(2) Set 7X Enthusiast 1986 Complementary to Sets 1992 1218(2) Set 8X Enthusiast 1986 Complementary to Sets 1992 1219(2) Set 9X Enthusiast 1986 Complementary to Sets 1992 0301(1) Set Nr. 1 Beginners (1) 1987 to 1989 0302(1) Set Nr. 2 Beginners (1) 1987 to 1989 0303(1) Set Nr. 3 Beginners (1) 1987 to 1989 0304(1) Set Nr. 4 Beginners (1) 1987 to 1989 Page INDEX to 1986 – 1998 SETS 3 of 13 By Series Instr. Set No. Set Name Series Year Set Picture Manual Notes 1311(1) Set 1X Beginners (1) 1987 Complementary to Sets 1989 1312(1) Set 2X Beginners (1) 1987 Complementary to Sets 1989 1313(1) Set 3X Beginners (1) 1987 Complementary to Sets 1989 Conversion of 1314(1) Set 4X Beginners (1) 1987 Beginners set 4 Complementary to to Enthusiast set Sets 1989 5 0301(2) Set Nr. -
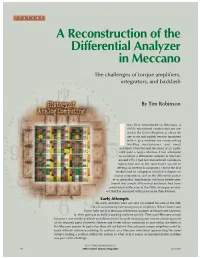
A Reconstruction of the Differential Analyzer in Meccano
FEATURE A Reconstruction of the Differential Analyzer in Meccano The challenges of torque amplifiers, integrators, and backlash By Tim Robinson was first introduced to Meccano, a child’s educational construction set cre- ated in the United Kingdom, at about the age of six and quickly became fascinated with it as a medium for constructing working mechanisms and small machines. Over the next ten years or so, I gath- Iered quite a large collection. I first attempted to construct a differential analyzer in Meccano around 1971. I had just encountered calculus in high school and at the same time I started to develop an interest in computers. One of the first books I read on computers included a chapter on analog computation, and on the differential analyz- er in particular. Significantly, the book briefly men- ©DIGITALVISION tioned that simple differential analyzers had been constructed in Meccano in the 1930s. So began an inter- est that has remained with me for more than 30 years. Early Attempts My early attempts were not very successful because of the diffi- culty of constructing functioning torque amplifiers. When Hartree and Porter built the first Meccano differential analyzer at Manchester Universi- ty, their goal was to build a working machine quickly. They used Meccano simply because it was readily available and allowed them to avoid designing and custom machining most of the required parts. However, Hartree and Porter felt no constraint to stay within the limits of the Meccano system. In particular, they did not believe that adequate torque amplifiers could be made without custom machining. -

MECCANO= WORKERS FIGHT Staff Were Taken Un
CLASS STRU&&LE 14n11119Jiil!JQ!;I•111:ti;JJ1•111111•1:rJ;§IieJltl(tlil:lt111tt«lllni:J;JII!JI:I Vol.3 No.25 December 13th to December 26th 1979 fortnightly Sp MECCANO= WORKERS FIGHT staff were taken un. Work was going out and targets being met. HARDSHIP Wages were low at Meccano. The basic take home pay for operators was £40 per week~ ~ith bonus achieved on an individual basis , take home pay could be £50. Meccano was on of the first to settle in the engineers recent national dispute. The factory closure can only bring incre ~ sed hardship to the 940 workers. Liverpool ' s un employment level of approx. 12% is already much higher than the national average. In some areas of Liverpool such as Speke and Kirby, unemployment stands ·at 20% and even 30%. In the case of Meccano Class Struggle was told of one whole family work ing there and being hit by t he closure. At 4 Q'clock on Friday the 30th of November workers FIGHT BACK at Meccano in Liverpool were- bluntly told that the ~ · ,.4Ji.~·- The workers are taking the only course open to factory was closed and moving out lock~stock and them and that is to fight. The s tocks of toys and barrel. Not even the statutory notice of 90 days machines the workers are holding are s aid to be was given. A failure which even arch-reactionary .worth £2,000 , 000 . This puts them in a r elatively Thatcher had to ~eak out against . The part-timers strong position. -

Meccano Radio Receiving Sets 1
MECCANO RADIO RECEIVING SETS 1 England NAME MECCANO RADIO RECEIVING SET TYPE Special Radio Sets HOLE DIAMETER 4.2mm HOLE SPACING 12.7mm ( ½” ) SETS IN SYSTEM Total of 5 : RS1, RS2. Later No.1, No.2 and ASI Aerial Set. DIFFERENT PARTS 44 COLOUR Plain metal and black FIXING METHOD Nut and bolt MOTORS None PERIOD 1922 to 1926 MANUFACTURER Meccano Ltd., Binns Road, Liverpool, England COMMENTS The original RS1 & RS2 sets were only manufactured for a very short period. They were both the same radio. RS1 being fully built and RS2 being a kit. There were certain objections of infringement from the G.P.O. about the original sets concerning experimental receiving sets which required an additional ‘experimental license fee of 15 shillings, in addition to the normal Broadcast license fee of 10 shilling. Therefore a new Crystal sets were therefore introduced. No.1 being a non-constructional set and No.2 being a constructional set, very similar to the previous RS2. MATERIAL SUPPLIED BY J. Gamble, F.A. Beadle, Bruce Baxter, T. Edwards and Tony Press MECCANO (ENGLAND) - RADIO RECEIVING SETS 2 MECCANO (ENGLAND) - RADIO RECEIVING SETS 3/4 MECCANO (ENGLAND) - RADIO RECEIVING SETS 5 The original RS1/RS2 Crystal set MECCANO (ENGLAND) - RADIO RECEIVING SETS 7a Taken from manual Taken from Meccano Magazine July 1923 MECCANO (ENGLAND) - RADIO RECEIVING SETS 7b Taken from manual Taken from Meccano Magazine July 1923 MECCANO (ENGLAND) - RADIO RECEIVING SETS 7c An original No.1 Crystal set MECCANO (ENGLAND) - RADIO RECEIVING SETS 7d The box for the Radio receiving set – Note the pictures are of standard Meccano – NOT of the radio MECCANO (ENGLAND) - RADIO RECEIVING SETS 7e A replica of the No.2 radio by Tony Press MECCANO (ENGLAND) - RADIO RECEIVING SETS 7f A replica of the No.2 radio by Tony Press . -

{TEXTBOOK} Dinky Toys Ebook
DINKY TOYS PDF, EPUB, EBOOK David Cooke | 40 pages | 04 Mar 2008 | Bloomsbury Publishing PLC | 9780747804277 | English | London, United Kingdom Dinky Vintage Diecast Cars, Trucks and Vans for sale | eBay All Auction Buy it now. Sort: Best Match. Best Match. View: Gallery view. List view. Only 3 left. The Dinky Collection 4x models from the s. Dinky Toys Humber Hawk, very good condition. Only 1 left. Results pagination - page 1 1 2 3 4 5 6 7 8 9 Hot this week. Dinky replacement tyres 17mm block tread for army vans DD7. Got one to sell? Shop by category. Vehicle Type see all. Car Transporter. Commercial Vehicle. Tanker Truck. Scale see all. Vehicle Make see all. Colour see all. Year of Manufacture see all. Material see all. Vehicle Year see all. This has influenced the value of vintage Dinky toys from this era. Dinky toys for sale are often valued higher, too, if they come with their original packaging. Skip to main content. Filter 1. Shop by Vehicle Type. See All - Shop by Vehicle Type. Shop by Vehicle Make. See All - Shop by Vehicle Make. All Auction Buy It Now. Sort: Best Match. Best Match. View: Gallery View. List View. Guaranteed 3 day delivery. Dinky SuperToys France No. Dinky Toys No. Benefits charity. Dinky Toys France No. Results Pagination - Page 1 1 2 3 4 5 6 7 8 9 Dinky One stop shop for all things from your favorite brand. Shop now. Hot This Week. Dinky Commer Hook No. Got one to sell? You May Also Like. Other Diecast Vehicles. -

Lincoln International Closes Legendary Toy Brand Transaction
LINCOLN INTERNATIONAL: CONSUMER GROUP TRANSACTION ANNOUNCEMENT Lincoln International Closes Legendary Toy Brand Transaction When Ingroup and 21 Centrale Partners contemplated an exit of their iconic French toy company, they sought advisors with depth of experience, powerful industry relationships and a track record of achieving premium valuations. Therefore, they selected Lincoln International’s Consumer team to take the lead. Lincoln’s senior & Ingroup investment bankers designed a process to deliver a focused message based on the Company’s key value drivers: Meccano’s leading brands in the fast growing have sold construction segment of the toy industry, strong international footprint, powerful multi- channel distribution network, flexible manufacturing and outsourcing strategy, attractive upside due to licensing opportunities and the launch of a new line emphasizing gameplay and realism. The process led to multiple compelling strategic options. Ultimately, the Company was sold to Spin Master Ltd. (“Spin Master”) which was eager to grow the Meccano and Erector brands through its renowned innovation to capabilities and global distribution network. Relevant Industry Verticals Toys Licensing International Sourcing Branded Products Consumer Goods Toy Manufacturing Transaction Overview Company Description: Founded over 100 years ago, Meccano is a pioneer in the construction toy universe. The Company manufactures and markets timeless model construction sets made of metal parts, nuts and bolts or flexible plastic components. Meccano’s legendary brand benefits from 95% prompted awareness in two of its strongest core markets (France and the UK). With exports accounting for 60% of total sales, Meccano boasts a strong international footprint with a presence in nearly 40 countries, including the US through the Erector brand. -

M.A.X.-Prozessor-Modul, 1 IR-Sensor-Modul, 2 Intelligente Motorenmodule, 1 LED-Modul, 1 Servomotor (3 Kg), 1 Microservomotor (1,9 Kg), 1 USB-Kabel
MMECCANO. ADVANCEDA.X XFACTOR. 17401 CAUTION - ELECTRIC TOY – Not recommended for children under 10 years of age. As with all electric products, precautions should be observed during the handling and use to prevent electric shock. MISE EN GARDE : JOUET ÉLECTRIQUE – Non recommandé pour les enfants de moins de 10 ans. Comme Instructions avec tous les autres produits électriques, des précautions s'imposent durant la manipulation et l'utilisation afin d'éviter les Notice de montage chocs électriques. Instrucciones de construcción Bauanleitung WARNING: Adapter cord could be a strangulation hazard. Not for use by children under 3 years of age. ATTENTION ! 1x Ni-MH1 800 mAh Le cordon de l'adaptateur présente un risque de strangulation. Included • Fournie • Incluida • enthalten Ne pas laisser à la portée des enfants de moins de 3 ans. I am programmed to speak in English. To change my language, go to www.meccano.com Je suis programmé pour parler anglais. Pour changer ma langue, rends-toi sur www.meccano.com Me han programado para hablar en inglés. Para cambiar de idioma, entra en www.meccano.com Ich bin auf Englisch vorprogrammiert. Du ndest deine Sprache als Softwarepaket auf www.meccano.com 1 FCC Statement: This device complies with Part 15 of the FCC rules. Operation is subject to the following two conditions: (1) This device may not cause harmful interference, and (2) This device must accept any interference received, including interference that may cause undesired operation. This equipment has been tested and found to comply with the limits for Class B digital devices pursuant to Part 15 of the FCC rules. -
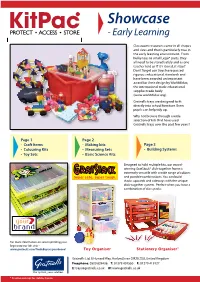
Early Learning Showcase - Craft Items, Colouring and Toy Sets
Showcase KitPac - Early Learning Classroom resources come in all shapes and sizes and that is particularly true in the early learning environment. From bulky toys to small Lego® parts, they all need to be stored safely and as one teacher told us ‘if it’s stored, it stays!’ Don’t forget our trays have passed rigorous educational standards and have been awarded an important award for their design by Worlddidac, the international trade educational supplies trade body (www.worlddidac.org). Gratnells trays are designed to fit directly into school furniture. Even pupils can help tidy up. Why not browse through a wide selection of kits that have used Gratnells trays over the past few years? Page 1 Page 2 - Craft Items - Making kits Page 3 - Colouring Kits - Measuring Sets - Building Systems - Toy Sets - Basic Science Kits Designed to hold multiple kits, our award- winning GratStack® click-together frame is extremely versatile with a wide range of colours and possible combinations. You can build stacks upwards and sideways with the unique click-together system. Perfect when you have a combination of class packs. TM For more information on screen printing your logo onto our lids visit - www.gratnells.com/TradeBuyers/yourbrand Toy Organiser Stationery Organiser* Gratnells Ltd, 8 Howard Way, Harlow,Essex CM20 2SU, United Kingdom Freephone: 0500 829406 T: 01279 401550 F: 01279 419127 E: [email protected] W: www.gratnells.co.uk * Creative concept for stabilo, France. Early Learning Showcase - Craft items, colouring and toy sets. Farm Set InterStar Class Set Packed by Borgione Centro Popoids Figure Set Halitit Ltd, UK. -

HISTORY of TOYS: Timeline 4000 B.C - 1993 Iowa State University
A BRIEF HISTORY OF TOYS By Tim Lambert Early Toys Before the 20th century children had few toys and those they did have were precious. Furthermore children did not have much time to play. Only a minority went to school but most children were expected to help their parents doing simple jobs around the house or in the fields. Egyptian children played similar games to the ones children play today. They also played with toys like dolls, toy soldiers, wooden animals, ball, marbles, spinning tops and knucklebones (which were thrown like dice). In Ancient Greece when boys were not at school and girls were not working they played ball games with inflated pig's bladders. They also played with knucklebones. Children also played with toys like spinning tops, dolls, model horses with wheels, hoops and rocking horses. Roman children played with wooden or clay dolls and hoops. They also played ball games and board games. They also played with animal knucklebones. Toys changed little through the centuries. In the 16th century children still played with wooden dolls. (They were called Bartholomew babies because they were sold at St Bartholomew's fair in London). They also played cup and ball (a wooden ball attached by string to the end of a handle with a wooden cup on the other end. You had to swing the handle and try and catch the ball in the cup). Modern Toys The industrial revolution allowed toys to be mass produced and they gradually became cheaper. John Spilsbury made the first jigsaw puzzle in 1767. He intended to teach geography by cutting maps into pieces but soon people began making jigsaws for entertainment. -

Liverpool, 13
Il BINNS ROAD LIVERPOOL, 13 j1935.19a6 i __?vtECiANÒ;D, - ENGINEERNG FOR BOYS 2VLECCANO WORLD FAMOUS•PRODUCTS MECCANO IN 1935—FINER THAN EVER! The Meccano System has now reached a degree of perfection surpassing aJl preious achievements. lt in the ideal toy, combining simpilcity and beauty of colour and finsh f MECCAN The world-tamous Meccano ta Construcoonal tOy increases with everything necessary for reproducing in miniature almost any type of mechanism. fascination for boys evory year. Hundreds of working models, mechanical The new Manuals of lnstructions show a bdy how to obtain the utmost possible (un and from a simple crane to the most advanced engineering movements, can be bujlt with it, interest (ram his Outfit, whatever its size and explain exactly how to build up his and new and delightful additions are regularly being Outfit step step until construct the made. There are aver 300 by he is able to wonder(ui models described in the engineering parts in the system, all accurately range of Meccano Super Model Leaflets. made and standardised, and with the aid of the profusely iliustrated lnstructions, Book 01 a screwdriver and a spanner—ail included in everyOutfìt_boys The Meccano boy’s greatest thrill is experienced when he sets a completed can commence to build and erljoy themselves at once. model to work, by means of a Meccano Motor, in an exactly similar manner to its proto HORNBY TRAINS, This in che dawn of the eiectric toy age and the type. The new Meccano Magic Clockwork Motor is ideal (or this purpose. This new Hornby Electric Trains reach the pinnacle of electrical perfection. -

Technograph5919441945cham.Pdf
L I E> I^ARY OF THE U N IVLRSITY or ILLINOIS G20.5 TH ..59 AtTGF'^HAl-t STA6«S' o^ ,^ .<o ^# -^i^cc;*'/ rH Juuiuv m, iiLk iiiE last link in the 10-mile Shasta Dam convey- The Convejnr Co. 32«u E. Slauson ilvenu* lo9 Angeles, CdliTeml* in"; system is a mile and a half unit made by the Atteotloni Ur. U.S.Saxo, Prasi^ent, Conveyor Company of Los Angeles, using 17,500 New As joa toiDH, our use of tho trougtilng cor.voTor system at Sh&sta D&3 using NeM ijepsrture CoavoTor EtoU bearings and Installed by your cospai)/, Departure Self-Sealed Ball Bearings of two types. ^3 about Goopleted. '.;hen this Job was being discussed at the start, m questlonod ttm u» of Mew Departure Sealed Conveyor bearings in service on ^6 inctt belts For nearly four years this system has handled 13 Carrying six inch rock at 1,50 feet per lUnute, Considering that even ii; the building of uouldor Jan h« had not hii as large a conveyor problea, »« mre raluctant to experliMnt any aor* than ii« million tons of rock as big as 6 inches in diameter. hbd to In designing equip.unt for Shasta Dam. l^oH, after nearly four years irlth extreioely low and satisfactory .^'i> tenance costs, appraxiastely 13|0>M,C>^ tons hav« been handled vrith this The satisfactory service obtained is proof that these c^ulpnent. tie know that the greatest savljig In the use of thta deili^ ma In t^ft self-sealed "Lubricated-for-life" ball bearings are not alialnation of lubricAtins and of cleaning up after lubricating, uada possible by the use of sealed bearings. -

Meccano Parts 1970-1992 (France)
page MECCANO PARTS 1970 – 1992 (France) 1 of 34 Please see colour/material codes and notes at the bottom Part Number Col Year Found in sets / Old New our Mat Part Name Intr. / notes 1 A301 zn Perforated strip, 12 ½”, 32 cm 1970 1 a A801 zn Perforated strip, 9 ½”, 24 cm 1970 1 b A501 zn Perforated strip, 7 ½”, 19 cm 1970 grod 1973 Meccakits Armee 2 A202 zn Perforated strip, 5 ½”, 14 cm 1970 blF 1982 Trucker Fleet set Grand Prix set grod 1973 Meccakits Armee wt 1982 Hyper Space set ylF 1974 Meccakits Travaux Publics 2 a A302 zn Perforated strip, 4 ½”, 115 mm 1970 ylF 1974 Meccakits Travaux Publics 3 A203 zn Perforated strip, 3 ½”, 90 mm 1970 ylF 1974 Meccakits Travaux Publics 4 A304 zn Perforated strip, 3”, 75 mm 1970 5 A105 zn Perforated strip, 2 ½”, 60 mm 1970 blF 1982 Trucker Fleet set grod 1973 Meccakits Armee wt 1982 Hyper Space set page MECCANO PARTS 1970 – 1992 (France) 2 of 34 Please see colour/material codes and notes at the bottom Part Number Col Year Found in sets / Old New our Mat Part Name Intr. / notes ylF 1974 Meccakits Travaux Publics 6 B146 zn Perforated strip, 2”, 50 mm, 5 holes 1970 blF 1982 Trucker Fleet set 6 a A506 zn Perforated strip, 1 ½”, 38 mm 1970 blF 1982 Trucker Fleet set 7 A175 zn Angle Girder, 24 ½”, 62 cm 1970 7 a zn Angle Girder, 18 ½”, 47 cm 1970 8 A508 zn Angle Girder, 12 ½”, 32 cm 1970 blF 1982 3000 set 8 a zn Angle Girder, 9 ½”, 24 cm 1970 blF 1982 3000 set wt 1982 Trucker Fleet set Hyper Space set ylF 1974 Meccakits Travaux Publics 8 b A509 zn Angle Girder, 7 ½”, 19 cm 1970 blF 1982 Trucker Fleet set ylF 1974 Meccakits Travaux Publics 9 A507 zn Angle Girder, 5 ½”, 14 cm 1970 blF 1982 2000 and 3000 sets page MECCANO PARTS 1970 – 1992 (France) 3 of 34 Please see colour/material codes and notes at the bottom Part Number Col Year Found in sets / Old New our Mat Part Name Intr.