Microbubbles As Proxies for Oil Spill Delineation in Field Tests
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Basic Concepts in Oceanography
Chapter 1 XA0101461 BASIC CONCEPTS IN OCEANOGRAPHY L.F. SMALL College of Oceanic and Atmospheric Sciences, Oregon State University, Corvallis, Oregon, United States of America Abstract Basic concepts in oceanography include major wind patterns that drive ocean currents, and the effects that the earth's rotation, positions of land masses, and temperature and salinity have on oceanic circulation and hence global distribution of radioactivity. Special attention is given to coastal and near-coastal processes such as upwelling, tidal effects, and small-scale processes, as radionuclide distributions are currently most associated with coastal regions. 1.1. INTRODUCTION Introductory information on ocean currents, on ocean and coastal processes, and on major systems that drive the ocean currents are important to an understanding of the temporal and spatial distributions of radionuclides in the world ocean. 1.2. GLOBAL PROCESSES 1.2.1 Global Wind Patterns and Ocean Currents The wind systems that drive aerosols and atmospheric radioactivity around the globe eventually deposit a lot of those materials in the oceans or in rivers. The winds also are largely responsible for driving the surface circulation of the world ocean, and thus help redistribute materials over the ocean's surface. The major wind systems are the Trade Winds in equatorial latitudes, and the Westerly Wind Systems that drive circulation in the north and south temperate and sub-polar regions (Fig. 1). It is no surprise that major circulations of surface currents have basically the same patterns as the winds that drive them (Fig. 2). Note that the Trade Wind System drives an Equatorial Current-Countercurrent system, for example. -

World Ocean Thermocline Weakening and Isothermal Layer Warming
applied sciences Article World Ocean Thermocline Weakening and Isothermal Layer Warming Peter C. Chu * and Chenwu Fan Naval Ocean Analysis and Prediction Laboratory, Department of Oceanography, Naval Postgraduate School, Monterey, CA 93943, USA; [email protected] * Correspondence: [email protected]; Tel.: +1-831-656-3688 Received: 30 September 2020; Accepted: 13 November 2020; Published: 19 November 2020 Abstract: This paper identifies world thermocline weakening and provides an improved estimate of upper ocean warming through replacement of the upper layer with the fixed depth range by the isothermal layer, because the upper ocean isothermal layer (as a whole) exchanges heat with the atmosphere and the deep layer. Thermocline gradient, heat flux across the air–ocean interface, and horizontal heat advection determine the heat stored in the isothermal layer. Among the three processes, the effect of the thermocline gradient clearly shows up when we use the isothermal layer heat content, but it is otherwise when we use the heat content with the fixed depth ranges such as 0–300 m, 0–400 m, 0–700 m, 0–750 m, and 0–2000 m. A strong thermocline gradient exhibits the downward heat transfer from the isothermal layer (non-polar regions), makes the isothermal layer thin, and causes less heat to be stored in it. On the other hand, a weak thermocline gradient makes the isothermal layer thick, and causes more heat to be stored in it. In addition, the uncertainty in estimating upper ocean heat content and warming trends using uncertain fixed depth ranges (0–300 m, 0–400 m, 0–700 m, 0–750 m, or 0–2000 m) will be eliminated by using the isothermal layer. -

Introduction to Oceanography
Introduction to Oceanography Introduction to Oceanography Lecture 14: Tides, Biological Productivity Memorial Day holiday Monday no lab meetings Go to any other lab section this week (and let the TA know!) Bay of Fundy -- low tide, Photo by Dylan Kereluk, . Creative Commons A 2.0 Generic, Mudskipper (Periophthalmus modestus) at low tide, photo by OpenCage, Wikimedia Commons, Creative http://commons.wikimedia.org/wiki/File:Bay_of_Fundy_-_Tide_Out.jpg Commons A S-A 2.5, http://commons.wikimedia.org/wiki/File:Periophthalmus_modestus.jpg Tides Earth-Moon-Sun System Planet-length waves Cyclic, repeating rise & fall of sea level • Earth-Sun Distance – Most regular phenomenon in the oceans 150,000,000 km Daily tidal variation has great effects on life in & around the ocean (Lab 8) • Earth-Moon Distance 385,000 km Caused by gravity and Much closer to Earth, but between Earth, Moon & much less massive Sun, their orbits around • Earth Obliquity = 23.5 each other, and the degrees Earth’s daily spin – Seasons Photos by Samuel Wantman, Creative Commons A S-A 3.0, http://en.wikipedia.org/ wiki/File:Bay_of_Fundy_Low_Tide.jpg and Figure by Homonculus 2/Geologician, Wikimedia Commons, http://en.wikipedia.org/wiki/ Creative Commons A 3.0, http://en.wikipedia.org/wiki/ File:Bay_of_Fundy_High_Tide.jpg File:Lunar_perturbation.jpg Tides are caused by the gravity of the Moon and Sun acting on Scaled image of Earth-Moon distance, Nickshanks, Wikimedia Commons, Creative Commons A 2.5 Earth and its ocean. Pluto-Charon mutual orbit, Zhatt, Wikimedia Commons, Public -

Exploration of the Deep Gulf of Mexico Slope Using DSV Alvin: Site Selection and Geologic Character
Exploration of the Deep Gulf of Mexico Slope Using DSV Alvin: Site Selection and Geologic Character Harry H. Roberts1, Chuck R. Fisher2, Jim M. Brooks3, Bernie Bernard3, Robert S. Carney4, Erik Cordes5, William Shedd6, Jesse Hunt, Jr.6, Samantha Joye7, Ian R. MacDonald8, 9 and Cheryl Morrison 1Coastal Studies Institute, Louisiana State University, Baton Rouge, Louisiana 70803 2Department of Biology, Penn State University, University Park, Pennsylvania 16802-5301 3TDI Brooks International, Inc., 1902 Pinon Dr., College Station, Texas 77845 4Department of Oceanography and Coastal Sciences, Louisiana State University, Baton Rouge, Louisiana 70803 5Department of Organismic and Evolutionary Biology, Harvard University, 16 Divinity Ave., Cambridge, Massachusetts 02138 6Minerals Management Service, Office of Resource Evaluation, New Orleans, Louisiana 70123-2394 7Department of Geology, University of Georgia, Athens, Georgia 30602 8Department of Physical and Environmental Sciences, Texas A&M – Corpus Christi, Corpus Christi, Texas 78412 9U.S. Geological Survey, 11649 Leetown Rd., Keameysville, West Virginia 25430 ABSTRACT The Gulf of Mexico is well known for its hydrocarbon seeps, associated chemosyn- thetic communities, and gas hydrates. However, most direct observations and samplings of seep sites have been concentrated above water depths of approximately 3000 ft (1000 m) because of the scarcity of deep diving manned submersibles. In the summer of 2006, Minerals Management Service (MMS) and National Oceanic and Atmospheric Admini- stration (NOAA) supported 24 days of DSV Alvin dives on the deep continental slope. Site selection for these dives was accomplished through surface reflectivity analysis of the MMS slope-wide 3D seismic database followed by a photo reconnaissance cruise. From 80 potential sites, 20 were studied by photo reconnaissance from which 10 sites were selected for Alvin dives. -

Coastal Upwelling Revisited: Ekman, Bakun, and Improved 10.1029/2018JC014187 Upwelling Indices for the U.S
Journal of Geophysical Research: Oceans RESEARCH ARTICLE Coastal Upwelling Revisited: Ekman, Bakun, and Improved 10.1029/2018JC014187 Upwelling Indices for the U.S. West Coast Key Points: Michael G. Jacox1,2 , Christopher A. Edwards3 , Elliott L. Hazen1 , and Steven J. Bograd1 • New upwelling indices are presented – for the U.S. West Coast (31 47°N) to 1NOAA Southwest Fisheries Science Center, Monterey, CA, USA, 2NOAA Earth System Research Laboratory, Boulder, CO, address shortcomings in historical 3 indices USA, University of California, Santa Cruz, CA, USA • The Coastal Upwelling Transport Index (CUTI) estimates vertical volume transport (i.e., Abstract Coastal upwelling is responsible for thriving marine ecosystems and fisheries that are upwelling/downwelling) disproportionately productive relative to their surface area, particularly in the world’s major eastern • The Biologically Effective Upwelling ’ Transport Index (BEUTI) estimates boundary upwelling systems. Along oceanic eastern boundaries, equatorward wind stress and the Earth s vertical nitrate flux rotation combine to drive a near-surface layer of water offshore, a process called Ekman transport. Similarly, positive wind stress curl drives divergence in the surface Ekman layer and consequently upwelling from Supporting Information: below, a process known as Ekman suction. In both cases, displaced water is replaced by upwelling of relatively • Supporting Information S1 nutrient-rich water from below, which stimulates the growth of microscopic phytoplankton that form the base of the marine food web. Ekman theory is foundational and underlies the calculation of upwelling indices Correspondence to: such as the “Bakun Index” that are ubiquitous in eastern boundary upwelling system studies. While generally M. G. Jacox, fi [email protected] valuable rst-order descriptions, these indices and their underlying theory provide an incomplete picture of coastal upwelling. -

WOODS HOLE OCEANOGRAPHIC INSTITUTION Deep-Diving
NEWSLETTER WOODS HOLE OCEANOGRAPHIC INSTITUTION AUGUST-SEPTEMBER 1995 Deep-Diving Submersible ALVIN WHOI Names Paul Clemente Sets Another Dive Record Chief Financial Officer The nation's first research submarine, the Deep Submergence Paul CI~mente, Jr., a resident of Hingham Vehicle (DSV) Alvin. passed another milestone in its long career and former Associate Vice President for September 20 when it made its 3,OOOth dive to the ocean floor, a Financial Affairs at Boston University, as· record no other deep-diving sub has achieved. Alvin is one of only sumed his duties as Associate Director for seven deep-diving (10,000 feet or more) manned submersibles in the Finance and Administration at WHOI on world and is considered by far the most active of the group, making October 2. between 150 and 200 dives to depths up to nearly 15,000 feet each In his new position Clemente is respon· year for scientific and engineering research . sible for directing all business and financial The 23-1001, three-person submersible has been operated by operations of the Institution, with specifIC Woods Hole Oceanographic Institution since 1964 for the U.S. ocean resp:>nsibility for accounting and finance, research community. It is owned by the OffICe of Naval Research facilities, human resources, commercial and supported by the Navy. the National Science Foundation and the affairs and procurement operations. WHOI, National Oceanic and Atmospheric Administration (NOAA). Alvin the largest private non· profit marine research and its support vessel, the 21 0-100t Research Vessel Atlantis II, are organization in the U.S., has an annual on an extended voyage in the Pacific which began in January 1995 operating budget of nearly $90 million and a with departure from Woods Hole. -

Deep Ocean Wind Waves Ch
Deep Ocean Wind Waves Ch. 1 Waves, Tides and Shallow-Water Processes: J. Wright, A. Colling, & D. Park: Butterworth-Heinemann, Oxford UK, 1999, 2nd Edition, 227 pp. AdOc 4060/5060 Spring 2013 Types of Waves Classifiers •Disturbing force •Restoring force •Type of wave •Wavelength •Period •Frequency Waves transmit energy, not mass, across ocean surfaces. Wave behavior depends on a wave’s size and water depth. Wind waves: energy is transferred from wind to water. Waves can change direction by refraction and diffraction, can interfere with one another, & reflect from solid objects. Orbital waves are a type of progressive wave: i.e. waves of moving energy traveling in one direction along a surface, where particles of water move in closed circles as the wave passes. Free waves move independently of the generating force: wind waves. In forced waves the disturbing force is applied continuously: tides Parts of an ocean wave •Crest •Trough •Wave height (H) •Wavelength (L) •Wave speed (c) •Still water level •Orbital motion •Frequency f = 1/T •Period T=L/c Water molecules in the crest of the wave •Depth of wave base = move in the same direction as the wave, ½L, from still water but molecules in the trough move in the •Wave steepness =H/L opposite direction. 1 • If wave steepness > /7, the wave breaks Group Velocity against Phase Velocity = Cg<<Cp Factors Affecting Wind Wave Development •Waves originate in a “sea”area •A fully developed sea is the maximum height of waves produced by conditions of wind speed, duration, and fetch •Swell are waves -

A Laboratory Model of Thermocline Depth and Exchange Fluxes Across Circumpolar Fronts*
656 JOURNAL OF PHYSICAL OCEANOGRAPHY VOLUME 34 A Laboratory Model of Thermocline Depth and Exchange Fluxes across Circumpolar Fronts* CLAUDIA CENEDESE Physical Oceanography Department, Woods Hole Oceanographic Institution, Woods Hole, Massachusetts JOHN MARSHALL Department of Earth, Atmospheric and Planetary Sciences, Massachusetts Institute of Technology, Cambridge, Massachusetts J. A. WHITEHEAD Physical Oceanography Department, Woods Hole Oceanographic Institution, Woods Hole, Massachusetts (Manuscript received 6 January 2003, in ®nal form 7 July 2003) ABSTRACT A laboratory experiment has been constructed to investigate the possibility that the equilibrium depth of a circumpolar front is set by a balance between the rate at which potential energy is created by mechanical and buoyancy forcing and the rate at which it is released by eddies. In a rotating cylindrical tank, the combined action of mechanical and buoyancy forcing builds a strati®cation, creating a large-scale front. At equilibrium, the depth of penetration and strength of the current are then determined by the balance between eddy transport and sources and sinks associated with imposed patterns of Ekman pumping and buoyancy ¯uxes. It is found 2 that the depth of penetration and transport of the front scale like Ï[( fwe)/g9]L and weL , respectively, where we is the Ekman pumping, g9 is the reduced gravity across the front, f is the Coriolis parameter, and L is the width scale of the front. Last, the implications of this study for understanding those processes that set the strati®cation and transport of the Antarctic Circumpolar Current (ACC) are discussed. If the laboratory results scale up to the ACC, they suggest a maximum thermocline depth of approximately h 5 2 km, a zonal current velocity of 4.6 cm s21, and a transport T 5 150 Sv (1 Sv [ 106 m3 s 21), not dissimilar to what is observed. -

Tidal and Wind-Driven Currents from Oscr
FEATURE TIDAL AND WIND-DRIVEN CURRENTS FROM OSCR By David Prandle TWO IMPORTANTASPECTS of tidal currents are (1) be seen by comparing calculations of M, tidal vor- their temporal coherence and (2) their constancy ticity distributions <OV/OX- c?U/OY> from OSCR (over centuries). The first rigorous evaluation of an measurements with corresponding model calcula- Ocean Surface Current Radar (OSCR) system ex- tions (Prandle 1987). ploited these characteristics using sequential de- Tidal Residuals ployments of the one available unit with subse- The propagation of tidal energy from the quent combination of radial components to ocean into shelf seas produces an attendant net construct tidal ellipses (Prandle and Ryder 1985). residual current Uo of 0.5(OUD)cos 0 (0, oscil- Specifications for Tidal Mapping lating current amplitude; c, elevation amplitude: The Rayleigh criterion for separation of closely D, water depth: O, phase difference between lJ spaced constituents in tidal analysis suggests ob- and {). In U.K. waters Uo is typically 0-3 cm s ' servational periods exceeding the related beat fre- compared with 0 of 40-100 cm s ', thus conven- • . enhanced reso- quency, this dictates 15 d of observations to sepa- tional current meters often fail to resolve U~,. lution of the instru- rate the two largest constituents M~ and St. For Moreover, numerical models that accurately sim- tidal elevations this criterion is often relaxed: ulate M z may not resolve U,, with the same accu- mentation reveals however, while elevations show a noise:tidal sig- racy. Year-long deployments of OSCR, in the finer scale dynamical nal ratio of 0(0.1-0.2), the same ratio for currents Dover Straits (Prandle et al., 1993) and the North is 0(0.5). -

OCEAN SUBDUCTION Show That Hardly Any Commercial Enhancement Finney B, Gregory-Eaves I, Sweetman J, Douglas MSV Program Can Be Regarded As Clearly Successful
1982 OCEAN SUBDUCTION show that hardly any commercial enhancement Finney B, Gregory-Eaves I, Sweetman J, Douglas MSV program can be regarded as clearly successful. and Smol JP (2000) Impacts of climatic change and Model simulations suggest, however, that stock- Rshing on PaciRc salmon over the past 300 years. enhancement may be possible if releases can be Science 290: 795}799. made that match closely the current ecological Giske J and Salvanes AGV (1999) A model for enhance- and environmental conditions. However, this ment potentials in open ecosystems. In: Howell BR, Moksness E and Svasand T (eds) Stock Enhancement requires improvements of assessment methods of and Sea Ranching. Blackwell Fishing, News Books. these factors beyond present knowledge. Marine Howell BR, Moksness E and Svasand T (1999) Stock systems tend to have strong nonlinear dynamics, Enhancement and Sea Ranching. Blackwell Fishing, and unless one is able to predict these dynamics News Books. over a relevant time horizon, release efforts are Kareiva P, Marvier M and McClure M (2000) Recovery not likely to increase the abundance of the target and management options for spring/summer chinnook population. salmon in the Columbia River basin. Science 290: 977}979. Mills D (1989) Ecology and Management of Atlantic See also Salmon. London: Chapman & Hall. Ricker WE (1981) Changes in the average size and Mariculture, Environmental, Economic and Social average age of PaciRc salmon. Canadian Journal of Impacts of. Salmonid Farming. Salmon Fisheries: Fisheries and Aquatic Science 38: 1636}1656. Atlantic; Paci\c. Salmonids. Salvanes AGV, Aksnes DL, FossaJH and Giske J (1995) Simulated carrying capacities of Rsh in Norwegian Further Reading fjords. -
Physical Oceanography - UNAM, Mexico Lecture 3: the Wind-Driven Oceanic Circulation
Physical Oceanography - UNAM, Mexico Lecture 3: The Wind-Driven Oceanic Circulation Robin Waldman October 17th 2018 A first taste... Many large-scale circulation features are wind-forced ! Outline The Ekman currents and Sverdrup balance The western intensification of gyres The Southern Ocean circulation The Tropical circulation Outline The Ekman currents and Sverdrup balance The western intensification of gyres The Southern Ocean circulation The Tropical circulation Ekman currents Introduction : I First quantitative theory relating the winds and ocean circulation. I Can be deduced by applying a dimensional analysis to the horizontal momentum equations within the surface layer. The resulting balance is geostrophic plus Ekman : I geostrophic : Coriolis and pressure force I Ekman : Coriolis and vertical turbulent momentum fluxes modelled as diffusivities. Ekman currents Ekman’s hypotheses : I The ocean is infinitely large and wide, so that interactions with topography can be neglected ; ¶uh I It has reached a steady state, so that the Eulerian derivative ¶t = 0 ; I It is homogeneous horizontally, so that (uh:r)uh = 0, ¶uh rh:(khurh)uh = 0 and by continuity w = 0 hence w ¶z = 0 ; I Its density is constant, which has the same consequence as the Boussinesq hypotheses for the horizontal momentum equations ; I The vertical eddy diffusivity kzu is constant. ¶ 2u f k × u = k E E zu ¶z2 that is : k ¶ 2v u = zu E E f ¶z2 k ¶ 2u v = − zu E E f ¶z2 Ekman currents Ekman balance : k ¶ 2v u = zu E E f ¶z2 k ¶ 2u v = − zu E E f ¶z2 Ekman currents Ekman balance : ¶ 2u f k × u = k E E zu ¶z2 that is : Ekman currents Ekman balance : ¶ 2u f k × u = k E E zu ¶z2 that is : k ¶ 2v u = zu E E f ¶z2 k ¶ 2u v = − zu E E f ¶z2 ¶uh τ = r0kzu ¶z 0 with τ the surface wind stress. -
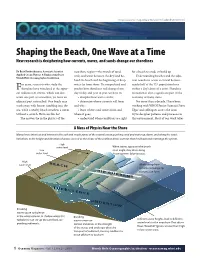
Shaping the Beach, One Wave at a Time New Research Is Deciphering How Currents, Waves, and Sands Change Our Shorelines
http://oceanusmag.whoi.edu/v43n1/raubenheimer.html Shaping the Beach, One Wave at a Time New research is deciphering how currents, waves, and sands change our shorelines By Britt Raubenheimer, Associate Scientist nearshore region—the stretch of sand, for a beach to erode or build up. Applied Ocean Physics & Engineering Dept. rock, and water between the dry land be- Understanding beaches and the adja- Woods Hole Oceanographic Institution hind the beach and the beginning of deep cent nearshore ocean is critical because or years, scientists who study the water far from shore. To comprehend and nearly half of the U.S. population lives Fshoreline have wondered at the appar- predict how shorelines will change from within a day’s drive of a coast. Shoreline ent fickleness of storms, which can dev- day to day and year to year, we have to: recreation is also a significant part of the astate one part of a coastline, yet leave an • decipher how waves evolve; economy of many states. adjacent part untouched. One beach may • determine where currents will form For more than a decade, I have been wash away, with houses tumbling into the and why; working with WHOI Senior Scientist Steve sea, while a nearby beach weathers a storm • learn where sand comes from and Elgar and colleagues across the coun- without a scratch. How can this be? where it goes; try to decipher patterns and processes in The answers lie in the physics of the • understand when conditions are right this environment. Most of our work takes A Mess of Physics Near the Shore Many forces intersect and interact in the surf and swash zones of the coastal ocean, pushing sand and water up, down, and along the coast.