A New Robocup@Home Challenge
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fourth International Conference on Porous Media and Its Applications in Science, Engineering and Industry
Program Fourth International Conference on Porous Media and its Applications in Science, Engineering and Industry June 17-22, 2012 Potsdam, Germany Chair Kambiz Vafai University of California, Riverside, USA Co-Chairs Adrian Bejan Duke University, USA Akira Nakayama Shizuoka University, Japan Engineering Conferences International 32 Broadway, Suite 314 New York, NY 10004, USA Phone: 1 - 212 - 514 - 6760, Fax: 1 - 212 - 514 - 6030 www.engconfintl.org – [email protected] Seminaris Seehotel Potsdam An der Pirschneide 40 D-14471 Potsdam Germany Tel: +49 (0) 331 9090-0 Fax: +49 (0) 331 9090-900 Engineering Conferences International (ECI) is a not-for-profit global engineering conferences program, originally established in 1962, that provides opportunities for the exploration of problems and issues of concern to engineers and scientists from many disciplines. ECI BOARD MEMBERS Barry C. Buckland, President Peter Gray Michael King Raymond McCabe David Robinson William Sachs Eugene Schaefer P. Somasundaran Deborah Wiley Chair of ECI Conferences Committee: William Sachs ECI Technical Liaison for this conference: Frank Schmidt ECI Director: Barbara K. Hickernell ECI Associate Director: Kevin M. Korpics ©Engineering Conferences International International Organizing Committee Prof. Antonio Barletta (Università di Bologna, Italy), Prof. Jacob Bear (Technion, Israel), Prof. Adrian Bejan (Duke University, USA), Prof. Faruk Civan (University of Oklahoma, USA), Dr. Fabien Frizon (CEA Marcoule, France), Dr. Robin Gerlach (Montana State University, USA), Prof. S. Majid Hassanizadeh (Utrecht University, Netherlands), Prof. Reiner Helmig (Universitaet Stuttgart, Germany), Prof. Rudolf Hilfer (Universität Stuttgart, Germany), Prof. Massoud Kaviany (University of Michigan, USA), Prof. Arzhang Khalili (Max Planck Institute for Marine Microbiology, Germany), Prof. Andrey Kuznetsov (North Carolina State University, USA), Louis-Philippe Lefebvre (National Research Council, Canada), Dr. -

Apply for a Research Assignment in the Faculty of Engineering Technology, University of Twente
How to … apply for a research assignment in the Faculty of Engineering Technology, University of Twente Target group of this document: students, - who are currently studying full time at a university outside the Netherlands, - who are interested in doing a research assignment within the Faculty of Engineering Technology, - and have found a potential supervisor within one of the research departments of the Faculty of Engineering Technology (www.utwente.nl/en/et/research/) 1. Introduction 1 1.1. Terminology 1 1.2. Important remarks befóre you start with the application 2 2. Application procedure 2 2.1. Nomination vs. application 2 2.2. Continuing with the application form 4 2.3. Continuing the application process 5 1. Introduction 1.1. Terminology When you receive/read this document, you have shown an interest in joining the Faculty of Engineering Technology for a certain period of time, to conduct a research assignment under the supervision of a member of staff of this Faculty. For you, this research assignment might serve as your master assignment, bachelor assignment, thesis work, graduation work, internship, placement, external training, etc. For us, this research assignment is always considered as a ‘placement’, and will be booked either as a so-called “Capita selecta” course (MSc students; different course codes) or as “Research assignment for exchange students of the Faculty of Engineering Technology” (BSc level; course code: 201800519). In your communication with a member of staff make it clear that you are not asking to be accepted for a ‘graduation assignment’, but for a ‘research assignment which you will use at home for your graduation’. -

Scope Topics Multibody System Dynamics Colloquia Supporting
Call for Papers Scope Topics The language of the Colloquium is English. Authors The colloquium addresses the method of multibody • Numerically efficient multibody system dynamics wishing to contribute to the Colloquium are invited to system dynamics for advanced technologies and techniques; submit a two page abstract to the chairmen by e-mail engineering design for which a numerical efficient • Design principles for exact constraint; before October 12, 2011. The abstract shall follow the approach is crucial. In particular a designer can take • Underconstraint and overconstraint mechanical format of the Colloquium abstract template (see the significant advantage of model based dynamical systems; web site). Authors will receive notification of analysis. The numerical methods applied for multibody • Underactuated and overactuated compliant acceptance of their proposed contribution by systems dynamics have proved to offer solutions for mechanisms; November 16, 2011. An abstracts booklet containing the analysis of systems with interconnected rigid and • Flexible multibody dynamics and reduced order all the contributions will be given to the delegates at flexible bodies subject to various loads and undergoing modelling; the Colloquium. The number of participants will be complex motion. While high accuracy can be obtained • Mechatronic design and control systems; limited and preference will be given to active with extended models including a large number of • Parameter optimisation and manufacturing researchers in the field. Confirmation of participation degrees of freedom, there is a clear need for tolerances; in the Colloquium by the authors will be required numerically efficient techniques that still offer an • Simulation for engineering design; when papers are accepted. Only confirmed adequate level of accuracy. -

Innovative Teaching and Learning Methods
The Future of Engineering Education Parallel Sessions I Innovative Teaching and Learning Methods Time: 2 April 2020, 2pm – 4pm Venue: Congress Centre Darmstadtium Abstract The session will start with presentations of a wide variety of innovative teaching and learning tech- nologies and methodologies. The talks deal with virtual reality (VR) and open source technology, vir- tual exchange programs between partner universities, students solving tasks in interdisciplinary teams, and train the teacher in a way that they can awaken enthusiasm among students for technical issues. After the presentations, all participants will actively be involved to discuss the influence these new methodologies and technologies have on the organization as a whole and the student and teacher specifically. Among other questions: Does the use of new technologies influence the skills teachers need to adapt to these new technologies? Which social skills are necessary to train the stu- dent to face the societal challenges of the future? Keywords and concepts Virtual reality, New Technologies in Teaching, Motivational Methods Contributors Professor Albert Albers (Karlsruhe Institute of Technology, KIT) Professor Albert Albers has been head of the IPEK – Institute of Product Engineering since 1996. After his studies of mechanical engineering at the University of Hannover from 1978 to 1983, Albers had an assistantship at the Institute of Machine Elements and Engineering Design and obtained his doctorate in 1987. From 1986 to 1988 Albers had a position as a senior engineer at the Institute of Machine Elements and Engineering Design at the University of Hannover until he started his career in industry at LuK, a company of the Schaef-er-Group with focus on clutch- and gear-systems. -
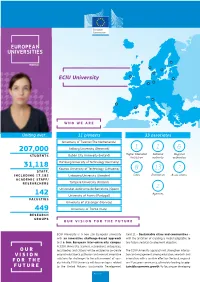
ECIU University
ECIU University WHO WE ARE Uniting over… 11 pioneers 33 associates University of Twente (The Netherlands) 1 1 6 207,000 Aalborg University (Denmark) Dublin City University (Ireland) Higher Education National Regional STUDENTS Institution authority authorities Hamburg University of Technology (Germany) 31,118 Kaunas University of Technology (Lithuania) 8 13 2 STAFF, INCLUDING 17,182 Linköping University (Sweden) Cities Enterprises Associations ACADEMIC STAFF/ Tampere University (Finland) RESEARCHERS 2 Universitat Autònoma de Barcelona (Spain) Agencies 142 University of Aveiro (Portugal) FACULTIES University of Stavanger (Norway) 449 University of Trento (Italy) RESEARCH GROUPS OUR VISION FOR THE FUTURE ECIU University is a new pan-European university Goal 11 – Sustainable cities and communities – with an innovative challenge-based approach with the ambition of creating a model adaptable to and a true European inter-university campus. any future societal development objective. At ECIU University, learners, researchers, enterprises, OUR local bodies and citizens will be enabled to co-create The ECIU University approach will strengthen interac- VISION original educational pathways and relevant innovative tion and engagement among education, research and solutions for challenges to the advancement of soci- innovation, with a positive effect on the local, regional FOR THE ety. Initially, ECIU University will focus on topics related and European community, ultimately leading to sus- FUTURE to the United Nations Sustainable Development tainable -

M06-Attendies
Graduate School on Control 2011 M6 - Cooperative Navigation and Control of Multiple Robotic Vehicles from 21/02/2011 to 25/02/2011 Family Name First Name Company Service City Country Email Akbati Onur Yildiz Technical University Control & Automation Dept.Istanbul Turkey [email protected] Attia Rachid Université de Haute-Alsace, MIPS Mulhouse Cedex France [email protected] Chaos García Dictino UNED Assistant Professor madrid Spain [email protected] Colombo Alessio DISI - University of Trento PhD student Povo (TN) Italy [email protected] Colombo Leonardo Institito de Cienias Matematicas-ConsejoPh. Superior D student e InvestigacionesMadrid Científicas (ICMAT-CSIC) Spain [email protected]; [email protected] Dorogush Elena Moscow State University postgraduate student Moscow Russia [email protected] Esqueda Donovan Supelec Automatique Gif sur Yvette France [email protected] Fabregas Acosta Ernesto National University for Distance Education of Spain (UNED) Madrid Spain [email protected] Feng Xinkui LSS Supelec Orsay France [email protected] Fioravanti Andre Supelec l2s Gif-sur-Yvette France [email protected] Geamanu Marcel Stefan L2S Gif-sur-Yvette France [email protected] Jafarian Matin University of Twente; Faculty of Engineering Technology (CTW) Enschede The [email protected] Jiménez Fernando ICMAT-CSIC Researcher-Grad. StudentMadrid Spain [email protected] Makarem Laleh EPFL Lausanne Switzerland [email protected] Mansal Fulgence UCAD Departement -

University of Twente: the Entrepreneurial University of the Netherlands Through Hi-Tech and Human Touch
University of Twente: The entrepreneurial university of the Netherlands through hi-tech and human touch Enschede, Netherlands 1 General Information Title University of Twente Pitch The entrepreneurial university of the Netherlands through hi-tech and hu- man touch Organisations University of Twente and Kennispark Twente Country The Netherlands Authors Arno Meerman (University Industry Innovation Network) Nature of Collaboration in R&D Lifelong learning Commercialisation of R&D Joint curriculum design and interaction results delivery Mobility of staff Mobility of students Academic entrepreneurship Student entrepreneurship Governance Shared resources Supporting Strategic Structural mechanism Operational Policy Summary The University of Twente (UT) together with the Kennispark Twente, are key drivers behind regional innovation and growth and the renaissance of the Twente region. From its foundation in 1961 during difficult local economic conditions, UT has grown into a world-class entrepreneurial university through its top-to-bottom innovative and entrepreneurial institutional cul- ture, its human resource strategy (i.e. hiring entrepreneurial and innovative staff members) and its strong regional network. Their activities have led to over 100 new start-ups per year on average, over 1,000 spin-offs still opera- tional to date, and in excess of 20,000 jobs created. The UT spin-offs also ac- count for 10% of the fastest growing high-tech companies in the Benelux countries. All of these factors, together with the number one Valorisation University Award in the Netherlands in 2015, highlight why UT has a world- wide reputation for entrepreneurship. 2 Introduction & Overview 1. BACKGROUND The University of Twente (UT) is a public higher education institution located in Enschede (The Neth- erlands) with approximately 3,000 staff members, 9,700 students, and degree programmes offered in engineering, social and behavioural sciences. -

Télécom Paristech / LTCI
Research Report 2009-2011 ~ Télécom ParisTech / LTCI février 2012 Laboratoire Traitement et Communication de l’Information - UMR 5141 Télécom ParisTech - CNRS Research Report 2009–2011 Laboratoire Traitement et Communication de l’Information Institut Tel´ ecom´ - Tel´ ecom´ ParisTech & CNRS February 2012 2 Contents 1 General Survey 9 1.1 Organization . .9 1.1.1 Tel´ ecom´ ParisTech and Institut Tel´ ecom´ . .9 1.1.2 Tel´ ecom´ ParisTech and LTCI (Laboratory for Communication and Process- ing of Information) . 10 1.1.3 Tel´ ecom´ ParisTech and ParisTech . 10 1.1.4 Organization at LTCI . 11 1.1.5 Personnel in the Service of Research . 11 1.2 Research at a glance . 12 1.2.1 Positioning of Telecom ParisTech research . 12 1.2.2 Major orientations in the period . 13 1.2.3 Highlights of research at Telecom ParisTech over the period . 14 1.2.4 International Research program . 16 1.2.5 Scientific production . 16 1.2.6 Participation to Investissements d’Avenir .................... 17 I Communications and Electronics 21 2 Digital Communications 25 2.1 Objectives . 26 2.2 Main Results . 27 2.2.1 Wireless Network Optimization . 27 2.2.2 Coding for single-user communication . 28 2.2.3 Optical communications . 30 2.2.4 Security issues . 30 2.2.5 Tools for Information Theory and Statistics . 31 2.3 References . 32 2.3.1 ACL: Articles in ISI-Indexed Journals . 32 2.3.2 ACTI: Articles in Proceedings of International Conferences . 33 2.3.3 OS: Books and Book Chapters . 36 2.3.4 AP: Other productions . -

Annual Report 2019
Department of Ghent University Materials, Textiles and Department of Materials, Textiles and Chemical Engineering (MaTCh) Chemical Engineering Centre for Textile Science and Engineering (MaTCh) ANNUAL REPORT Technologiepark 70A Tech Lane Ghent Science Park – Campus A (A5b and A5c) 9052 Ghent (Zwijnaarde) BELGIUM Tel: +32 9 264 57 35 Fax: +32 9 264 58 46 2019 http://textiles.UGent.be @UGentTextiles UGent Centre for Textile Science and Engineering Centre for Textile Science and Engineering The one and only objective and comprehensive textile group in the Benelux ISO/IEC17025 055-test Cover: Nanofibre filters for environmental challenges (Visual by Timo Meireman). 90 Years of Excellence through Passion & Commitment ‘Centre of Excellence’ for Textile Science and Engineering 7 CONTENTS VOORWOORD 9 FOREWORD 11 GENERAL 13 EDUCATION 18 INTERNATIONAL RELATIONS 28 RESEARCH AND INNOVATION 37 SERVICES TO INDUSTRY 70 PUBLICATIONS 75 9 VOORWOORD Het jaar 2019 was een bijzonder en buitengewoon gunstig jaar voor de textielafdeling van de Universiteit Gent. Het onderwijs kende een nieuw hoogtepunt met ruime interesse. Het onderzoek floreerde als nooit tevoren met tal van innovatieve en toekomstgerichte activiteiten. Wat betreft de wetenschappelijke dienstverlening werden alle records gebroken : nooit eerder was er zo een grote interactie met de (Europese) industrie en nooit eerder was de impact naar die industrie zo uitgesproken. De internationale uitstraling van de textielactiviteiten van het textielcentrum was nooit zo groot. Dit werd bevestigd door de deelname aan het congres AUTEX 2019 in Gent onder de titel Textiles at the Crossroads www.autex2019.org Meer dan 300 deelnemers uit nagenoeg 50 landen gaven het beste van zichzelf en bewezen dat textiel onderzoek een multidisciplinaire activiteit is, gedragen door een grote mondiale familie met zin voor innovatie en aandacht voor duurzaamheid op het hoogste wetenschappelijke en technologische vlak. -

European Partner Universities to University of Southern Denmark
European partner universities to University of Southern Denmark Austria FH Joanneum FHS Kufstein Tirol University of Applied Sciences Graz University of Technology Management Center Innsbruck MODUL University Vienna Salzburg University of Applied Sciences University of Applied Sciences Technikum Wien University of Applied Sciences Upper Austria University of Applied Sciences Wiener Neustadt University of Graz University of Vienna Belgium Ghent University Hasselt University ICHEC Brussels Management School KU Leuven Université Catholique de Louvain University College Gent Bulgaria Sofia University 'Saint Kliment Ohridski' Technical University of Sofia Croatia University of Zadar Cypern University of Cyprus Czech Republic Brno University of Technology Charles University in Prague Czech Technical University in Prague Czech University of Life Sciences Prague Masaryk University Metropolitan University Prague University of Economics, Prague University of Palacky University of Pardubice University of West Bohemia VSB - Technical University of Ostrava Denmark University of Greenland University of the Faroe Islands Estonia Tallinn University of Applied Sciences (TTK) Tallinn University of Technology University of Tartu Finland Hanken School of Economics Lappeenranta University of Technology Oulu University of Applied Sciences South-Eastern Finland University of Applied Sciences Tampere University of Applied Sciences (TAMK) Tampere University of Technology University of Eastern Finland University of Helsinki University of Jyväskylä University of -

2019 USF Nexus Initiative (UNI) Awards Request for Proposals
1 2019 USF Nexus Initiative (UNI) Awards Request for Proposals Program Goals and Description The University of South Florida Nexus Initiative (UNI), administered through the Office of the Provost at USF, offers tenured/tenure-track and full-time research faculty members the opportunity to collaborate with global and national partners in research, scholarly, and innovative efforts with the potential to significantly advance current human understanding and address pressing societal needs. UNI has the following goals: (1) to enhance the research and scholarly activity of faculty members at USF by enabling a variety of partnerships that provide both intellectual and infrastructure stimulus to catalyze and extend ongoing work at USF; (2) to provide avenues for the exploration of joint research and scholarship with external partners and initiate activities currently not possible at USF; (3) to enable opportunities for developing sustained research and scholarship programs with high-impact researchers at other institutions through the submission and funding of joint grant proposals; and (4) to create opportunities for our best graduate students to expand the breadth of their research and scholarly experience through participation in multi-investigator (potentially interdisciplinary) inquiry. Proposals are requested for two avenues offering awards responsive to the broad goals of UNI: The USF Faculty Global Collaboration Initiative offers tenured/tenure-track and full-time research faculty members UNI Awards of up to $15,000 in annual support for travel and expense funds to collaborate with a colleague at an institution of higher education outside the U.S. to engage in research and scholarly activities. The USF Faculty National Collaboration Initiative offers tenured/tenure-track and full-time research faculty members UNI Awards of up to $10,000 in annual support for travel and expense funds to collaborate with a colleague at an institution of higher education within the U.S. -
Viewed and Recommendations Were Given, These Conclusions Are Written Down in Chapter 7
University of Twente EEMCS / Electrical Engineering Robotics and Mechatronics Image-Guided Control of a Continuum Robot S.L. (Sander) Janssen MSc Report Committee: Prof.dr.ir. S. Stramigioli Dr. S. Misra J. Jahya, MSc R.J. Roesthuis, MSc Ir. E.E.G. Hekman November 2012 Report nr. 030RAM2012 Robotics and Mechatronics EE-Math-CS University of Twente P.O. Box 217 7500 AE Enschede The Netherlands ! Abstract This study presents the development of a continuum robot which could serve as part of a surgical robot. Continuum robots, because of their dexterous nature and continuous shape are suited for minimally invasive surgery. Their inherent flexibility also reduces the risk of damage. Continuum robots have these properties due to the absence of discrete joints. Previous research in the domain of continuum robots has focused on developing kinematic and dynamic models. These models attempt to take in account as much of the inherent imperfections such as friction and fabrication errors as possible. This study instead focussed on showing that a simple kinematic model based on the ideal behaviour of the robot is sufficient when combined with a closed-loop controller with 3D position feedback. A continuum robot and its actuator have been developed. The continuum robot was tendon actuated. It consisted of a flexible nitinol backbone with four disc shaped tendon guides fixed equidistantly to each other to it. Two designs of robot were created: A 160 mm length robot with 5 mm radius tendon guides and a 160 mm one with 10 mm radius tendon guides. The actuator was fitted with four motors to pull the tendons and had a translation stage for an insertion movement.