Planning, Design, and Operational Analysis of Underground Freight
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
DRAFT 8/8/2013 Updates at Chapter 59 -- Three Tales of Two St
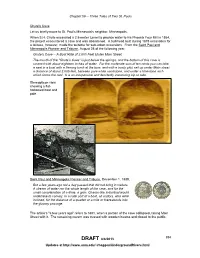
Chapter 59 -- Three Tales of Two St. Pauls Chute's Cave Let us briefly move to St. Paul's Minnesota's neighbor, Minneapolis. When S.H. Chute excavated a 2.5-meter tunnel to provide water to his Phoenix Four Mill in 1864, the project encountered a cave and was abandoned. A bulkhead built during 1875 excavation for a tailrace, however, made the suitable for sub-urban excursions. From the Saint Paul and Minneapolis Pioneer and Tribune, August 26 of the following year, Chute's Cave -- A Boat Ride of 2,000 Feet Under Main Street. The mouth of the "Chute's Cave" is just below the springs, and the bottom of this cave is covered with about eighteen inches of water. For the moderate sum of ten cents you can take a seat in a boat with a flaming torch at the bow, and with a trusty pilot sail up under Main street a distance of about 2,000 feet, between pure white sandstone, and under a limestone arch which forms the roof. It is an inexpensive and decidedly interesting trip to take. Stereopticon view showing a flat- bottomed boat and pole. Saint Paul and Minneapolis Pioneer and Tribune, December 1, 1889, But a few years ago not a day passed that did not bring in visitors. A stream of water ran the whole length of the cave, and for the small consideration of a dime, a grim, Charon-like individual would undertake to convey, in a rude sort of a boat, all visitors, who were inclined, for the distance of a quarter or a mile or thereabouts into the gloomy passage. -

K26-00827-2015-V043-N002.Pdf
2 CRF NEWSLETTER President’s Column Volume 43, No.2 By: Ed Klausner established 1973 As I mentioned in my last column, the CRF Send all articles and reports for submission to: Board of Directors elected me as president dur- Laura Lexander, Editor [email protected] ing our annual meeting on October 3, 2014. 21551 SE 273rd Ct., Maple Valley, WA 98038 That meeting was held in Sequoia / Kings Can- yon National Park. The CRF is governed by a The CRF Newsletter is a quarterly publication of the Cave board of Directors. Our by-laws state that there Research Foundation, a non-profit organization incorpo- shall be 7 to 9 Directors. These Directors try to rated in 1957 under the laws of Kentucky for the purpose represent the various interests of the CRF. Each of furthering research, conservation, and education about year, the Directors elect the officers (president, caves and karst. vice president, secretary, and treasurer), opera- Newsletter Submissions & Deadlines: tions managers, and the Directors for the fol- Original articles and photographs are welcome. If intend- lowing year. CRF JVs don’t have a vote in this ing to jointly submit material to another publication, please process, but they do have a voice. If you have inform the CRF editor. Publication cannot be guaranteed, any questions, concerns, or suggestions you can especially if submitted elsewhere. All material is subject to contact any Director, operations manager, or revision unless the author specifically requests otherwise. officer. My email address is ed.klausner@cave For timely publication, please observe these deadlines: -research.org and I will attempt to address your comments. -

The Number of the Beast
Generated by ABC Amber LIT Converter, http://www.processtext.com/abclit.html Robert A Heinlein - The Number of the Beast Copyright (c) 1980 Robert A. Heinlein Contents PART ONE The Mandarin's Butterfly I "-- it is better to marry than to burn." -- Saul of Tarsus II "This Universe never did make sense --" III "-- Professor Moriarty isn't fooled --" IV Because two things equal to the same thing are never equal to each other. V "-- a wedding ring is not a ring in my nose --" VI Are men and women one race? VII _"Avete, Alieni, nos morituri vos spernimus!"_ VIII "Let us all preserve our illusions --" IX Most males have an unhealthy tendency to obey laws. X "`-- and he had two horns like a lamb, and he spake as a dragon'!" XI "-- citizens must protect themselves." XIII Being too close to a fireball can worry a man -- XIV "Quit worrying and enjoy the ride." XV "We'll hit so hard we'll hardly notice it." XVI -- a maiden knight, eager to break a lance -- XVII The world wobbled -- XVIII "-- the whole world is alive." PART TWO The Butterfly's Mandarin XIX Something is _gained_ in translation -- XX -- right theory, wrong universe. XXI -- three seconds is a _long_ time -- XXII "From each according to his ability, to each according to his needs." XXIII "The farce is over." XXIV Captains aren't supposed to cry. XXV "-- leave bad enough alone!" XXVI The Keys to the City XXVII "Are you open to a bribe?" XXVIII "He's too fat." XXIX "-- we place no faith in princes." XXX "Different physical laws, a different topology." XXXI "-- the first ghosts ever to -

475257 1 En Bookbackmatter 173..320
Appendix 1 Lunar and Mars Satellites and Rovers A.1.1 Lunar Satellites and Rovers Due to page limitations, only missions flown within the last quarter century are listed. Clementine Orbiter Officially called the Deep Space Program Science Experiment (DSPSE), the Cle- mentine mission was a joint space project between the DoD’s Ballistic Missile Defense Organization (BMDO) and NASA. Launched on January 25, 1994, the objective was to test sensors and spacecraft components under extended exposure to the space environment and to make scientific observations of the Moon and the near-Earth asteroid 1620 Geographos. The project was named after the song “Oh My Darling, Clementine” because after it had finished its mission the spacecraft would be “lost and gone forever.” The lunar observations included imaging at various wavelengths in the visible, ultraviolet and infrared parts of the spectrum, laser ranging altimetry, gravimetry, and charged particle measurements. These observations were for the purposes of obtaining multi-spectral imaging of the entire lunar surface, assessing the surface mineralogy, obtaining altimetry from 60Nto60S latitude, and obtaining gravity data for the near side of the Moon. On reaching Geographos it was to determine the size, shape, rotational characteristics, surface properties, and cratering rates of the asteroid. Clementine carried seven distinct experiments: • Ultraviolet/Visible Camera. • Near Infrared Camera. • Long Wavelength Infrared Camera. © Springer Nature Switzerland AG 2019 173 M. von Ehrenfried, From Cave Man to Cave Martian, Springer Praxis Books, https://doi.org/10.1007/978-3-030-05408-3 174 Appendix 1 • High Resolution Camera. • Two Star Tracker Cameras. • Laser Altimeter. • Charged Particle Telescope. -
Complete Issue
EDITORIAL EDITORIAL Sixty-Five and Still Going Strong Journal of Cave and Karst Studies MALCOLM S. FIELD It is with great pleasure and satisfaction for me that sulfidic karst habitats (A. Engel); the latter two crossing the with this Special Issue of the Journal of Cave and Karst earth science and biological divisions of cave karst studies. Studies we mark the 65th Anniversary of the National Other significant areas of coverage in the Journal in the Speleological Society (NSS) which occurred in 2006. The past, but now more rarely submitted for publication are last such special issue marked the 25th Anniversary of the archaeology, exploration, and social sciences. Cave archae- NSS. ology and the NSS (G. Crothers, P. Willey, and P. Watson) This particular special issue is especially gratifying documents directions the field has taken over the years. because it also represents a major change in the way the The importance of cave exploration and scientific research, Journal is now put together. Authors, associate editors a subject area that may be regarded as the legacy of the (AEs), reviewers, and numerous others will find what I NSS but that has been sorely lacking over the past several believe are major improvements to the Journal publishing years, is covered in this issue (P. Kambesis). Even more process. rarely, a social science paper on the creation of a karst database (L. Florea and B. Fratesi) has been included. ARTICLES IN THIS ISSUE Lastly, a paper on the human health aspects of exploring and working in caves with elevated levels of radon has been First, I want to point out that for this Anniversary Issue included (M. -

Technical Program Technical Program | 1 Technical Program
TECHNICAL PROGRAM TECHNICAL PROGRAM TECHNICAL PROGRAM | 1 TECHNICAL PROGRAM SUNDAY, JUNE 13 | 1:00 pm MONDAY, JUNE 14 | 8:30 am The State of Dispute Resolution Boards in the Tunnel Industry CONTRACT PRACTICES (The Good, the Bad and the Ugly) Chairs: James Corcoran, Traylor Bros., Inc., Session Chair: Mike Vitale, Mott MacDonald Frank Huber, Metro Vancouver, Burnaby, British Columbia, CA Panelists: Mike Roach, Traylor Brothers; David Hatem, Attorney, Donovan Hatem LLP; Joe Gildner, Sponsored by: The Walsh Group Sound Transit Seattle, WA; and Fred Dunham, DRB practitioner and former contractor We tunnelers have a long history with DRB’s, as they were born of necessity in the Tunnel Industry and used for the first time on the Eisenhower Tunnel in 1974. The Dispute Resolution Board Foundation (DRBF) was formed in 1996, dedicated to promoting the avoidance and resolution of disputes worldwide, providing guidelines for the practice as well as training for DRB practitioners and participants alike. Just recently the UCA and the CMAR Delivery Targets Effective Management of Risks in Achieving DRBF signed a cooperative agreement, in recognition of the close ties and shared values between the two Water Supply Objectives organizations. With the DRBF turning 25 this year, what better time to pause and take stock of the state of Chris Mueller, Black & Veatch, Houston, Texas US; Savita Schlesinger, Loudoun Water, Ashburn, DRBs in our industry. Where have we been, where are we now and what can we expect in the future? Virginia US; Sarah Lothman, Loudoun Water, Ashburn, Virginia US; Michael Hanna, Black & Veatch, Gaithersburg, Maryland US; Cary Hirner, Black & Veatch, Kansas City, Missouri US To share their varied perspectives on this question, we have assembled an expert panel of highly- experienced Loudoun Water is currently implementing a quarry to reservoir conversion that will improve water supply individuals with extensive experience using, or serving on, DRBs from a wide cross section of the industry. -

University College London Faculty of the Built Environment Bartlett School of Planning
UNIVERSITY COLLEGE LONDON FACULTY OF THE BUILT ENVIRONMENT BARTLETT SCHOOL OF PLANNING Urban design and the near future of city logistics A sustainable placemaking approach Juan José Víctor Raúl Arrué Rubín de Celis Being a dissertation submitted to the faculty of The Built Environment as part of the requirements for the award of the MSc Urban Design and City Planning at University College London: I declare that this dissertation is entirely my own work and that ideas, data and images, as well as direct quotations, drawn from elsewhere are identified and referenced. (signature) 5 September 2016 Word count (main body): 9951 Word count (appendices): 1242 Acknowledgements I thank my supervisor, Pablo Sendra, for his guidance and support over the research process. I especially thank Lotte Bech, a specialist on cycle planning, for showing me the city of Copenhagen and teaching me about the Danish cycling projects; to Gary Armstrong, from Outspoken Delivery, for welcoming me in their offices in Cambridge and sharing with me his valuable experience; and to Benedicte Swennen and the European Cyclists’ Federation for letting me participate in one workshop in Gothenburg. I thank Chevening Scholarships, the UK government’s global scholarship programme, funded by the Foreign and Commonwealth Office (FCO) and partner organisations, for funding my studies. I also thank my friends who received me in some European cities during my fieldwork; my colleagues from The Bartlett School of Planning, who listened to me talking about my research topic over and over again, and gave me many ideas for my dissertation. Finally, I thank my family and friends, who accompanied me all over the whole process. -

Hyperloop: a Breakthrough for Vacuum Transportation?
Hyperloop: a breakthrough for vacuum transportation? Technology analysis and evaluation of com- mercial prospects Basel, 13.03.2020 Issuer BAK Economics AG Project Management Klaus Jank, T +41 61 279 97 24 [email protected] Editorial Staff Adolf J. Dörig Martin Eichler Klaus Jank Robert Vogel Communication Marc Bros de Puechredon, T +41 61 279 97 25 [email protected] Copyright Copyright © 2020 by BAK Economics AG Contents Executive summary ................................................................................................................ 5 1 Introduction ............................................................................................................. 9 2 Hyperloop: definition and core technologies ................................................... 10 2.1 The term hyperloop: a variant of vacuum transportation ............................ 10 2.2 Core technologies ........................................................................................ 11 2.3 Conclusion .................................................................................................... 13 3 Advantages and disadvantages of vacuum transport ................................... 14 3.1.1 Travel speed and time.................................................................................. 14 3.1.2 Costs ............................................................................................................ 16 3.1.3 Capacity ....................................................................................................... -
Science Fiction Video Games Focuses on Games That Are Part of the Science Fiction Genre, Rather Than Set in Magical Milieux Or Exaggerated Versions of Our Own World
SCIENCE FICTION Science Fiction Video Games focuses on games that are part of the science fiction genre, rather than set in magical milieux or exaggerated versions of our own world. Unlike many existing books and websites that cover some of the same material, this video games book emphasizes critical analysis, especially the analysis of narrative. The author analyzes narrative via an original categorization of story forms in games. He also discusses video games as works of science fiction, including their characteristic themes and the links between them and other forms of science fiction. Neal Tringham The beginning chapters explore game design and the history of science-fictional video games. The majority of the text deals with individual science-fictional games and the histories and natures of their various forms, such as the puzzle-based adventure and the more exploratory and immediate computer role-playing game (RPG). Features • Focuses exclusively on video games from the science fiction genre—the first book to do so • Provides critical descriptions and encyclopedic overviews of a wide range of the most important science fiction video games • Explores the connections between science fiction video games and other science fiction forms, such as tabletop RPGs, film, and television • Explains the themes that define science fiction video games • Presents a well-researched account of the history of science fiction games About the Author Neal Tringham is a videogame developer, a former astrophysicist, and a Fellow of the Royal Astronomical Society. He is also a contributing editor of and contributor to the third edition of the Encyclopedia of Science Fiction, winner of the 2012 Hugo Award for Best Related Work.