Model of a Mechanical Clock Escapement John Wagner Clemson University, [email protected]
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
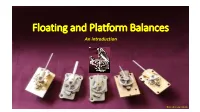
Floating and Platform Balances an Introduction
Floating and Platform Balances An introduction ©Darrah Artzner 3/2018 Floating and Platform Balances • Introduce main types • Discuss each in some detail including part identification and function • Testing and Inspecting • Cleaning tips • Lubrication • Performing repairs Balance Assembly Type Floating Platform Floating Balance Frame Spring stud Helicoid spring Hollow Tube Mounting Post Regulator Balance wheel Floating Balance cont. Jewel Roller Pin Paired weight Hollow Tube Safety Roller Pivot Wire Floating Balance cont. Example Retaining Hermle screws Safety Roller Note: moving fork Jewel cover Floating Balance cont. Inspecting and Testing (Balance assembly is removed from movement) • Inspect pivot (suspension) wire for distortion, corrosion, breakage. • Balance should appear to float between frame. Top and bottom distance. • Balance spring should be proportional and not distorted in any way. • Inspect jewels for cracks and or breakage. • Roller pin should be centered when viewed from front. (beat) • Rotate balance wheel three quarters of a turn (270°) and release. It should rotate smoothly with no distortion and should oscillate for several (3) minutes. Otherwise it needs attention. Floating Balance cont. Cleaning • Make sure the main spring has been let down before working on movement. • Use non-aqueous watch cleaner and/or rinse. • Agitate in cleaner/rinse by hand or briefly in ultrasonic. • Rinse twice and final in naphtha, Coleman fuel (or similar) or alcohol. • Allow to dry. (heat can be used with caution – ask me how I would do it.) Lubrication • There are two opinions. To lube or not to lube. • Place a vary small amount of watch oil on to the upper and lower jewel where the pivot wire passed through the jewel holes. -

A Brief History of the Great Clock at Westminster Palace
A Brief History of the Great Clock at Westminster Palace Its Concept, Construction, the Great Accident and Recent Refurbishment Mark R. Frank © 2008 A Brief History of the Great Clock at Westminster Palace Its Concept, Construction, the Great Accident and Recent Refurbishment Paper Outline Introduction …………………………………………………………………… 2 History of Westminster Palace………………………………………………... 2 The clock’s beginnings – competition, intrigues, and arrogance …………... 4 Conflicts, construction and completion …………………………………….. 10 Development of the gravity escapement ……………………………………. 12 Seeds of destruction ………………………………………………………….. 15 The accident, its analysis and aftermath …………………………………… 19 Recent major overhaul in 2007 ……………………………………………... 33 Appendix A …………………………………………………………………... 40 Footnotes …………………………………………………………………….. 41 1 Introduction: Big Ben is a character, a personality, the very heart of London, and the clock tower at the Houses of Parliament has become the symbol of Britain. It is the nation’s clock, instantly recognizable, and brought into Britain’s homes everyday by the BBC. It is part of the nation’s heritage and has long been established as the nation’s timepiece heralding almost every broadcast of national importance. On the morning of August 5th 1976 at 3:45 AM a catastrophe occurred to the movement of the great clock in Westminster Palace. The damage was so great that for a brief time it was considered to be beyond repair and a new way to move the hands on the four huge exterior dials was considered. How did this happen and more importantly why did this happen and how could such a disaster to one of the world’s great horological treasures be prevented from happening again? Let us first go through a brief history leading up to the creation of the clock. -

The Case of Switzerland and the World Watch Industry *
469 Technological discontinuities and flexible production networks: The case of Switzerland and the world watch industry * Amy Glasmeier tain and augment their competitiveness in a global Unrr~rs~t~of Texas at Austin, Texas, USA economy. On the eve of the electronics revolution, the Swiss watch production system, centered in the mountainous Jura region, was flexible, cost The twentieth-century history of the Swiss watch industry effective, and extremely profitable. Both horizon- illustrates how cultures and industrial production systems ex- tally and vertically disintegrated, the Swiss system perience great difficulty adapting to external change at differ- offered enormous variety while maintaining qual- ent points in time. The current emphasis on production net- ity and timeliness of delivery. “The multiplicity of works - unique reservoirs of potential technological innovation realized through cooperation rather than competition among enterprises, and the competition and emulation firms - lacks a detailed appreciation of historic networks, and that characterized the industry, yielded a product in particular their fragile character in times of economic of superior quality known the world over for high turmoil. While networks can and do promote innovation within fashion, design, and precision” [21, p. 481. an existing technological framework, historical experience sug- Beginning in the 1970s when foreign competi- gests their fragmented, atomistic structure is subject to dis- organization and disintegration during periods of technological tion hurdled technological frontiers in watch change. An exclusive focus on “production” ignores other movements, advancing from mechanical to elec- constraints that are powerful forces governing the reaction tric, electronic, digital and finally quartz technol- abilities of regions. Previous research has largely relied on a ogy, the Jura’s undisputed dominance ended. -

A History of the Citizen Watch Company, from the Pages of Watchtime Magazine
THE WORLD OF FINE WATCHES SPOTLIGHT www.watchtime.com A HISTORY OF THE CITIZEN WATCH COMPANY, FROM THE PAGES OF WATCHTIME MAGAZINE CCIITTIIZZEENN THe HisTory of ciTizen One of the original Citizen pocket watches that went on THE sale in December 1924 CITIZEN WATCH STORY How a Tokyo jeweler’s experiment in making pocket watches 84 years ago led to the creation of a global watch colossus n the 1920s, the young Emperor of Japan, than the imports. To that end, Yamazaki found - Goto. The mayor was a friend of Yamazaki’s. Hirohito, received a gift that reportedly de - ed in 1918 the Shokosha Watch Research Insti - When the fledgling watch manufacturer was I lighted him. The gift was from Kamekichi tute in Tokyo’s Totsuka district. Using Swiss ma - searching for a name for his product, he asked Yamazaki, a Tokyo jeweler, who had an ambi - chinery, Yamazaki and his team began experi - Goto for ideas. Goto suggested Citizen. A tion to manufacture pocket watches in Japan. menting in the production of pocket watches. watch is, to a great extent, a luxury item, he ex - The Japanese watch market at that time By the end of 1924, they began commercial plained, but Yamazaki was aiming to make af - was dominated by foreign makes, primarily production of their first product, the Caliber fordable watches. It was Goto’s hope that every Swiss brands, followed by Americans like 16 pocket watch, which they sold under the citizen would benefit from and enjoy the time - Waltham and Elgin. Yamazaki felt the time brand name Citizen. -
Clock Tower STEM in A
build a clock tower Are you ready to use the Engineering Design Process? Engineers follow this process when they’re creating new products or designing solutions to problems. It’s a set of steps that focuses on examining a problem, brainstorming solutions, and testing them out. Engineers don’t always follow the steps in perfect order, and they often repeat a step more than once before they reach a solution that works. The Goal: Solve a design problem by building a clock tower prototype. Paper what you need: Pen or pencil Glue or tape Scissors Cardboard or empty cereal boxes Any additional craft supplies you want to use (Examples: Popsicle sticks, straws, pipe cleaners, etc.) The Design challenge: You are a timekeeper whose job is to take care of your town’s clock tower. You have noticed that the tower has become shaky and there is a crack in the clock face. Create a design for a new clock tower that will be more sturdy. It should also have a clock face that you can remove in sections so that you can clean it. Build a clock tower with a clock face that can be removed in four sections without making the tower fall. build a clock tower CONt. design it Gather all of your materials and examine them. Think about how you might use each of them to build your clock tower. Architects draw blueprints of their buildings before they build them. A blueprint is a drawing of what you want your construction to look like, and it helps you plan how you are going to build something. -
The Clock Tower
Fondazione Musei Civici di Venezia — The Clock Tower ENG The Clock Tower The Clock Tower is one of the most famous architectural landmarks in Venice, standing over an arch that leads into what is the main shopping street of the city, the old Merceria. It marks both a juncture and a division between the various architectural components of St. Mark’s Square, which was not only the seat of political and religious power but also a public space and an area of economic activity, a zone that looked out towards the sea and also played a functional role as a hub for the entire layout of the city. In short, the Tower and its large Astronomical Clock, a masterpiece of technology and engineering, form an essential part of the very image of Venice. THE HISTORY As is known, the decision to erect a new public clock in the St. Mark’s area to replace the inadequate, old clock of Sant’Alipio on the north-west corner of the Basilica – which was by then going to rack and ruin – predates the decision as to where this new clock was to be placed. It was 1493 when the Senate commissioned Carlo Zuan Rainieri of Reggio Emilia to create a new clock, but the decision that this was to be erected over the entrance to the Merceria only came two years later. Procuratie Vechie and Bocha de According to Marin Sanudo, the following year “on 10 June work Marzaria began on the demolition of the houses at the entrance to the Merceria (…) to lay down the foundations for the most excellent clock”. -

Evolution of Clock Escapement Mechanisms
Miodrag Stoimenov Associate Professor Evolution of Clock Escapement University of Belgrade Faculty of Mechanical Engineering Mechanisms Branislav Popkonstantinović Associate Professor The paper presents and explains the evolution of details design of the clock University of Belgrade escapement mechanisms through the ages. As particularly significant, the Faculty of Mechanical Engineering following mechanisms are emphasized: the crown wheel (verge & foliot), Ljubomir Miladinović anchor recoil, deadbeat and detached escapements, and their variations – Associate Professor gravity and chronometer escapements, as well as the English and Swiss University of Belgrade lever watch escapements. All important geometrical, kinematical and Faculty of Mechanical Engineering dynamical properties and the influence of these properties on the clock Dragan Petrović accuracy are explained. Associate Professor University of Belgrade Keywords: clock, escapement, evolution, mechanism, lever. Faculty of Mechanical Engineering 1. INTRODUCTION oscillator with the restoring force and standardized pace. The crown wheel rate, acted upon by driving torque, is This work is aimed at a qualitative analysis of regulated only by the foliot inertia with a rather advancement in escapement mechanism structural unpredictable error. When the crown wheel is rotating, definition and development of a timepiece over the past the pallet of the verge is caught by one of the wheel’s seven centuries. This study cowers the following issues teeth, rotating the verge and a solid foliot in one a) the crown wheel, the verge and foliot, b) the recoil direction and leading to engagement of the opposite anchor escapement, c) deadbeat escapements, and d) tooth with the second pallet [4]. Due to the foliot inertia, detached escapements. Measure of the effectiveness in that next tooth stops the wheel’s motion, and the wheel the regulator horological properties could be specified with its eigen driving torque finally stops the rotation of as follows: a) the level of constructive and dynamic the foliot too. -

Mini Quartz Clock Movements
Mini Quartz Clock Movements • 10 Year Warranty • Step Second Hand • Dimensions: 2-1/8"W x 2-1/8"H x 5/8"D • Runs on 1 "AA" Size Battery • American "I" Shaft - Diameter 5/16" • Free Set Of Hands and • Front Loading Hanger Mounting Hardware With • Accurate Within 2 Minutes A Year Each Clock Movement • Fits 3" Diameter Hole • Made in USA 1. Drill a 3/8" hole through the material you are working with and insert the movement. 2. Slide brass washer over shaft. 3. Attach dial mounting hex nut. 4. Gently press hour hand onto shaft at 12:00 position. 5. Place minute hand over shaft at 12:00 position. 6. Gently screw minute nut in place. 7. Press on second hand at 12:00 position. 8. Screw on cap nut if no second hand is used. Mini Movements Shaft Length Selecting the Proper Shaft Length Dials B A P r i c e E a c h P e r P k g O f Proper shaft length is important to ensure Stock# up to Thread Total 1 3 10 50 100 sufficient clearance when going through your dial Q-11 1/8" thick 3/16" 17/32" 4.95 4.23 4.45 3.80 4.25 3.63 3.95 3.38 3.75 3.21 board and when using a glass front on your clock. Q-12 1/4" thick 5/16" 5/8" 4.95 4.23 4.45 3.80 4.25 3.63 3.95 3.38 3.75 3.21 Overall Length (A) is measured from the tip of Q-13 3/8" thick 7/16" 3/4" 4.95 4.See23 4.4 website5 3.80 4.25 3for.63 3current.95 3.38 3.75 3.21 the hand shaft to the movement cast. -

SETTING up and MOVING a PENDULUM CLOCK by Brian Loomes, UK
SETTING UP AND MOVING A PENDULUM CLOCK by Brian Loomes, UK oving a pendulum This problem may face clock with anchor the novice in two different Mescapement can ways. Firstly as a clock be difficult unless you have that runs well in its present a little guidance. Of all position but that you need these the longcase clock to move. Or as a clock is trickiest because the that is new to you and that long pendulum calls for you need to assemble greater care at setting it in and set going for the very balance, usually known as first time—such as one you have just inherited or bought at auction. If it is the first of these then you can attempt to ignore my notes about levelling. But floors in different rooms or different houses seldom agree Figure 1. When moving an on levels, and you may eight-day longcase clock you eventually have to follow need to hold the weight lines through the whole process in place by taping round the of setting the clock level accessible part of the barrel. In and in beat. a complicated musical clock, Sometimes you can such as this by Thomas Lister of persuade a clock to run by Halifax, it is vital. having it at a silly angle, or by pushing old pennies or wooden wedges under the seatboard. But this is hardly ideal and next time you move the clock you start with the same performance all over again. setting it ‘in beat’. These My suggestion is that you notes deal principally with bite the bullet right away longcase clocks. -

Holy Coverings in the Tareq Rajab Museum the Origin of the Tradition of Covering the Ka'aba with Cloth Is Lost In
About the journal Contents 02 18 April 2011 The Journey to the Centre Aly Gabr 09 9 May 2011 China and the Islamic World: The evidence of 12th and 13th century Northern Syria Martine Muller-Weiner 22 26 September 2011 Holy Coverings in the Tareq Rajab Museum Ziad T Alsayed Rajab 27 17 October 2011 A Brief History of the Ismaili D’awa Adel Salem al-Abdul Jader 31 28 November 2011 The Kingdom of Saba: Current Research by the German Archaeological Institute in South Arabia (Yemen) Iris Gerlach 38 5 December 2011 The Oriental Pearl in the Maritime Trade Annie Montigny 43 13 December 2011 Raili and Reima Pietilä Jarno Paltonen 49 9 January 2012 Islamic Heritage in Bosnia and Herzegovina Kenan Musić This publication is sponsored in part by: LNS 1785 J Fabricated from gold, worked in kundan technique and set with rubies and emeralds Height 9 mm; diameter 100 mm India, Mughal, c. 1st quarter 17th century AD Hadeeth ad-Dar 1 Volume 37 The Journey to the Centre be performed in congregation in a mosque although as opposed to a physical one, meaning that he the whole earth that we know is a potential place for employed his intuition with what he dealt with. the performance of that daily activity. This notion He saw himself as a tripartite being composed of makes the earth a potential vast mosque. body (jism), soul (nafs), and spirit (rouh). Without the union of these three parts he believed he/ I am sure that the question arises in some of she would be demeaned in his/her existence and your minds: does God really expects us to show unbalanced. -
Checking for Proper Drop/Lock in the Swiss Lever Escapement
w I • w <( LLJ 0 z c 1- m ~ :::J LLI Ul 11. ~ 1- ::J ::J z 0 <( [J I z 0 w :::: w 0:: w c:: w I I l.L f- m LLI 1- w 0 z I J: z 0:: 1- 1- 0 o_ 0 HoROLOGICAL'" HoROLOGICALTM TIMES Official Publication of the American Watchmakers-Ciockmakers Institute TIMES EDITORIAL & EXECUTIVE OFFICES VOLUME 31, NUMBER 4, APRIL 2007 American Watchmakers-Ciockmakers Institute (AWCI) 701 Enterprise Drive, Harrison, OH 45030 Phone: Toll Free 1-866-FOR-AWCI (367-2924) or (513)367-9800 FEATURE ARTICLES Fax: (513)367-1414 E-mail: [email protected] 6 Patek Philippe 10-Day Tourbillon, By Ron DeCorte Website: www.awci.com 16 Checking for Proper Drop/Lock in the Swiss Lever Office Hours: Monday-Friday 8:00AM to 5:00 PM (EST) Escapement, By John Davis Closed National Holidays 22 ETACHRON, Part 2, By Manuel Yazijian Donna K. Baas: Managing Editor, Advertising Manager Katherine J. Ortt: Associate Editor, Layout/Design Associate DEPARTMENTS James E. Lubic, CMW: Executive Director Education &Technical Director 2 President's Message, By Dennis Warner Lucy Fuleki: Assistant Executive Director Thomas J. Pack, CPA: Finance Director 2 Executive Director's Message, By James E. Lubic Laurie Penman: Clock Instructor 4 Questions & Answers, By David A. Christianson Manuel Yazijian, CMW: Watchmaking Instructor Certification Coordinator 26 From the Workshop, By Jack Kurdzionak Nancy L. Wellmann: Education Coordinator Sharon McManus: Membership Coordinator 31 AWCI Material Search Heather Weaver: Receptionist/Secretary 32 Affiliate Chapter Report, By Wes Cutter Jim Meyer: IT Director 35 AWCI New Members HOROLOG/CAL TIMES ADVISORY COMMITTEE Ron Iverson, CMC: Chairman 39 Bulletin Board Karel Ebenstreit, CMW 42 Industry News Jeffrey Hess Chip Lim, CMW, CMC, CMEW 44 Classified Advertising E-mail: [email protected] 48 Advertisers' Index AWCI OFFICERS Dennis J. -

Mechanical Parts of Clocks Or Watches in General
G04B CPC COOPERATIVE PATENT CLASSIFICATION G PHYSICS (NOTES omitted) INSTRUMENTS G04 HOROLOGY G04B MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS (spring- or weight-driven mechanisms in general F03G; electromechanical clocks or watches G04C; electromechanical clocks with attached or built- in means operating any device at pre-selected times or after predetermined time intervals G04C 23/00; clocks or watches with stop devices G04F 7/08) NOTE This subclass covers mechanically-driven clocks or clockwork calendars, and the mechanical part of such clocks or calendars. WARNING In this subclass non-limiting references (in the sense of paragraph 39 of the Guide to the IPC) may still be displayed in the scheme. Driving mechanisms 1/145 . {Composition and manufacture of the springs (compositions and manufacture of 1/00 Driving mechanisms {(driving mechanisms for components, wheels, spindles, pivots, or the Turkish time G04B 19/22; driving mechanisms like G04B 13/026; compositions of component in the hands G04B 45/043; driving mechanisms escapements G04B 15/14; composition and for phonographic apparatus G11B 19/00; springs, manufacture or hairsprings G04B 17/066; driving weight engines F03G; driving mechanisms compensation for the effects of variations of for cinematography G03B 1/00; driving mechnisms; temperature of springs using alloys, especially driving mechanisms for time fuses for missiles F42C; for hairsprings G04B 17/227; materials for driving mechnisms for toys A63H 29/00)} bearings of clockworks G04B 31/00; iron and 1/02 . with driving weight steel alloys C22C; heat treatment and chemical 1/04 .