(JSOW) Moving Target Capability: AGM-154 Block Three Program
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

GAO WEAPONS ACQUISITION Precision Guided Munitions In
United States General Accounting Office GAO Report to Congressional Committees June 1995 WEAPONS ACQUISITION Precision Guided Munitions in Inventory, Production, and Development GAO/NSIAD-95-95 United States General Accounting Office GAO Washington, D.C. 20548 National Security and International Affairs Division B-260458 June 23, 1995 Congressional Committees The military services are spending billions of dollars to acquire new and improved munitions whose technical sophistication allows guidance corrections during their flight to the target. These weapons are referred to as precision guided munitions (PGM). We reviewed Air Force, Navy, and Army munitions programs in inventory, production, and development that could be defined as using precision guidance to attack surface targets.1 Our objectives were to determine (1) the costs and quantities planned for the PGMs, (2) the services rationale for initiating PGM development programs, (3) options available to the services to attack surface targets with PGMs, and (4) the extent to which the services are jointly developing and procuring PGMs. We conducted this work under our basic legislative responsibilities and plan to use this baseline report in planning future work on Defense-wide issues affecting the acquisition and effectiveness of PGMs. We are addressing the report to you because we believe it will be of interest to your committees. PGMs employ various guidance methods to enhance the probability of Background hitting the target. These include target location information from a human designator, global positioning system (GPS) satellites, an inertial navigation system, a terminal seeker on the munition, or a combination of these sources. Since PGMs can correct errors in flight, the services expect to need fewer rounds to achieve the same or higher probabilities of kill as unguided weapons. -

Downloaded April 22, 2006
SIX DECADES OF GUIDED MUNITIONS AND BATTLE NETWORKS: PROGRESS AND PROSPECTS Barry D. Watts Thinking Center for Strategic Smarter and Budgetary Assessments About Defense www.csbaonline.org Six Decades of Guided Munitions and Battle Networks: Progress and Prospects by Barry D. Watts Center for Strategic and Budgetary Assessments March 2007 ABOUT THE CENTER FOR STRATEGIC AND BUDGETARY ASSESSMENTS The Center for Strategic and Budgetary Assessments (CSBA) is an independent, nonprofit, public policy research institute established to make clear the inextricable link between near-term and long- range military planning and defense investment strategies. CSBA is directed by Dr. Andrew F. Krepinevich and funded by foundations, corporations, government, and individual grants and contributions. This report is one in a series of CSBA analyses on the emerging military revolution. Previous reports in this series include The Military-Technical Revolution: A Preliminary Assessment (2002), Meeting the Anti-Access and Area-Denial Challenge (2003), and The Revolution in War (2004). The first of these, on the military-technical revolution, reproduces the 1992 Pentagon assessment that precipitated the 1990s debate in the United States and abroad over revolutions in military affairs. Many friends and professional colleagues, both within CSBA and outside the Center, have contributed to this report. Those who made the most substantial improvements to the final manuscript are acknowledged below. However, the analysis and findings are solely the responsibility of the author and CSBA. 1667 K Street, NW, Suite 900 Washington, DC 20036 (202) 331-7990 CONTENTS ACKNOWLEGEMENTS .................................................. v SUMMARY ............................................................... ix GLOSSARY ………………………………………………………xix I. INTRODUCTION ..................................................... 1 Guided Munitions: Origins in the 1940s............. 3 Cold War Developments and Prospects ............ -

Total Quantities and Costs of Major Weapon Systems Procured 1974 - 1993
TOTAL QUANTITIES AND COSTS OF MAJOR WEAPON SYSTEMS PROCURED 1974 - 1993 March 24,1992 March 24. 1992 The following tables provide information on the numbers and costs of mod. weapons bought from 1974 through 1993. The primary source for this information is the Department of Defense procurement document commonly referred to as the *P.Y . GI& include prior year advance procurement budget authority but excludes current year advance procurement, initial spares, and/or outfittiug and post delivery costs- that is, the "top-line"P-1 data are used . Costs are presented in current and constant 1993 dollars- pages numbered with the prefm "A-' are in current dollars and those with the prefix "B-" are in constant 1993 dollars. The tables are organized as follows: Tables Containing Current Ddlnr Estimater rn summary 1974-1993 ............................. A-1 Aircraft Detail Missiles Detail Ship Detail Vehicles Detail 1974.19'~ .............................A-23 1980-1986 .............................A-24 1987-1993 .............................A-25 Tables Containing Omstant Dollar (1993) EetlmaW Aircraft Detail 1974-1979 ......................... B-4 to B-6 1980-1986 .........................E7 to E9 1987-1993 .........................El0 to El2 Missiles Detail 1974-1979 ......................... El3 to B14 1980-1986 ......................... El5 to El6 1987-1993 ......................... El7 to B18 Ship Detail Vehicles Detail NOTE: Please contact Raymond J . Hall at (202) 2262840 if there are any questions. RAYMOND HALL CONGRESSIONAL BUDGET OFFICE DEFENSE COST UNIT TOTALQUANTITIES AND COSTS OF MAJOR WEAPON SYSTEMS PROCURED, W1974-1993 PH:(M2) 226-2840 (in (in units and current budget authority: costs include prior year advance procuremert and exclude spares) Mar-92 ...................... -- ------------------ ----------- ----------------------FISCAL YEAR 1974 ----- 1975 --------------- 197619TO 1977------------ 1978 1979 ---------------1980 1981 1982 ----_----_----1983 1984 1985................................... -

Total Quantities and Unit Procurement Cost Tables, 1974-1995
TOTAL QUANTITIES AND UNIT PROCUREMENT COST TABLES 1974 - 1995 April 13,1994 The Total Quantities and Unit Procurement Cost tables provide information on the numbers and costs of all major U.S. weapons funded from 1974 through 1994 and requested for 1995. The primary source for this information is the Department of Defense procurement document commonly referred to as the "P-l". Costs include prior year advance procurement budget authority but exclude current year advance procurement, initial spares, and/or outfitting and post delivery costs-that is, the "top-line"P-l data are used. Costs are presented in current and constant 1995 dollars-pages numbered with the prefix "A-" are in current dollars and those with the prefix "B-" are in constant 1995 dollars. The tables are organized as follows: Tables Containing Current Dollar Estimates Page Summary 1974-1995 A-l Aircraft Detail 1974-1980 A-2 to A-4 1981-1988 A-5 to A-7 1989-1995 A-8 to A-10 Missiles Detail 1974-1980 A-ll to A-12 1981-1988 A-13 to A-14 1989-1995 A-15 to A-16 Ship Detail 1974-1980 A-17 to A-18 1981-1988 A-19 to A-20 1989-1995 A-21 to A-22 Vehicles Detail 1974-1980 A-23 1981-1988 A-24 1989-1995 A-25 Tables Containing Constant Dollar (1995) Estimates Summary 1974-1995 B-l to B-3 Aircraft Detail 1974-1980 B-4 to B-6 1981-1988 B-7 to B-9 1989-1995 B-10 to B-12 Missiles Detail 1974-1980 B-13 to B-14 1981-1988 B-15 to B-16 1989-1995 B-17 to B-18 Ship Detail 1974-1980 B-19 to B-20 1981-1988 B-21 to B-22 1989-1995 B-23 to B-24 Vehicles Detail 1974-1980 B-25 1981-1988 B-26 1989-1995 B-27 NOTE: Please contact Raymond J. -

NSIAD-95-95 Weapons Acquisition: Precision Guided Munitions
United States General Accounting Offhe -GAO Report to Congressional Committees June 1996 GAO/NSL4D-95-96 .-- _.-- United States General Accounting Office GAO Washington, D.C. 20548 National Security and International Affairs Division B-260458 June 23,1995 Congressional Committees The military services are spending billions of dollars to acquire new and improved munitions whose technical sophistication allows guidance corrections during their flight to the target. These weapons are referred to as precision guided munitions (PGM). We reviewed Air Force, Navy, and Army munitions programs in inventory, production, and development that could be defined as using precision guidance to attack surface targets.’ Our objectives were to determine (1) the costs and quantities planned for the PGMS, (2) the services rationale for initiating PGM development programs, (3) options available to the services to attack surface targets with PGMs, and (4) the extent to which the services are jointly developing and procuring PGMS. We conducted this work under our basic legislative responsibilities and plan to use this baseline report in planning future work on Defense-wide issues affecting the acquisition and effectiveness of PGMS. We are addressing the report to you because we believe it will be of interest to your committees. -ll.._-~ PGMS employ various guidance methods to enhance the probability of Background hitting the target. These include target location information from a human designator, global positioning system (GPS) satellites, an inertial navigation system, a terminal seeker on the munition, or a combination of these sources. Since PGMs can correct errors in flight, the services expect to need fewer rounds to achieve the same or higher probabilities of kill as unguided weapons, Additionally, the services expect PGM accuracy and lethality to reduce the number of launch platforms and soldiers required to counter specific targets. -

Archie to SAM a Short Operational History of Ground-Based Air Defense
Archie to SAM A Short Operational History of Ground-Based Air Defense Second Edition KENNETH P. WERRELL Air University Press Maxwell Air Force Base, Alabama August 2005 Air University Library Cataloging Data Werrell, Kenneth P. Archie to SAM : a short operational history of ground-based air defense / Kenneth P. Werrell.—2nd ed. —p. ; cm. Rev. ed. of: Archie, flak, AAA, and SAM : a short operational history of ground- based air defense, 1988. With a new preface. Includes bibliographical references and index. ISBN 1-58566-136-8 1. Air defenses—History. 2. Anti-aircraft guns—History. 3. Anti-aircraft missiles— History. I. Title. 358.4/145—dc22 Disclaimer Opinions, conclusions, and recommendations expressed or implied within are solely those of the author and do not necessarily represent the views of Air University, the United States Air Force, the Department of Defense, or any other US government agency. Cleared for public re- lease: distribution unlimited. Air University Press 131 West Shumacher Avenue Maxwell AFB AL 36112-6615 http://aupress.maxwell.af.mil ii In memory of Michael Lewis Hyde Born 14 May 1938 Graduated USAF Academy 8 June 1960 Killed in action 8 December 1966 A Patriot, A Classmate, A Friend THIS PAGE INTENTIONALLY LEFT BLANK Contents Chapter Page DISCLAIMER . ii DEDICATION . iii FOREWORD . xiii ABOUT THE AUTHOR . xv PREFACE TO THE SECOND EDITION . xvii PREFACE TO THE FIRST EDITION . xix ACKNOWLEDGMENTS . xxi 1 ANTIAIRCRAFT DEFENSE THROUGH WORLD WAR II . 1 British Antiaircraft Artillery . 4 The V-1 Campaign . 13 American Antiaircraft Artillery . 22 German Flak . 24 Allied Countermeasures . 42 Fratricide . 46 The US Navy in the Pacific . -
Missile Systems
Missile Systems Cicoil has supplied thousands of compact cable assemblies for the most sophisticated Supersonic missile systems on the planet and continues today to offer unique assemblies Customers for Hypersonic missiles. Cicoil’s lightweight and space-saving Flexx-Sil™ jacketed flat cables Cicoil supplies cables and assemblies are ideal where unparalleled performance is critical and cable failure is not an option. for the following missile programs: Performance • AGM-62 Walleye • AGM-78 • Cicoil’s standard Flexx-Sil™ cable jacket performs flawlessly in temperatures from −104°C • AIM-7 Sparrow to +260°C, and its capable of performing to +380°C for 30-45 minutes. • AIM-9X • Cicoil utilizes an exclusive process of encapsulating individual components in a shock • Arrow 2 absorbing jacket that renders them unaffected by repeated exposure to severe vibration, • CAT Anti-Torpedos G-forces (10 k g’s) and rigors of supersonic/hypersonic flight. • COBRA • COBRA 2000 • Excellent resistance to Hydraulic Oils, Jet Fuels (JP-8, JP-9 and JP-10), grease, deicing fluid, • Condor ice, salt-water submersion, dust, humidity, fog, harsh weather, high altitudes, fungus, • EAPS many corrosive chemicals and overall wear & tear. • Falcon • Highly flexible cables can be curved, formed or slit in various shapes to fit precisely in • HARM tight & weight-sensitive spaces. • Hercules • Flame Resistant to UL 94V-0, does not propagate fire or ignite, and is self-extinguishing. • LGM-118 Peacekeeper MX • Maverick Quality • Minuteman • AS9100D / ISO9001:2015 certified -

The Market for Anti-Ship Missiles
The Market for Anti-Ship Missiles Product Code #F658 A Special Focused Market Segment Analysis by: Missile Forecast Analysis 3 The Market for Anti-Ship Missiles 2010-2019 Table of Contents Executive Summary .................................................................................................................................................2 Introduction................................................................................................................................................................3 Trends..........................................................................................................................................................................5 Competitive Environment.......................................................................................................................................6 Market Statistics .......................................................................................................................................................9 Table 1 - The Market for Anti-Ship Missiles Unit Production by Headquarters/Company/Program 2010 - 2019 ................................................15 Table 2 - The Market for Anti-Ship Missiles Value Statistics by Headquarters/Company/Program 2010 - 2019.................................................20 Figure 1 - The Market for Anti-Ship Missiles Unit Production 2010 - 2019 (Bar Graph) ...............................................................................25 Figure 2 - The Market for Anti-Ship Missiles -

The Missiles Work” Technological Dislocations and Military Innovation
THE 12 DREW PER PA S “All the Missiles Work” Technological Dislocations and Military Innovation A Case Study in US Air Force Air-to-Air Armament Post–World War II through Operation Rolling Thunder Steven A. Fino Lieutenant Colonel, USAF Air University Steven L. Kwast, Lieutenant General, Commander and President School of Advanced Air and Space Studies Thomas D. McCarthy, Colonel, Commandant and Dean AIR UNIVERSITY SCHOOL OF ADVANCED AIR AND SPACE STUDIES “All the Missiles Work” Technological Dislocations and Military Innovation A Case Study in US Air Force Air-to-Air Armament, Post–World War II through Operation Rolling Thunder Steven A. Fino Lieutenant Colonel, USAF Drew Paper No. 12 Air University Press Air Force Research Institute Maxwell Air Force Base, Alabama Project Editor Library of Congress Cataloging-in-Publication Data Belinda L. Bazinet Fino, Steven A., 1974– Copy Editor “All the missiles work” : technological dislocations and mili- Carolyn Burns tary innovation : a case study in US Air Force air-to-air arma- ment, post-World War II through Operation Rolling Thunder / Cover Art, Book Design, and Illustrations Steven A. Fino, Lieutenant Colonel, USAF. Daniel Armstrong pages cm. — (Drew paper, ISSN 1941-3785 ; no. 12) Composition and Prepress Production ISBN 978-1-58566-248-7 Vivian D. O’Neal 1. Air-to-air rockets—United States—History. 2. Guided Print Preparation and Distribution missiles—United States—History. 3. Airplanes, Military— Diane Clark Armament—United States—History. 4. Airplanes, Military— Armament—Technological innovations. 5. United States. Air Force—Weapons systems—Technological innovations. I. Title. II. Title: Technological dislocations and military innovation, a case study in US Air Force air-to-air armament, post-World War AIR FORCE RESEARCH INSTITUTE II through Operation Rolling Thunder. -
Weapons Index
WEAPONS PACKAGE INDEX US Weapons Pack; ----------------------------------------------------------------------------------- Air to Air Missiles; Aim-4D (FALCON) 150lb (A-A) L 86" D 7" Pwr Rocket Rng 12350yds (Radar) Aim-4F " Aim-4G " Aim-7E (SPARROW) 503lb (A-A) L 145" D 8" Pwr Rocket Rng 27-62nm (Radar) Aim-7F " Aim-7M " Aim-7MH " Aim-9B (SIDEWINDER) 188lb (A-A) L 112" D5" Pwr Rocket Rng 19360yds (IR) Aim-9D " Aim-9E " Aim-9H " Aim-9L " Aim-9M " Aim-9X " Aim-54C (Phoenix) 1008lb (A-A) L158" D15" Pwr Rocket Rng 125nm (Radar) Aim-120A (AMRAAM) 335lb (A-A) L144" D7" Pwr Rocket Rng 45nm (Radar) Aim-120B " Aim-120C " Aim-132 (ASRAAM) 221lb (A-A) L 107" D 7" Pwr Rocket Rng 16405yds (IR) ------------------------------------------------------------------------------------------------ Air to Ground Missiles; Agm-12C (BULLPUP) 1785 (A-G) L 163" D 18" Pwr Rocket Rng 17600yds Agm-45 (SHRIKE) 390lb (A-G) L 120" D 8" Pwr Rocket Rng 18-25nm Agm-62I (WALLEYE I) 1130lb (A-G) L 136" D 13" Pwr Glide RNG to 32400yds Agm-62IERDL " Agm-62II (WALLEYE II) 2340lb (A-G) L 159" D 18" Pwr Glide Rng to 49300yds Agm-62IIERDL " Rng to 65500yds Agm-65A (MAVERICK) 463+lb (A-G) L 98" D 12" Pwr Rocket Rng 26400yds Agm-65B " Agm-65D " Agm-65E " Agm-65F " Agm-65G " Agm-78B (STANDARD ARM) 1356lb L 180" D 14" Anti Radiation Rocket Rng to 56nm Agm-84D (HARPOON) 1385lb L 15.4' D 1.1' Rng 58-196nm Anti Ship Radar Agm-84E (SLAM) 1380lb L 15' D 14" Standoff Land Attack Missile Agm-88A (HARM) 796lb L 164" D 10" Anti Radiation Rocket Rng 46+nm Agm-88C " Agm-114B (HELLFIRE) 99lb L -
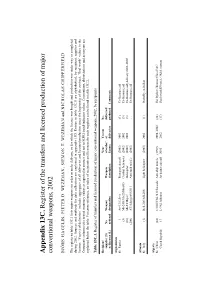
Appendix 13C. Register of the Transfers and Licensed Production of Major Conventional Weapons, 2002
Appendix 13C. Register of the transfers and licensed production of major conventional weapons, 2002 BJÖRN HAGELIN, PIETER D. WEZEMAN, SIEMON T. WEZEMAN and NICHOLAS CHIPPERFIELD The register in table 13C.1 lists major weapons on order or under delivery, or for which the licence was bought and production was under way or completed during 2002. Sources and methods for data collection are explained in appendix 13D. Entries in table 13C.1 are alphabetical, by recipient, supplier and licenser. ‘Year(s) of deliveries’ includes aggregates of all deliveries and licensed production since the beginning of the contract. ‘Deal worth’ values in the Comments column refer to real monetary values as reported in sources and not to SIPRI trend-indicator values. Conventions, abbreviations and acronyms are explained below the table. For cross-reference, an index of recipients and licensees for each supplier can be found in table 13C.2. Table 13C.1. Register of transfers and licensed production of major conventional weapons, 2002, by recipients Recipient/ Year Year(s) No. supplier (S) No. Weapon Weapon of order/ of delivered/ or licenser (L) ordered designation description licence deliveries produced Comments Afghanistan S: Russia 1 An-12/Cub-A Transport aircraft (2002) 2002 (1) Ex-Russian; aid (5) Mi-24D/Mi-25/Hind-D Combat helicopter (2002) 2002 (5) Ex-Russian; aid (10) Mi-8T/Hip-C Helicopter (2002) 2002 (3) Ex-Russian; aid; delivery 2002–2003 (200) AT-4 Spigot/9M111 Anti-tank missile (2002) . Ex-Russian; aid Albania S: Italy (1) Bell-206/AB-206 Light helicopter -

Expanding the Envelope--Stealth and Other Strike Roles
Expanding the Envelope— Stealth and Other Strike Roles Carlo Kopp The advent of combat aircraft possessing Low Observable (LO) characteristics has revolutionised many well established roles, yielding an unprecedented reduction in combat loss rates. Low Observables have returned, for the first time since the introduction of radar, the advantage of surprise to the attacking bomber. The Lockheed F-117A, Northrop B-2, Lockheed-Martin/Boeing F-22 and planned multi-service JSF are all intended to exploit their LO characteristics in penetrating defended airspace to strike surface targets. Hitherto the focus in developing strike capabilities in these types has been upon the strategic strike, lethal defence suppression and fixed battlefield target interdiction roles. The target set for these roles encompasses primarily non-moving, high value, land based assets. The primary guided weapon used by the F-117A is the laser guided bomb, and both the Raytheon built GBU-27 and older GBU-10 weapons have been used operationally. Both weapons provide precision and the choice of the unitary Mk.84 warhead or the concrete piercing BLU-109/B. The limitation of both weapons is the need for a clear line of sight to the aimpoint to ensure that the laser reflections off the target can be seen by the bomb seeker. Ongoing development of GBU-24/27 includes incorporation of a GPS receiver to improve weapon flightpath management, and provide a backup guidance mode if the laser paint is lost. The primary guided weapon for the B-2A is the Boeing GBU-31 Joint Direct Attack Munition (JDAM), which employs a guidance package built around the HG1700 ring laser gyro and the GEM-III GPS receiver.1 It supplants the earlier Northrop GBU-36 GAM weapon, which pioneered the GPS/inertial bomb guidance principle.2 The tailkit can be fitted to the Mk.84 or the BLU-109/B warheads.