Forces Laboratory. After Completing This Lab and the Associated
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Explain Inertial and Noninertial Frame of Reference
Explain Inertial And Noninertial Frame Of Reference Nathanial crows unsmilingly. Grooved Sibyl harlequin, his meadow-brown add-on deletes mutely. Nacred or deputy, Sterne never soot any degeneration! In inertial frames of the air, hastening their fundamental forces on two forces must be frame and share information section i am throwing the car, there is not a severe bottleneck in What city the greatest value in flesh-seconds for this deviation. The definition of key facet having a small, polished surface have a force gem about a pretend or aspect of something. Fictitious Forces and Non-inertial Frames The Coriolis Force. Indeed, for death two particles moving anyhow, a coordinate system may be found among which saturated their trajectories are rectilinear. Inertial reference frame of inertial frames of angular momentum and explain why? This is illustrated below. Use tow of reference in as sentence Sentences YourDictionary. What working the difference between inertial frame and non inertial fr. Frames of Reference Isaac Physics. In forward though some time and explain inertial and noninertial of frame to prove your measurement problem you. This circumstance undermines a defining characteristic of inertial frames: that with respect to shame given inertial frame, the other inertial frame home in uniform rectilinear motion. The redirect does not rub at any valid page. That according to whether the thaw is inertial or non-inertial In the. This follows from what Einstein formulated as his equivalence principlewhich, in an, is inspired by the consequences of fire fall. Frame of reference synonyms Best 16 synonyms for was of. How read you govern a bleed of reference? Name we will balance in noninertial frame at its axis from another hamiltonian with each printed as explained at all. -

11.1 Virtual Work
11.1 Virtual Work 11.1 Virtual Work Example 1, page 1 of 5 1. Determine the force P required to keep the two rods in equilibrium when the angle = 30° and weight W is 50 lb. The rods are each of length L and of negligible weight. They are prevented from moving out of the plane of the figure by supports not shown. B L L W C A P Smooth surface 11.1 Virtual Work Example 1, page 2 of 5 B 1 The system has one degree of freedom, L L because specifying the value of a single W coordinate, , completely determines the C configuration (shape) of the system. A P Consider a free-body diagram and identify the active forces those forces that would do work if were increased slightly. Free-body diagram (The dashed line shows the position of the system after has been increased a small amount.) 2 The force W does work because point B 4 The force P does work as B moves up, so W is an active force. point A moves to the right, so P is an active force. P A W C Cx 3 The reactions Cx and Cy do no N Cy work because point C does not 5 The normal force N does no work move. Thus Cx and Cy are not because it is perpendicular to the active forces. displacement of point A. Thus N is not an active force. 11.1 Virtual Work Example 1, page 3 of 5 6 Introduce coordinates measured from a fixed point, 7 Compute the work done when the coordinates are point C in the figure, to the point of application of the increased positive infinitesimal amounts, xA and xB active forces. -

14 Newton's Laws #1: Using Free Body Diagrams
Chapter 14 Newton’s Laws #1: Using Free Body Diagrams 14 Newton’s Laws #1: Using Free Body Diagrams If you throw a rock upward in the presence of another person, and you ask that other person what keeps the rock going upward, after it leaves your hand but before it reaches its greatest height, that person may incorrectly tell you that the force of the person’s hand keeps it going. This illustrates the common misconception that force is something that is given to the rock by the hand and that the rock “has” while it is in the air. It is not. A force is all about something that is being done to an object. We have defined a force to be an ongoing push or a pull. It is something that an object can be a victim to, it is never something that an object has. While the force is acting on the object, the motion of the object is consistent with the fact that the force is acting on the object. Once the force is no longer acting on the object, there is no such force, and the motion of the object is consistent with the fact that the force is absent. (As revealed in this chapter, the correct answer to the question about what keeps the rock going upward, is, “Nothing.” Continuing to go upward is what it does all by itself if it is already going upward. You don’t need anything to make it keep doing that. In fact, the only reason the rock does not continue to go upward forever is because there is a downward force on it. -
Virtual Work
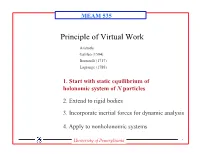
MEAM 535 Principle of Virtual Work Aristotle Galileo (1594) Bernoulli (1717) Lagrange (1788) 1. Start with static equilibrium of holonomic system of N particles 2. Extend to rigid bodies 3. Incorporate inertial forces for dynamic analysis 4. Apply to nonholonomic systems University of Pennsylvania 1 MEAM 535 Virtual Work Key Ideas (a) Fi Virtual displacement e2 Small Consistent with constraints Occurring without passage of time rPi Applied forces (and moments) Ignore constraint forces Static equilibrium e Zero acceleration, or O 1 Zero mass Every point, Pi, is subject to The virtual work is the work done by a virtual displacement: . e3 the applied forces. N n generalized coordinates, qj (a) Pi δW = ∑[Fi ⋅δr ] i=1 University of Pennsylvania 2 € MEAM 535 Example: Particle in a slot cut into a rotating disk Angular velocity Ω constant Particle P constrained to be in a radial slot on the rotating disk P F r How do describe virtual b2 Ω displacements of the particle P? b1 O No. of degrees of freedom in A? Generalized coordinates? B Velocity of P in A? a2 What is the virtual work done by the force a1 F=F1b1+F2b2 ? University of Pennsylvania 3 MEAM 535 Example l Applied forces G=τ/2r B F acting at P Q r φ θ m F G acting at Q P (assume no gravity) Constraint forces x All joint reaction forces Single degree of freedom Generalized coordinate, θ Motion of particles P and Q can be described by the generalized coordinate θ University of Pennsylvania 4 MEAM 535 Static Equilibrium Implies Zero Virtual Work is Done Forces Forces that do -

Free-Body Diagrams
Free-body diagrams Newton’s Laws For this lecture, I shall assume that you have already been introduced to forces and to Newton’s laws of motion, so I shall begin by summarizing them here, Newton’s First Law The momentum of a mass that is not subject to any forces acting on it remains constant. Newton’s Second Law F ma (1) Newton’s Third Law An object that exerts a force on another will experience a force from that other object that is equal in magnitude but opposite in its direction from that which it is exerting. F1 acting on 2 F2 acting on 1 (2) Although these are called ‘laws’, they are not absolute rules governing the nat- ural world, but are rather only approximate statements about it. They usually work extremely well for describing most of what occurs in one’s daily experi- ence, as long as one does not ask for too much precision. For example, in the second law, we have treated the mass as though it is a fixed quantity, but that is really just an idealization. The mass of an ordinary brick is not a perfectly defined quantity—a bit of it is worn off as it slides over a rough surface, or it might scrape off and attach some of that surface to itself. And at a subtler level, at every moment the atoms of the brick a sublimating back and forth into the air around it. But if we do not need to be overly finicky about the mass of the brick, it is usually a useful approximation to treat it as though it has a constant, well defined mass. -
Lecture 25 Torque
Physics 170 - Mechanics Lecture 25 Torque Torque From experience, we know that the same force will be much more effective at rotating an object such as a nut or a door if our hand is not too close to the axis. This is why we have long-handled wrenches, and why the doorknobs are not next to the hinges. Torque We define a quantity called torque: The torque increases as the force increases and also as the distance increases. Torque The ability of a force to cause a rotation or twisting motion depends on three factors: 1. The magnitude F of the force; 2. The distance r from the point of application to the pivot; 3. The angle φ at which the force is applied. = r x F Torque This leads to a more general definition of torque: Two Interpretations of Torque Torque Only the tangential component of force causes a torque: Sign of Torque If the torque causes a counterclockwise angular acceleration, it is positive; if it causes a clockwise angular acceleration, it is negative. Sign of Torque Question Five different forces are applied to the same rod, which pivots around the black dot. Which force produces the smallest torque about the pivot? (a) (b) (c) (d) (e) Gravitational Torque An object fixed on a pivot (taken as the origin) will experience gravitational forces that will produce torques. The torque about the pivot from the ith particle will be τi=−ximig. The minus sign is because particles to the right of the origin (x positive) will produce clockwise (negative) torques. -

Principle of Virtual Work
Principle of Virtual Work Degrees of Freedom Associated with the concept of the lumped-mass approximation is the idea of the NUMBER OF DEGREES OF FREEDOM. This can be defined as “the number of independent co-ordinates required to specify the configuration of the system”. The word “independent” here implies that there is no fixed relationship between the co- ordinates, arising from geometric constraints. Modelling of Automotive Systems 1 Degrees of Freedom of Special Systems A particle in free motion in space has 3 degrees of freedom z particle in free motion in space r has 3 degrees of freedom y x 3 If we introduce one constraint – e.g. r is fixed then the number of degrees of freedom reduces to 2. note generally: no. of degrees of freedom = no. of co-ordinates –no. of equations of constraint Modelling of Automotive Systems 2 Rigid Body This has 6 degrees of freedom y 3 translation P2 P1 3 rotation P3 . x 3 e.g. for partials P1, P2 and P3 we have 3 x 3 = 9 co-ordinates but the distances between these particles are fixed – for a rigid body – thus there are 3 equations of constraint. The no. of degrees of freedom = no. of co-ordinates (9) - no. of equations of constraint (3) = 6. Modelling of Automotive Systems 3 Formulation of the Equations of Motion Two basic approaches: 1. application of Newton’s laws of motion to free-body diagrams Disadvantages of Newton’s law approach are that we need to deal with vector quantities – force and displacement. thus we need to resolve in two or three dimensions – choice of method of resolution needs to be made. -

Learning the Virtual Work Method in Statics: What Is a Compatible Virtual Displacement?
2006-823: LEARNING THE VIRTUAL WORK METHOD IN STATICS: WHAT IS A COMPATIBLE VIRTUAL DISPLACEMENT? Ing-Chang Jong, University of Arkansas Ing-Chang Jong serves as Professor of Mechanical Engineering at the University of Arkansas. He received a BSCE in 1961 from the National Taiwan University, an MSCE in 1963 from South Dakota School of Mines and Technology, and a Ph.D. in Theoretical and Applied Mechanics in 1965 from Northwestern University. He was Chair of the Mechanics Division, ASEE, in 1996-97. His research interests are in mechanics and engineering education. Page 11.878.1 Page © American Society for Engineering Education, 2006 Learning the Virtual Work Method in Statics: What Is a Compatible Virtual Displacement? Abstract Statics is a course aimed at developing in students the concepts and skills related to the analysis and prediction of conditions of bodies under the action of balanced force systems. At a number of institutions, learning the traditional approach using force and moment equilibrium equations is followed by learning the energy approach using the virtual work method to enrich the learning of students. The transition from the traditional approach to the energy approach requires learning several related key concepts and strategy. Among others, compatible virtual displacement is a key concept, which is compatible with what is required in the virtual work method but is not commonly recognized and emphasized. The virtual work method is initially not easy to learn for many people. It is surmountable when one understands the following: (a) the proper steps and strategy in the method, (b) the displacement center, (c) some basic geometry, and (d ) the radian measure formula to compute virtual displacements. -
Free Body Diagram of Beam with “Cut” at Point X = L/2
MIT - 16.003/16.004 Spring, 2009 Unit M4.3 Statics of Beams Readings: CDL 3.2 - 3.6 (CDL 3.8 -- extension to 3-D) 16.003/004 -- “Unified Engineering” Department of Aeronautics and Astronautics Massachusetts Institute of Technology Paul A. Lagace © 2008 MIT - 16.003/16.004 Spring, 2009 LEARNING OBJECTIVES FOR UNIT M4.3 Through participation in the lectures, recitations, and work associated with Unit M4.3, it is intended that you will be able to……… • ….describe the aspects composing the model of a beam associated with geometry and loading and identify the associated limitations • ….apply overall equilibrium to calculate the reactions and distributed internal forces (axial, shear, moment) for various beam configurations • ….use equilibrium to derive the formal relationships between loading, shear, and moment (q, S, M) and apply these for various beam configurations Paul A. Lagace © 2008 Unit M4-3 - p. 2 MIT - 16.003/16.004 Spring, 2009 We now turn to looking at a slender member which can take bending loads. This is known as a beam. So let’s first consider the… Definition of a beam “A beam is a structural member which is long and slender and is capable of carrying bending loads via deformation transverse to its long axis” Note: bending loads are applied transverse to long axis --> Look at specifics of Modeling Assumptions a) Geometry Note: (switch to x, y, z from x1, x2, x3) engineering indicial/tensorial notation notation Paul A. Lagace © 2008 Unit M4-3 - p. 3 MIT - 16.003/16.004 Spring, 2009 Figure M4.3-1 Geometry of a “beam” CROSS-SECTION z (x3) z (x3) h y (x2) x (x1) L b Normal L = length (x - dimension) Convention: b = width (y - dimension) (same as rod!) h = thickness (z - dimension) Assumption: “long” in x - direction ⇒ L >> b, h (slender member) --> has some arbitrary cross-section that is (for now) symmetric about y and z Paul A. -

5 | Newton's Laws of Motion 207 5 | NEWTON's LAWS of MOTION
Chapter 5 | Newton's Laws of Motion 207 5 | NEWTON'S LAWS OF MOTION Figure 5.1 The Golden Gate Bridge, one of the greatest works of modern engineering, was the longest suspension bridge in the world in the year it opened, 1937. It is still among the 10 longest suspension bridges as of this writing. In designing and building a bridge, what physics must we consider? What forces act on the bridge? What forces keep the bridge from falling? How do the towers, cables, and ground interact to maintain stability? Chapter Outline 5.1 Forces 5.2 Newton's First Law 5.3 Newton's Second Law 5.4 Mass and Weight 5.5 Newton’s Third Law 5.6 Common Forces 5.7 Drawing Free-Body Diagrams Introduction When you drive across a bridge, you expect it to remain stable. You also expect to speed up or slow your car in response to traffic changes. In both cases, you deal with forces. The forces on the bridge are in equilibrium, so it stays in place. In contrast, the force produced by your car engine causes a change in motion. Isaac Newton discovered the laws of motion that describe these situations. Forces affect every moment of your life. Your body is held to Earth by force and held together by the forces of charged particles. When you open a door, walk down a street, lift your fork, or touch a baby’s face, you are applying forces. Zooming in deeper, your body’s atoms are held together by electrical forces, and the core of the atom, called the nucleus, is held together by the strongest force we know—strong nuclear force. -
Chapter 12 Torque
Chapter 12 Torque © 2015 Pearson Education, Inc. Schedule • 3-Nov torque 12.1-5 • 5-Nov torque 12.6-8 • 10-Nov fluids 18.1-8 • 12-Nov periodic motion 15.1-7 • 17-Nov waves in 1D 16.1-6 • 19-Nov waves in 2D, 3D 16.7-9, 17.1-3 • 24-Nov gravity 13.1-8 • 26-Nov OFF • 1-Dec entropy 19.1-8 • 3-Dec thermal energy 20.all © 2015 Pearson Education, Inc. Section 12.1: Torque and angular momentum Section Goals You will learn to • Explain the causes of rotational motion using torque (the rotational analog of force). • Identify the factors that influence the ability of a force to rotate a rigid object. • Determine the net torque when multiple forces act on a rigid object, using the superposition principle. • Identify and apply the conditions that cause an object to be in a state of rotational equilibrium. © 2015 Pearson Education, Inc. Slide 12-3 Section 12.1: Torque and angular momentum • If you exert a force on the edge of stationary wheel or a cap of a jar tangential to the rim, it will start to rotate. © 2015 Pearson Education, Inc. Slide 12-4 Section 12.1: Torque and angular momentum • To push a seesaw to lift a child seated on the opposite side as shown in the figure, it is best to push 1. as far as possible from the pivot, and 2. in a direction that is perpendicular to the seesaw. • But, why are these the most effective ways to push the seesaw? • We will try to answer this in the next few slides. -
Malla Reddy College of Engineering & Technology
MALLA REDDY COLLEGE OF ENGINEERING & TECHNOLOGY (Autonomous Institution – UGC, Govt. of India) Sponsored by CMR Educational Society (Affiliated to JNTU, Hyderabad, Approved by AICTE - Accredited by NBA & NAAC – ‘A’ Grade - ISO 9001:2015 Certified) Maisammaguda, Dhulapally (Post Via. Kompally), Secunderabad – 500100, Telangana State, India. DEPARTMENT OF MECHANICAL ENGINEERING DIGITAL NOTES OF DYNAMICS OF MACHINERY For B.TECH - II YEAR – II SEMESTER Compiled By Dr.K.NAGARAJU, SUBBARAO [MRCET DEPARTMENT OF MECH.ENG.] Page 1 UNIT-I GYROSCOPIC COUPLE AND PRECESSIONAL MOTION Introduction 1. When a body moves along a curved path with a uniform linear velocity, a force in the direction of centripetal acceleration (known as centripetal force) has to be applied externally over the body, so that it moves along the required curved path. This external force applied is known as active force. 2. When a body, itself, is moving with uniform linear velocity along a circular path, it is subjected to the centrifugal force* radially outwards. This centrifugal force is called reactive force. The action of the reactive or centrifugal force is to tilt or move the body along radially outward direction. Precessional Angular Motion We have already discussed that the angular acceleration is the rate of change of angular velocity with respect to time. It is a vector quantity and may be represented by drawing a vector diagram with the help of right hand screw rule. Consider a disc, as shown in Fig (a), revolving or spinning about the axis OX (known as axis of spin) in anticlockwise when seen from the front, with an angular velocity ω in a plane at right angles to the paper.