South Skye Seas Initiative Underwater & Shoreline Monitoring Project
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Walks and Scrambles in the Highlands
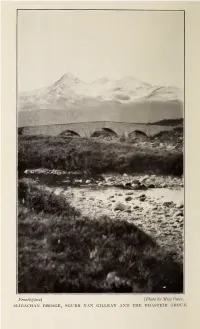
Frontispiece} [Photo by Miss Omtes, SLIGACHAN BRIDGE, SGURR NAN GILLEAN AND THE BHASTEIR GROUP. WALKS AND SCRAMBLES IN THE HIGHLANDS. BY ARTHUR L. BAGLEY. WITH TWELVE ILLUSTRATIONS. Xon&on SKEFFINGTON & SON 34 SOUTHAMPTON STREET, STRAND, W.C. PUBLISHERS TO HIS MAJESTY THE KING I9H Richard Clav & Sons, Limiteu, brunswick street, stamford street s.e., and bungay, suffolk UNiVERi. CONTENTS BEN CRUACHAN ..... II CAIRNGORM AND BEN MUICH DHUI 9 III BRAERIACH AND CAIRN TOUL 18 IV THE LARIG GHRU 26 V A HIGHLAND SUNSET .... 33 VI SLIOCH 39 VII BEN EAY 47 VIII LIATHACH ; AN ABORTIVE ATTEMPT 56 IX GLEN TULACHA 64 X SGURR NAN GILLEAN, BY THE PINNACLES 7i XI BRUACH NA FRITHE .... 79 XII THROUGH GLEN AFFRIC 83 XIII FROM GLEN SHIEL TO BROADFORD, BY KYLE RHEA 92 XIV BEINN NA CAILLEACH . 99 XV FROM BROADFORD TO SOAY . 106 v vi CONTENTS CHAF. PACE XVI GARSBHEINN AND SGURR NAN EAG, FROM SOAY II4 XVII THE BHASTEIR . .122 XVIII CLACH GLAS AND BLAVEN . 1 29 XIX FROM ELGOL TO GLEN BRITTLE OVER THE DUBHS 138 XX SGURR SGUMA1N, SGURR ALASDAIR, SGURR TEARLACH AND SGURR MHIC CHOINNICH . I47 XXI FROM THURSO TO DURNESS . -153 XXII FROM DURNESS TO INCHNADAMPH . 1 66 XXIII BEN MORE OF ASSYNT 1 74 XXIV SUILVEN 180 XXV SGURR DEARG AND SGURR NA BANACHDICH . 1 88 XXVI THE CIOCH 1 96 1 LIST OF ILLUSTRATIONS Toface page SLIGACHAN BRIDGE, SGURR NAN GILLEAN AND THE bhasteir group . Frontispiece BEN CRUACHAN, FROM NEAR DALMALLY . 4 LOCH AN EILEAN ....... 9 AMONG THE CAIRNGORMS ; THE LARIG GHRU IN THE DISTANCE . -31 VIEW OF SKYE, FROM NEAR KYLE OF LOCH ALSH . -

Skye: a Landscape Fashioned by Geology
SCOTTISH NATURAL SKYE HERITAGE A LANDSCAPE FASHIONED BY GEOLOGY SKYE A LANDSCAPE FASHIONED BY GEOLOGY SCOTTISH NATURAL HERITAGE Scottish Natural Heritage 2006 ISBN 1 85397 026 3 A CIP record is held at the British Library Acknowledgements Authors: David Stephenson, Jon Merritt, BGS Series editor: Alan McKirdy, SNH. Photography BGS 7, 8 bottom, 10 top left, 10 bottom right, 15 right, 17 top right,19 bottom right, C.H. Emeleus 12 bottom, L. Gill/SNH 4, 6 bottom, 11 bottom, 12 top left, 18, J.G. Hudson 9 top left, 9 top right, back cover P&A Macdonald 12 top right, A.A. McMillan 14 middle, 15 left, 19 bottom left, J.W.Merritt 6 top, 11 top, 16, 17 top left, 17 bottom, 17 middle, 19 top, S. Robertson 8 top, I. Sarjeant 9 bottom, D.Stephenson front cover, 5, 14 top, 14 bottom. Photographs by Photographic Unit, BGS Edinburgh may be purchased from Murchison House. Diagrams and other information on glacial and post-glacial features are reproduced from published work by C.K. Ballantyne (p18), D.I. Benn (p16), J.J. Lowe and M.J.C. Walker. Further copies of this booklet and other publications can be obtained from: The Publications Section, Cover image: Scottish Natural Heritage, Pinnacle Ridge, Sgurr Nan Gillean, Cullin; gabbro carved by glaciers. Battleby, Redgorton, Perth PH1 3EW Back page image: Tel: 01783 444177 Fax: 01783 827411 Cannonball concretions in Mid Jurassic age sandstone, Valtos. SKYE A Landscape Fashioned by Geology by David Stephenson and Jon Merritt Trotternish from the south; trap landscape due to lavas dipping gently to the west Contents 1. -

The Misty Isle of Skye : Its Scenery, Its People, Its Story
THE LIBRARY OF THE UNIVERSITY OF CALIFORNIA LOS ANGELES c.'^.cjy- U^';' D Cfi < 2 H O THE MISTY ISLE OF SKYE ITS SCENERY, ITS PEOPLE, ITS STORY BY J. A. MACCULLOCH EDINBURGH AND LONDON OLIPHANT ANDERSON & FERRIER 1905 Jerusalem, Athens, and Rome, I would see them before I die ! But I'd rather not see any one of the three, 'Plan be exiled for ever from Skye ! " Lovest thou mountains great, Peaks to the clouds that soar, Corrie and fell where eagles dwell, And cataracts dash evermore? Lovest thou green grassy glades. By the sunshine sweetly kist, Murmuring waves, and echoing caves? Then go to the Isle of Mist." Sheriff Nicolson. DA 15 To MACLEOD OF MACLEOD, C.M.G. Dear MacLeod, It is fitting that I should dedicate this book to you. You have been interested in its making and in its publica- tion, and how fiattering that is to an author s vanity / And what chief is there who is so beloved of his clansmen all over the world as you, or whose fiame is such a household word in dear old Skye as is yours ? A book about Skye should recognise these things, and so I inscribe your name on this page. Your Sincere Friend, THE A UTHOR. 8G54S7 EXILED FROM SKYE. The sun shines on the ocean, And the heavens are bhie and high, But the clouds hang- grey and lowering O'er the misty Isle of Skye. I hear the blue-bird singing, And the starling's mellow cry, But t4eve the peewit's screaming In the distant Isle of Skye. -
Skye Estates N a H C R E M
JOHN MUIR TRUST FACTSHEET T SKYE ESTATES N A H C R E M E Sconser, Strathaird, Torrin K I M From Gharbh-bheinn looking down to Loch Ainort and the Sound of Raasay. Marsco and Red Cuillin on the left. KEY FACTS THE LAND The John Muir Trust land on Skye is east of the Black Cuillin Ridge, Sconser and between four sea lochs – Sligachan and Ainort to the north, Scavaig and Slapin to the south. It’s a landscape of strong features and also strong contrasts. High mountain slopes including Glamaig, Sgurr na Stri and Blà Bheinn rise from sea to summit without interruption. They are also seen rising from wide peatlands, as in Glen Sligachan, and against the croftland Torrin and coastal woods of Torrin and southern Strathaird. The hills themselves may be red and rounded (the Red Cuillin between Glamaig and Marsco) or black and jagged (Bla Bheinn and its Strathaird satellites), and there’s also white limestone that outcrops and is Torrin was acquired by the quarried at Torrin. John Muir Trust in 1991, Strathaird in 1994 and The area west of the Blà Bheinn– Clach Glas–Garbh-bheinn ridge, Sconser in 1997. including Coire Dubh, is as wild as any land in Britain. Its rugged Areas nature is enhanced by its remoteness and loneliness and the absence of roads, tracks and vehicles. Torrin 2225 ha (5500 acres), Strathaird 6500 ha (15,000 The west boundary of the JMT land runs through Loch Coruisk, in acres), Sconser 3400 ha (8400 the heart of the Black Cuillin and undoubtedly the most spectacular acres). -

Croft 13 Elgol
The Isle of Skye Estate Agency Portree Office: [email protected] The Isle of Skye Estate Agency 01478 612683 Kyle Office: [email protected] www.iosea.co.uk 01599 534555 Croft Tenancy 13, Elgol, Isle of Skye. IV49 9BL. Offers Over £75,000 6.94 acres (to be confirmed by title deed) Rural, loch and mountain views Popular location Located on both sides of township road Crofting township Ideal for those interested in crofting Description An exciting opportunity to purchase a sizeable croft tenancy extending to 6.94 acres or thereby (to be confirmed by title deeds) located in the beautiful crofting township of Elgol, with extensive views over rolling croft land and across Loch Slapin and the Cuillin Sound towards the Cuillin mountains beyond. The croft hosts areas on both sides of the township road with one being elevated and the other side rolling downward. The croft has access from the township road via a gate on each side and the boundary of the croft is clearly defined with fencing. Croft 13 Elgol would provide a rare opportunity to acquire a generous portion of croft land in a wonderful location and would be of interest to anyone interested in crofting or horticulture. **Please Note** The area on the plan which has been crossed through is decrofted and not included in the sale. There is a static caravan on site for which no current planning permission exists. This can be included within the sale if the potential purchaser is in agreement to take on the obligation to obtain planning permission. -

History of the Macleods with Genealogies of the Principal
*? 1 /mIB4» » ' Q oc i. &;::$ 23 j • or v HISTORY OF THE MACLEODS. INVERNESS: PRINTED AT THE "SCOTTISH HIGHLANDER" OFFICE. HISTORY TP MACLEODS WITH GENEALOGIES OF THE PRINCIPAL FAMILIES OF THE NAME. ALEXANDER MACKENZIE, F.S.A. Scot., AUTHOR OF "THE HISTORY AND GENEALOGIES OF THE CLAN MACKENZIE"; "THE HISTORY OF THE MACDONALDS AND LORDS OF THE ISLES;" "THE HISTORY OF THE CAMERON'S;" "THE HISTORY OF THE MATHESONS ; " "THE " PROPHECIES OF THE BRAHAN SEER ; " THE HISTORICAL TALES AND LEGENDS OF THE HIGHLANDS;" "THE HISTORY " OF THE HIGHLAND CLEARANCES;" " THE SOCIAL STATE OF THE ISLE OF SKYE IN 1882-83;" ETC., ETC. MURUS AHENEUS. INVERNESS: A. & W. MACKENZIE. MDCCCLXXXIX. J iBRARY J TO LACHLAN MACDONALD, ESQUIRE OF SKAEBOST, THE BEST LANDLORD IN THE HIGHLANDS. THIS HISTORY OF HIS MOTHER'S CLAN (Ann Macleod of Gesto) IS INSCRIBED BY THE AUTHOR. Digitized by the Internet Archive in 2012 with funding from National Library of Scotland http://archive.org/details/historyofmacleodOOmack PREFACE. -:o:- This volume completes my fifth Clan History, written and published during the last ten years, making altogether some two thousand two hundred and fifty pages of a class of literary work which, in every line, requires the most scrupulous and careful verification. This is in addition to about the same number, dealing with the traditions^ superstitions, general history, and social condition of the Highlands, and mostly prepared after business hours in the course of an active private and public life, including my editorial labours in connection with the Celtic Maga- zine and the Scottish Highlander. This is far more than has ever been written by any author born north of the Grampians and whatever may be said ; about the quality of these productions, two agreeable facts may be stated regarding them. -
Sconser, Strathaird and Torrin Management Plan 2020-2022
Vision To safeguard the Estates’ wild landscape for current and future generations to enjoy, and for the benefit of the rich diversity of wildlife it supports. The Trust seeks to work in close co- operation with its’ crofting tenants, neighbours and partners to engage in collaborative projects that contribute to the wellbeing of the local community, encourage people to enjoy wild places, and enhances biodiversity. Key objectives (with link to John Muir Trust Corporate Strategy Priorities in italics) 1. Promote participation in the John Muir Award and volunteering on the property (IC06; 3&9) & (IC16; 1,3&10) 2. Involve the local community in the Estate’s management and through engagement work (IC09; 4&8) 3. Provide interpretation, information and opportunities for the local community and visitors to engage more broadly with the property and the Trust’s work (IC11; 1,9&10) 4. Use the property as a platform to enable Partnership working and pursuit of joint projects with local organisations and initiatives (IC17; 2,4&5) 5. Work to restore natural processes, particularly those that will contribute towards the protection and management of designated features (RR01; 10,11&12) 6. Expand native woodland on the property, including the restoration of natural treelines (RR02; 10&12) 7. Engagement in partnerships to facilitate path restoration and repair, habitat and landscape enhancement (RR03; 9,11&12) Facts and figures Size and tenure: The three estates owned by the Trust on Skye total 12,044 hectares, divided as follows; - Sconser Estate: 3,400 ha, of which 2,019 ha are under crofting tenure - Torrin Estate: 2,283 ha, the entirety of which is under crofting tenure - Strathaird Estates: 6,361 ha of which 1,295 ha is under crofting tenure Mineral rights: - Strathaird & Sconser Estates: Mineral rights lie with the Trust - Torrin Estate: Mineral lease held over the entire estate, excluding the Horse Park (rights reserved to Lord MacDonald), which expires 28th May 2024. -

Ichthyosaurs from the Jurassic of Skye, Scotland
Research article Scottish Journal of Geology Published Online First doi:10.1144/sjg2014-018 Ichthyosaurs from the Jurassic of Skye, Scotland Stephen L. Brusatte1, 2*, Mark T. Young1, 3, Thomas J. Challands1, Neil D. L. Clark4, #, Valentin Fischer5, #, Nicholas C. Fraser1, 2, #, Jeff J. Liston2, 6, 7, #, Colin C. J. MacFadyen8, #, Dugald A. Ross9, #, Stig Walsh1, 2, # & Mark Wilkinson1, # 1 School of GeoSciences, University of Edinburgh, Grant Institute, the King’s Buildings, James Hutton Road, Edinburgh EH9 3FE, UK 2 National Museums Scotland, Chambers Street, Edinburgh EH1 1JF, UK 3 School of Ocean and Earth Science, National Oceanography Centre, University of Southampton, Southampton SO14 3ZH, UK 4 The Hunterian Museum, University of Glasgow, University Avenue, Glasgow G12 8QQ, UK 5 Geology Department, University of Liege, B18 Allée du Six Août, 4000 Liège, Belgium 6 Yunnan Key Laboratory for Palaeobiology, Yunnan University, Kunming, People’s Republic of China 7 Institute of Biodiversity, Animal Health and Comparative Medicine, College of Medical, Veterinary and Life Sciences, University of Glasgow, Glasgow G12 8QQ, UK 8 Scottish Natural Heritage, Silvan House, 231 Corstorphine Road, Edinburgh EH12 7AT, UK 9 Staffin Museum, 6 Ellishadder, Staffin, Isle of Skye IV51 9JE, UK # Authors listed alphabetically * Correspondence: [email protected] Abstract: Fossils of Mesozoic vertebrates are rare in Scotland, particularly specimens of marine reptiles such as plesiosaurs and ichthyosaurs. We describe a suite of ichthyosaur fossils from the Early to Middle Jurassic of Skye, which to our knowl- edge are the first ichthyosaurs from Scotland to be described and figured in detail. These fossils span approximately 30 mil- lion years, from the Sinemurian to the Bathonian, and indicate that ichthyosaurs were a major component of Scottish marine faunas during this time. -

The Isle of Skye & Lochalsh
EXPLORE 2020-2021 the isle of skye & lochalsh an t-eilean sgitheanach & loch aillse visitscotland.com Contents 2 Skye & Lochalsh at a glance 4 Amazing activities 6 Great outdoors The Cuillin Hills Hotel is set within fifteen acres of private grounds 8 Touching the past over looking Portree Harbour and the Cuillin Mountain range. 10 Arts, crafts and culture Located on the famous Isle of Skye, you can enjoy one of the finest 12 Natural larder 14 Year of Coasts most spectacular views from any hotel in Scotland. and Waters 2020 16 What’s on 18 Travel tips Welcome to… 20 Practical information 24 Places to visit the isle of 36 Leisure activities skye & lochalsh 41 Shopping Fàilte don at t-eilean 46 Food & drink sgitheanach & loch aillse 55 Tours 59 Transport 61 Events & festivals Are you ready for an island adventure unlike any other? The Isle of Skye and the area of Lochalsh (the part of mainland just to the east of Skye) is 61 Local services a dramatic landscape with miles of beautiful coastline, soaring mountain 62 Accommodation ranges, amazing wildlife and friendly people. Come and be enchanted 68 Regional map by fascinating tales of its turbulent history in the ancient castles, defensive duns and tiny crofthouses, and take in some of the special events happening this year. Cover: The view from Elgol, Inspire your creative spirit on the Skye & Isle of Skye Lochalsh Arts & Crafts Trail (SLACA), cross the beautiful Skye Bridge and don’t miss Above image: Kilt Rock, the chance to sample the best local Isle of Skye produce from land and sea in our many Credits: © VisitScotland. -

A Long Walk on the Isle of Skye Information Pack
A Long Walk on the Isle of Skye Information Pack 1 A Long Walk on the Isle of Skye Information Pack I have the pleasure of enclosing the details of your self-guided A Long Walk on the Isle of Skye Walking Holiday with Macs Adventure. I am sure that you will find everything to your satisfaction, but should you have any further questions or comments please do not hesitate to contact us. Useful Contact Numbers & Websites Contact Telephone Website Macs Adventure 0141 530 8886 www.macsadventure.com (Office Hours – Mon – Fri 09:00 – 19:00, Sat 09:00 – 17:00) Macs Adventure 07500 718 081 (After Hours) Luggage Transfers 01471 844 338 Donald Nicolson Taxis Until Sligachan Hotel Luggage Transfers 01478 613000 Gus’ Taxis - Portree After Sligachan Hotel Emergencies 112 or 999 Police, Fire, Ambulance, Mountain Rescue. NHS Direct 0845 4647 http://www.nhsdirect.nhs.uk/ (For Health Advice and Reassurance 24 Hours a Day) Traveline Scotland 0870 608 2608 www.travelinescotland.com (Public transport Information, Journey planning and Timetables) Local Transport Fast Cabs – 01478 612200 Services Portree Stagecoach 0871 200 22 33 Timetable Info Tour Outline: A Long Walk on the Isle of Skye Duration: 7 Walking Days Distance: 73 Miles (117km) Short Description: A Long Walk on the Isle of Skye takes you through some of the most unique and inspiring scenery in Scotland. Accessing places that many tourists don’t get to see, this is a walk guaranteed to take your breath away. In both senses! Grade: Strenuous Style: Self guided Walking Holiday Accommodation: B&B’s, Inns, Guesthouses and Hotels. -

Parliament 2010 Dunvegan Programme • Dunvegan Taxis 01470 521560 (Within the Village)
Page 24 Dunvegan Programme General information in Dunvegan EMERGENCY INFORMATION Police and fire • The Emergency number for Ambulance, Police and Fire in the UK is 999. • 999 can be dialled from a mobile phone or telephone booth at no charge. Dunvegan programme 2010 Medical and dental emergencies • Regardless of your nationality or your home health care provider or insurance, if you A warm and hearty welcome! need ambulatory health care or advice you can call the National Health Service at Some of our Parliamentarians will be joining us after a memorable trip to Assynt, 08454 242424. others will be weary from the midges and mud of the North Room Group service project, but most of us will arrive “fresh” from many hours of travelling. FOR YOUR CONVENIENCE Whether you are a first-timer at Parliament or a practiced expert, you will find here • There are two “big” banks in the square in Portree: Halifax Bank of Scotland and Royal friends and family that you have never met before, but feel wonderfully familiar. It’s time Bank of Scotland. Both banks have 24 hour ATM machines. to take a deep breath and immerse yourself in the very large and complex world of the • In Dunvegan, cash withdrawals can be made from the Link ATM at Fasgadh (village MacLeods, discover our “Old and New Traditions”, and participate in the many food store) or possibly the Royal Bank of Scotland’s mobile banking unit. (If the educational and social activities at Parliament. mobile unit is available, hours will be posted at the Information Point. -

The Great Estuarine Group (Jurassic, Scotland)
Extract from The Palaeontology92 Newsletter The Great Estuarine Group (Jurassic, Scotland) John D. Hudson Newsletter 91 1 The Great Estuarine Group (Jurassic, Scotland) as a source of vertebrate fossils: some reminiscences and field trips When I started research at Cambridge in 1956 for my PhD on the Middle Jurassic rocks of the Inner Hebrides, I gave no thought to their potential for vertebrate palaeontology. I quickly became most interested in the Great Estuarine Series (see Hudson and Trewin 2003), as it was then known. Its palaeoenvironment was a challenge, especially as the ‘Estuarine Series’ in Yorkshire had recently been interpreted as largely deltaic. I knew I had to study its sedimentology and invertebrate fauna, as well as sorting out its stratigraphy, but I was entirely ignorant of vertebrates. At that time, invertebrates were taught in the Department of Geology in Cambridge, led by Bulman, and vertebrates in Zoology, led by Parrington (rumour had it that they didn’t get along). The Eigg plesiosaur The story began with Hugh Miller’s visits to Eigg in 1844 and 1845. He discovered plesiosaur bones, the first record of these marine reptiles from Scotland, and wrote enthusiastically about them in his Free Church journal, The Witness. His writings gained wider circulation in the posthumous publication of The Cruise of the Betsey in 1858 (see Hudson 2003). Miller was also remarkably prescient about the palaeoenvironment of what Judd later called the Great Estuarine Series, but while his writings were a great popular success they were largely ignored by later authors, presumably because they were not published in scientific journals.