DOTD Standards for GPS Data Collection Accuracy
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Standards and Guidelines for Cadastral Surveys Using GPS
Table of Contents Foreword ........................................................................................................................................ 3 Part One: Standards for Positional Accuracy ................................................................................ 4 Part Two: GPS Survey Guidelines ................................................................................................ 5 Section One: Field Data Acquisition Methods Section Two: Field Survey Operations and Procedures Cadastral Project Control Cadastral Measurements Section Three: Data Processing and Analysis Section Four: Project Documentation Appendix A: Definitions ............................................................................................................. 16 Appendix B: Computation of Accuracies ................................................................................... 18 Appendix C: References ............................................................................................................. 19 Attachment 1-2 Foreword These Standards and Guidelines provide guidance to the Government cadastral surveyor and other land surveyors in the use of Global Positioning System (GPS) technology to perform Public Land Survey System (PLSS) surveys of the Public Lands of the United States of America. Many sources were consulted during the preparation of this document. These sources included other GPS survey standards and guidelines, technical reports and manuals. Opinions and reviews were also sought from public and -
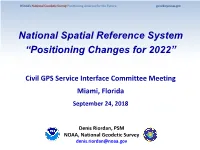
National Spatial Reference System: "Positioning Changes for 2022"
National Spatial Reference System “Positioning Changes for 2022” Civil GPS Service Interface Committee Meeting Miami, Florida September 24, 2018 Denis Riordan, PSM NOAA, National Geodetic Survey [email protected] U.S. Department of Commerce National Oceanic & Atmospheric Administration National Geodetic Survey Mission: To define, maintain & provide access to the National Spatial Reference System (NSRS) to meet our Nation’s economic, social & environmental needs National Spatial Reference System * Latitude * Scale * Longitude * Gravity * Height * Orientation & their variations in time U. S. Geometric Datums in 2022 National Spatial Reference System (NSRS) Improvements in the Horizontal Datums TIME NETWORK METHOD NETWORK SPAN ACCURACY OF REFERENCE NAD 27 1927-1986 10 meter (1 part in 100,000) TRAVERSE & TRIANGULATION - GROUND MARKS USED FOR NAD83(86) 1986-1990 1 meter REFERENCING (1 part THE in 100,000) NSRS. NAD83(199x)* 1990-2007 0.1 meter GPS B- orderBECOMES (1 part THE in MEANS 1 million) OF POSITIONING – STILL GRND MARKS. HARN A-order (1 part in 10 million) NAD83(2007) 2007 - 2011 0.01 meter 0.01 meter GPS – CORS STATIONS ARE MEANS (CORS) OF REFERENCE FOR THE NSRS. NAD83(2011) 2011 - 2022 0.01 meter 0.01 meter (CORS) NSRS Reference Basis Old Method - Ground Current Method - GNSS Stations Marks (Terrestrial) (CORS) Why Replace NAD83? • Datum based on best known information about the earth’s size and shape from the early 1980’s (45 years old), and the terrestrial survey data of the time. • NAD83 is NON-geocentric & hence inconsistent w/GNSS . • Necessary for agreement with future ubiquitous positioning of GNSS capability. Future Geometric (3-D) Reference Frame Blueprint for 2022: Part 1 – Geometric Datum • Replace NAD83 with new geometric reference frame – by 2022. -
Position Errors Caused by GPS Height of Instrument Blunders Thomas H
University of Connecticut OpenCommons@UConn Department of Natural Resources and the Thomas H. Meyer's Peer-reviewed Articles Environment July 2005 Position Errors Caused by GPS Height of Instrument Blunders Thomas H. Meyer University of Connecticut, [email protected] April Hiscox University of Connecticut Follow this and additional works at: https://opencommons.uconn.edu/thmeyer_articles Recommended Citation Meyer, Thomas H. and Hiscox, April, "Position Errors Caused by GPS Height of Instrument Blunders" (2005). Thomas H. Meyer's Peer-reviewed Articles. 4. https://opencommons.uconn.edu/thmeyer_articles/4 Survey Review, 38, 298 (October 2005) SURVEY REVIEW No.298 October 2005 Vol.38 CONTENTS (part) Position errors caused by GPS height of instrument blunders 262 T H Meyer and A L Hiscox This paper was published in the October 2005 issue of the UK journal, SURVEY REVIEW. This document is the copyright of CASLE. Requests to make copies should be made to the Editor, see www.surveyreview.org for contact details. The Commonwealth Association of Surveying and Land Economy does not necessarily endorse any opinions or recommendations made in an article, review, or extract contained in this Review nor do they necessarily represent CASLE policy CASLE 2005 261 Survey Review, 38, 298 (October 2005 POSITION ERRORS CAUSED BY GPS HEIGHT OF INSTRUMENT BLUNDERS POSITION ERRORS CAUSED BY GPS HEIGHT OF INSTRUMENT BLUNDERS T. H. Meyer and A. L. Hiscox Department of Natural Resources Management and Engineering University of Connecticut ABSTRACT Height of instrument (HI) blunders in GPS measurements cause position errors. These errors can be pure vertical, pure horizontal, or a mixture of both. -

UNIT-II GPS Systems:NAVSTAR-GLONAAS-Beidou-QZSS-IRNSS-GPS Receivers Based On: Data Type and Yield-Realization of Channels-Signal
UNIT-II GPS systems:NAVSTAR-GLONAAS-Beidou-QZSS-IRNSS-GPS receivers based on: Data type and yield-Realization of channels-Signal structure:Course Acquisition(code)-Carrier ranging and Navigational message Global Positioning System (GPS), originally Navstar GPS,[1] is a satellite-based radionavigation system owned by the United States government and operated by the United States Space Force.[2] It is one of the global navigation satellite systems (GNSS) that provides geolocation and time information to a GPS receiver anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites.[3] Obstacles such as mountains and buildings block the relatively weak GPS signals. The GPS does not require the user to transmit any data, and it operates independently of any telephonic or internet reception, though these technologies can enhance the usefulness of the GPS positioning information. The GPS provides critical positioning capabilities to military, civil, and commercial users around the world. The United States government created the system, maintains it, and makes it freely accessible to anyone with a GPS receiver.[4][better source needed] The GPS project was started by the U.S. Department of Defense in 1973, with the first prototype spacecraft launched in 1978 and the full constellation of 24 satellites operational in 1993. Originally limited to use by the United States military, civilian use was allowed from the 1980s following an executive order from President Ronald Reagan.[5] Advances in technology and new demands on the existing system have now led to efforts to modernize the GPS and implement the next generation of GPS Block IIIA satellites and Next Generation Operational Control System (OCX).[6] Announcements from Vice President Al Gore and the Clinton Administration in 1998 initiated these changes, which were authorized by the U.S. -

What Are Geodetic Survey Markers?
Part I Introduction to Geodetic Survey Markers, and the NGS / USPS Recovery Program Stf/C Greg Shay, JN-ACN United States Power Squadrons / America’s Boating Club Sponsor: USPS Cooperative Charting Committee Revision 5 - 2020 Part I - Topics Outline 1. USPS Geodetic Marker Program 2. What are Geodetic Markers 3. Marker Recovery & Reporting Steps 4. Coast Survey, NGS, and NOAA 5. Geodetic Datums & Control Types 6. How did Markers get Placed 7. Surveying Methods Used 8. The National Spatial Reference System 9. CORS Modernization Program Do you enjoy - Finding lost treasure? - the excitement of the hunt? - performing a valuable public service? - participating in friendly competition? - or just doing a really fun off-water activity? If yes , then participation in the USPS Geodetic Marker Recovery Program may be just the thing for you! The USPS Triangle and Civic Service Activities USPS Cooperative Charting / Geodetic Programs The Cooperative Charting Program (Nautical) and the Geodetic Marker Recovery Program (Land Based) are administered by the USPS Cooperative Charting Committee. USPS Cooperative Charting / Geodetic Program An agreement first executed between USPS and NOAA in 1963 The USPS Geodetic Program is a separate program from Nautical and was/is not part of the former Cooperative Charting agreement with NOAA. What are Geodetic Survey Markers? Geodetic markers are highly accurate surveying reference points established on the surface of the earth by local, state, and national agencies – mainly by the National Geodetic Survey (NGS). NGS maintains a database of all markers meeting certain criteria. Common Synonyms Mark for “Survey Marker” Marker Marker Station Note: the words “Geodetic”, Benchmark* “Survey” or Station “Geodetic Survey” Station Mark may precede each synonym. -

Gis Sections Proposal
COORDINATING WORKING PARTY ON FISHERY STATISTICS Sixth Meeting of the Aquaculture Subject Group (AS) and Twenty-seventh meeting of the Fisheries Subject Group (FS) GIS TECHNICAL WORKING GROUP FOR THE CWP HANDBOOK - GIS SECTIONS PROPOSAL Emmanuel Blondel (FAO) – [email protected] 1 CWP – AS 6th Session and FS 27th Session Rome, Italy – 15-16 May 2019 GIS Section Overview Title Definition / Scope Target Spatial reference systems Standards to use for handling a spatial reference system CWP Handbook (SRS) used with fisheries dataset. GIS Section Definitions; rationale; equivalent terminologies; recommended standard format & notations; use of Spatial Reference Identifiers (SRIDs); SRS use cases Geographic coordinates Standards for handling properly geographic coordinates CWP Handbook for reference shapes and fisheries datasets. GIS Section Definitions; rationale; recommended standard formats; Geographic coordinates use cases. Geographic classification Geographic classification and coding systems used for CWP Handbook and coding systems fisheries data. GIS Section General; Types of geographic classification systems (Irregular areas, grid reporting systems, Others); Main geographic Water main areas classification systems (FAO Major Fishing areas, Breakdown of major fishing areas; Geographic coding systems; Geographic information Standards format for data and metadata, and related CWP Data sharing formats & protocols standard protocols. and protocols/ Data formats and protocols; Metadata formats and protocols; Geospatial Section Geographic information Geographic information list of resources of interest for CWP Website resources of interest for CWP the CWP. Geographic information reference web-catalogues; GIS datasets of primary interest; 2 CWP – AS 6th Session and FS 27th Session Rome, Italy – 15-16 May 2019 GIS Section Overview • Handbook GIS Section proposal • Title: Geographic Dimension • Structure 1. -

Understanding Coordinate Systems and Map Projections (Pdf)
UNDERSTANDING COORDINATE SYSTEMS AND MAP PROJECTIONS PhD Evelyn Uuemaa The lecture is largely based on FOSS4G Academy Curriculum materials licensed under the Creative Commons Attribution 3.0 Unported License LEARNING OUTCOMES • Define the terms: • PCS • GCS • Projection method • Select the appropriate projection system based on a region of interest • Correctly project data sets to a new spatial reference system when needed. • Demonstrate an understanding that no matter how we project spherical data (3D) onto a plane (2D), there will be distortion. WHY DO YOU NEED TO KNOW THIS? • Spatial data – related to certain location • Globes are great for visualisation purposes, they are not practical for many uses, one reason being that they are not very portable • A round Earth does not fit without distortion on a flat piece of paper SPATIAL REFERENCE SYSTEM (SRS) OR COORDINATE REFERENCE SYSTEM (CRS) • Spatial Reference Systems, also referred to as Coordinate Systems, include two common types: Geographic Coordinate Sytems (GCS) Projected Coordinate Systems (PCS) • A Spatial Reference System Identifier (SRID) is a unique value used to unambiguously identify projected, unprojected, and local spatial coordinate system definitions. These coordinate systems form the heart of all GIS applications. (wiki) SPATIAL REFERENCE SYSTEM IDENTIFIER (SRID) • Virtually all major spatial vendors have created their own SRID implementation or refer to those of an authority, such as the European Petroleum Survey Group (EPSG). • SRIDs are the primary key for the Open Geospatial Consortium (OGC) spatial_ref_sys metadata table for the Simple Features for SQL Specification. • In spatially enabled databases (such as MySQL, PostGIS), SRIDs are used to uniquely identify the coordinate systems used to define columns of spatial data or individual spatial objects in a spatial column. -

IR 473 Selecting the Correct Datum, Coordinate System and Projection
internal RUQ report q22eqh22qheX eleting2the2orret dtumD2 oordinte system2nd2projetion for2north2eustrlin pplitions tfg2vowry perury2 PHHR WGS – AGD – GDA: Selecting the correct datum, coordinate system and projection for north Australian applications JBC Lowry Hydrological and Ecological Processes Program Environmental Research Institute of the Supervising Scientist GPO Box 461, Darwin NT 0801 February 2004 Registry File SG2001/0172 Contents Preface v Quick reference / Frequently Asked Questions vi What is a datum vi What is a projection vi What is a coordinate system vi What datum is used in Kakadu / Darwin / Northern Australia? vi What is WGS84 vi What do AGD, AMG, GDA and MGA stand for? vi Introduction 1 Projections , Datums and Coordinate Systems in Australia 1 Key differences between AGD / GDA 3 MetaData 6 Summary and Recommendations 7 References (and suggested reading) 8 Appendix 1 – Background to projections, datums and coordinate systems 10 Geodesy 10 Coordinate systems 11 Geographic Coordinate systems 11 Spheroids and datums 13 Geocentric datums 13 Local datums 13 Projected Coordinate systems 14 What is a map projection? 15 Example of map projection – UTM 19 Appendix 2 : Background information on the Australia Geodetic Datum and the Geocentric Datum 21 AGD 21 GDA 21 iii iv Preface The Supervising Scientist Division (SSD) undertakes a diverse range of activities for which the use, collection and maintenance of spatial data is an integral activity. These activities range from recording sample site locations with a global positioning system (GPS), through to the compilation and analysis of spatial datasets in a geographic information system (GIS), and the use of remotely sensed data, to simply reading a map. -

Mind the Gap! a New Positioning Reference
A new positioning reference Why is the United States adopting NATRF2022? What are we doing about this in Canada? We want to hear from you! • The Canadian Geodetic Survey and the United States • Improved compatibility with Global Navigation • The Canadian Geodetic Survey is working closely National Geodetic Survey have collaborated for Satellite Systems (GNSS), such as GPS, is driving this with the United States National Geodetic Survey in • Send us your comments, the challenges you over a century to provide the fundamental reference change. The geometric reference frames currently defining reference frames to ensure they will also foresee, and any concerns to help inform our path Mind the gap! systems for latitude, longitude and height for their used in Canada and the United States, although be suitable for Canada. forward to either of these organizations: respective countries. compatible with each other, are offset by 2.2 m from • Geodetic agencies from across Canada are A new positioning reference the Earth’s geocentre, whereas GNSS are geocentric. - Canadian Geodetic Survey: nrcan. • Together our reference systems have evolved collaborating on reference system improvements geodeticinformation-informationgeodesique. to meet today’s world of GPS and geographical • Real-time decimetre-level accuracies directly from through the Canadian Geodetic Reference System [email protected] NATRF2022 information systems, while supporting legacy datums GNSS satellites are expected to be available soon. Committee, a working committee of the Canadian -

Swath-Bathymetric-Mapping-2006
Swath-bathymetric mapping Steffen Gauger, Gerhard Kuhn, Thomas Feigl, Polina Lemenkova To cite this version: Steffen Gauger, Gerhard Kuhn, Thomas Feigl, Polina Lemenkova. Swath-bathymetric mapping. Ex- pedition ANTARKTIS-XXIII/4 of the research vessel ”Polarstern” in 2006, The Alfred Wegener In- stitute, Helmholtz Centre for Polar and Marine Research is located in Bremerhaven, Germany, 2007, Berichte zur Polar- und Meeresforschung = Reports on Polar and Marine Research, 557, pp.38-45. hal-02022076 HAL Id: hal-02022076 https://hal.archives-ouvertes.fr/hal-02022076 Submitted on 17 Feb 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons CC0 - Public Domain Dedication| 4.0 International License XX. SWATH-BATHYMETRIC MAPPING (S. Gauger, G. Kuhn, T. Feigl, P. Lemenkova) Objectives The main objective of the bathymetric working group was to perform high resolution multibeam surveys during the entire cruise for geomorphological interpretation, to locate geological sampling sites, to interpret magnetic and gravimetric measurements and to expand the world database for oceanic mapping. Precise depth measurements are the basis for creating high resolution models of the sea surface. The morphology of the seabed, interpreted from bathymetric models, gives information about the geological processes on the earth surface. -
OMB Circular No. A-16 Revised
OMB Circular No. A-16 Revised M-11-03, Issuance of OMB Circular A-16 Supplemental Guidance (November 10, 2010) (34 pages, 530 kb) August 19, 2002 TO THE HEADS OF EXECUTIVE DEPARTMENTS AND ESTABLISHMENTS SUBJECT: Coordination of Geographic Information and Related Spatial Data Activities This Circular provides direction for federal agencies that produce, maintain or use spatial data either directly or indirectly in the fulfillment of their mission. This Circular establishes a coordinated approach to electronically develop the National Spatial Data Infrastructure and establishes the Federal Geographic Data Committee (FGDC). The Circular has been revised from the 1990 version to reflect changes in technology, further describe the components of the National Spatial Data Infrastructure (NSDI), and assign agency roles and responsibilities for development of the NSDI. The revised Circular names the Deputy Director for Management of OMB as Vice-Chair of the Federal Geographic Data Committee. TABLE OF CONTENTS BACKGROUND 1. What is the purpose of this Circular? 2. What is the National Spatial Data Infrastructure (NSDI)? a. What is the vision of the NSDI? b. What are the components of the NSDI? (1) What is a data theme? (2) What are metadata? (3) What is the National Spatial Data Clearinghouse? (4) What is a standard? (5) How are NSDI standards developed? (6) What is the importance of collaborative partnerships? (7) What are the federal activities and technologies that support the NSDI? 3. What are the benefits of the NSDI? 4. What is the Federal Geographic Data Committee (FGDC)? a. What is the FGDC structure and membership? b. What are the FGDC procedures? POLICY 5. -

Web-Based Visualization of 3D Geospatial Data Using Java3d
Exploring Geovisualization Web-Based Visualization of 3D Geospatial Data Gobe Hobona, Philip James, and David Fairbairn Using Java3D University of Newcastle upon Tyne eb-based visualization of 3D geospatial tion for Standardization (ISO), which has adopted the Wdata has long been an area of research Simple Features model as the ISO19125 specification.4 within the geospatial information community. It’s a We’ve developed GeoDOVE, a Java3D-based prototype proven reliable and effective method for integrating het- system that retrieves geospatial data from conventional erogeneous data sets from different application domains spatial database servers, allows modification of the visu- and communicating the contents to the user. Early alization during runtime, and lets users remotely modi- research used the Virtual Reality Modeling Language fy attributes using the Structured Query Language (SQL). (VRML) for creating 2.5D and 3D virtual worlds. Since then, however, researchers have made significant GeoDOVE system architecture advances in geospatial information technology that could The current version of VRML⎯VRML97⎯offers two potentially help improve Web-based 3D geographic infor- approaches for linking a 3D model to external programs mation systems (GISs). For example, the geospatial infor- and data sources: mation community has standardized relational models for holding 3D spa- ■ script nodes and Spatial database servers allow tial data. Researchers have also made ■ the Java external authoring interface (EAI). for the storage and access of significant advances in the develop- 3D geospatial data using Open ment of spatial database engines Although the EAI provides a more flexible approach Geospatial Consortium such as MySQL (see http://www. to linking a VRML model to external programs than the standards.