General Overview of Continuum Mechanics – Jose Merodio and Anthony D.Rosato
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fluid Mechanics
FLUID MECHANICS PROF. DR. METİN GÜNER COMPILER ANKARA UNIVERSITY FACULTY OF AGRICULTURE DEPARTMENT OF AGRICULTURAL MACHINERY AND TECHNOLOGIES ENGINEERING 1 1. INTRODUCTION Mechanics is the oldest physical science that deals with both stationary and moving bodies under the influence of forces. Mechanics is divided into three groups: a) Mechanics of rigid bodies, b) Mechanics of deformable bodies, c) Fluid mechanics Fluid mechanics deals with the behavior of fluids at rest (fluid statics) or in motion (fluid dynamics), and the interaction of fluids with solids or other fluids at the boundaries (Fig.1.1.). Fluid mechanics is the branch of physics which involves the study of fluids (liquids, gases, and plasmas) and the forces on them. Fluid mechanics can be divided into two. a)Fluid Statics b)Fluid Dynamics Fluid statics or hydrostatics is the branch of fluid mechanics that studies fluids at rest. It embraces the study of the conditions under which fluids are at rest in stable equilibrium Hydrostatics is fundamental to hydraulics, the engineering of equipment for storing, transporting and using fluids. Hydrostatics offers physical explanations for many phenomena of everyday life, such as why atmospheric pressure changes with altitude, why wood and oil float on water, and why the surface of water is always flat and horizontal whatever the shape of its container. Fluid dynamics is a subdiscipline of fluid mechanics that deals with fluid flow— the natural science of fluids (liquids and gases) in motion. It has several subdisciplines itself, including aerodynamics (the study of air and other gases in motion) and hydrodynamics (the study of liquids in motion). -

Fluid Mechanics
cen72367_fm.qxd 11/23/04 11:22 AM Page i FLUID MECHANICS FUNDAMENTALS AND APPLICATIONS cen72367_fm.qxd 11/23/04 11:22 AM Page ii McGRAW-HILL SERIES IN MECHANICAL ENGINEERING Alciatore and Histand: Introduction to Mechatronics and Measurement Systems Anderson: Computational Fluid Dynamics: The Basics with Applications Anderson: Fundamentals of Aerodynamics Anderson: Introduction to Flight Anderson: Modern Compressible Flow Barber: Intermediate Mechanics of Materials Beer/Johnston: Vector Mechanics for Engineers Beer/Johnston/DeWolf: Mechanics of Materials Borman and Ragland: Combustion Engineering Budynas: Advanced Strength and Applied Stress Analysis Çengel and Boles: Thermodynamics: An Engineering Approach Çengel and Cimbala: Fluid Mechanics: Fundamentals and Applications Çengel and Turner: Fundamentals of Thermal-Fluid Sciences Çengel: Heat Transfer: A Practical Approach Crespo da Silva: Intermediate Dynamics Dieter: Engineering Design: A Materials & Processing Approach Dieter: Mechanical Metallurgy Doebelin: Measurement Systems: Application & Design Dunn: Measurement & Data Analysis for Engineering & Science EDS, Inc.: I-DEAS Student Guide Hamrock/Jacobson/Schmid: Fundamentals of Machine Elements Henkel and Pense: Structure and Properties of Engineering Material Heywood: Internal Combustion Engine Fundamentals Holman: Experimental Methods for Engineers Holman: Heat Transfer Hsu: MEMS & Microsystems: Manufacture & Design Hutton: Fundamentals of Finite Element Analysis Kays/Crawford/Weigand: Convective Heat and Mass Transfer Kelly: Fundamentals -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Lecture 1: Introduction
Lecture 1: Introduction E. J. Hinch Non-Newtonian fluids occur commonly in our world. These fluids, such as toothpaste, saliva, oils, mud and lava, exhibit a number of behaviors that are different from Newtonian fluids and have a number of additional material properties. In general, these differences arise because the fluid has a microstructure that influences the flow. In section 2, we will present a collection of some of the interesting phenomena arising from flow nonlinearities, the inhibition of stretching, elastic effects and normal stresses. In section 3 we will discuss a variety of devices for measuring material properties, a process known as rheometry. 1 Fluid Mechanical Preliminaries The equations of motion for an incompressible fluid of unit density are (for details and derivation see any text on fluid mechanics, e.g. [1]) @u + (u · r) u = r · S + F (1) @t r · u = 0 (2) where u is the velocity, S is the total stress tensor and F are the body forces. It is customary to divide the total stress into an isotropic part and a deviatoric part as in S = −pI + σ (3) where tr σ = 0. These equations are closed only if we can relate the deviatoric stress to the velocity field (the pressure field satisfies the incompressibility condition). It is common to look for local models where the stress depends only on the local gradients of the flow: σ = σ (E) where E is the rate of strain tensor 1 E = ru + ruT ; (4) 2 the symmetric part of the the velocity gradient tensor. The trace-free requirement on σ and the physical requirement of symmetry σ = σT means that there are only 5 independent components of the deviatoric stress: 3 shear stresses (the off-diagonal elements) and 2 normal stress differences (the diagonal elements constrained to sum to 0). -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
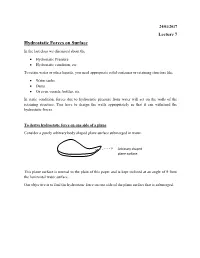
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Ch. 8 Deflections Due to Bending
446.201A (Solid Mechanics) Professor Youn, Byeng Dong CH. 8 DEFLECTIONS DUE TO BENDING Ch. 8 Deflections due to bending 1 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong 8.1 Introduction i) We consider the deflections of slender members which transmit bending moments. ii) We shall treat statically indeterminate beams which require simultaneous consideration of all three of the steps (2.1) iii) We study mechanisms of plastic collapse for statically indeterminate beams. iv) The calculation of the deflections is very important way to analyze statically indeterminate beams and confirm whether the deflections exceed the maximum allowance or not. 8.2 The Moment – Curvature Relation ▶ From Ch.7 à When a symmetrical, linearly elastic beam element is subjected to pure bending, as shown in Fig. 8.1, the curvature of the neutral axis is related to the applied bending moment by the equation. ∆ = = = = (8.1) ∆→ ∆ For simplification, → ▶ Simplification i) When is not a constant, the effect on the overall deflection by the shear force can be ignored. ii) Assume that although M is not a constant the expressions defined from pure bending can be applied. Ch. 8 Deflections due to bending 2 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong ▶ Differential equations between the curvature and the deflection 1▷ The case of the large deflection The slope of the neutral axis in Fig. 8.2 (a) is = Next, differentiation with respect to arc length s gives = ( ) ∴ = → = (a) From Fig. 8.2 (b) () = () + () → = 1 + Ch. 8 Deflections due to bending 3 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong → = (b) (/) & = = (c) [(/)]/ If substitutng (b) and (c) into the (a), / = = = (8.2) [(/)]/ [()]/ ∴ = = [()]/ When the slope angle shown in Fig. -

On the Geometric Character of Stress in Continuum Mechanics
Z. angew. Math. Phys. 58 (2007) 1–14 0044-2275/07/050001-14 DOI 10.1007/s00033-007-6141-8 Zeitschrift f¨ur angewandte c 2007 Birkh¨auser Verlag, Basel Mathematik und Physik ZAMP On the geometric character of stress in continuum mechanics Eva Kanso, Marino Arroyo, Yiying Tong, Arash Yavari, Jerrold E. Marsden1 and Mathieu Desbrun Abstract. This paper shows that the stress field in the classical theory of continuum mechanics may be taken to be a covector-valued differential two-form. The balance laws and other funda- mental laws of continuum mechanics may be neatly rewritten in terms of this geometric stress. A geometrically attractive and covariant derivation of the balance laws from the principle of energy balance in terms of this stress is presented. Mathematics Subject Classification (2000). Keywords. Continuum mechanics, elasticity, stress tensor, differential forms. 1. Motivation This paper proposes a reformulation of classical continuum mechanics in terms of bundle-valued exterior forms. Our motivation is to provide a geometric description of force in continuum mechanics, which leads to an elegant geometric theory and, at the same time, may enable the development of space-time integration algorithms that respect the underlying geometric structure at the discrete level. In classical mechanics the traditional approach is to define all the kinematic and kinetic quantities using vector and tensor fields. For example, velocity and traction are both viewed as vector fields and power is defined as their inner product, which is induced from an appropriately defined Riemannian metric. On the other hand, it has long been appreciated in geometric mechanics that force should not be viewed as a vector, but rather a one-form. -

Chapter 3 Newtonian Fluids
CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Chapter 3: Newtonian Fluids CM4650 Polymer Rheology Michigan Tech Navier-Stokes Equation v vv p 2 v g t 1 © Faith A. Morrison, Michigan Tech U. Chapter 3: Newtonian Fluid Mechanics TWO GOALS •Derive governing equations (mass and momentum balances •Solve governing equations for velocity and stress fields QUICK START V W x First, before we get deep into 2 v (x ) H derivation, let’s do a Navier-Stokes 1 2 x1 problem to get you started in the x3 mechanics of this type of problem solving. 2 © Faith A. Morrison, Michigan Tech U. 1 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics EXAMPLE: Drag flow between infinite parallel plates •Newtonian •steady state •incompressible fluid •very wide, long V •uniform pressure W x2 v1(x2) H x1 x3 3 EXAMPLE: Poiseuille flow between infinite parallel plates •Newtonian •steady state •Incompressible fluid •infinitely wide, long W x2 2H x1 x3 v (x ) x1=0 1 2 x1=L p=Po p=PL 4 2 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Engineering Quantities of In more complex flows, we can use Interest general expressions that work in all cases. (any flow) volumetric ⋅ flow rate ∬ ⋅ | average 〈 〉 velocity ∬ Using the general formulas will Here, is the outwardly pointing unit normal help prevent errors. of ; it points in the direction “through” 5 © Faith A. Morrison, Michigan Tech U. The stress tensor was Total stress tensor, Π: invented to make the calculation of fluid stress easier. Π ≡ b (any flow, small surface) dS nˆ Force on the S ⋅ Π surface V (using the stress convention of Understanding Rheology) Here, is the outwardly pointing unit normal of ; it points in the direction “through” 6 © Faith A. -

Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics
Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics Vlado A. Lubarda Montenegrin Academy of Sciences and Arts Division of Natural Sciencies OPN, CANU 2012 Contents Preface xi Part 1. LINEAR ELASTICITY 1 Chapter 1. Anisotropic Nonuniform Lam´eProblem 2 1.1. Elastic Anisotropy 2 1.2. Radial Nonuniformity 3 1.3. Governing Differential Equations 4 1.4. Stress and Displacement Expressions 5 1.5. Traction Boundary Conditions 6 1.6. Applied External Pressure 7 1.7. Plane Stress Approximation 8 1.8. Generalized Plane Stress 10 References 11 Chapter 2. Stretching of a Hollow Circular Membrane 12 2.1. Introduction 12 2.2. Basic Equations 12 2.3. Traction Boundary Conditions 13 2.4. Mixed Boundary Conditions 16 References 18 Chapter 3. Energy of Circular Inclusion with Sliding Interface 21 3.1. Energy Expressions for Sliding Inclusion 21 3.2. Energies due to Eigenstrain 22 3.3. Energies due to Remote Loading 23 3.4. Inhomogeneity under Remote Loading 25 References 26 Chapter 4. Eigenstrain Problem for Nonellipsoidal Inclusions 27 4.1. Eshelby Property 27 4.2. Displacement Expression 27 4.3. The Shape of an Inclusion 28 4.4. Other Shapes of Inclusions 30 References 32 Chapter 5. Circular Loads on the Surface of a Half-Space 33 5.1. Displacements due to Vertical Ring Load 33 5.2. Alternative Displacement Expressions 34 iii iv CONTENTS 5.3. Tangential Line Load 37 5.4. Alternative Expressions 39 5.5. Reciprocal Properties 43 References 45 Chapter 6. Elasticity Tensors of Anisotropic Materials 46 6.1. Elastic Moduli of Transversely Isotropic Materials 46 6.2. -

Leonhard Euler - Wikipedia, the Free Encyclopedia Page 1 of 14
Leonhard Euler - Wikipedia, the free encyclopedia Page 1 of 14 Leonhard Euler From Wikipedia, the free encyclopedia Leonhard Euler ( German pronunciation: [l]; English Leonhard Euler approximation, "Oiler" [1] 15 April 1707 – 18 September 1783) was a pioneering Swiss mathematician and physicist. He made important discoveries in fields as diverse as infinitesimal calculus and graph theory. He also introduced much of the modern mathematical terminology and notation, particularly for mathematical analysis, such as the notion of a mathematical function.[2] He is also renowned for his work in mechanics, fluid dynamics, optics, and astronomy. Euler spent most of his adult life in St. Petersburg, Russia, and in Berlin, Prussia. He is considered to be the preeminent mathematician of the 18th century, and one of the greatest of all time. He is also one of the most prolific mathematicians ever; his collected works fill 60–80 quarto volumes. [3] A statement attributed to Pierre-Simon Laplace expresses Euler's influence on mathematics: "Read Euler, read Euler, he is our teacher in all things," which has also been translated as "Read Portrait by Emanuel Handmann 1756(?) Euler, read Euler, he is the master of us all." [4] Born 15 April 1707 Euler was featured on the sixth series of the Swiss 10- Basel, Switzerland franc banknote and on numerous Swiss, German, and Died Russian postage stamps. The asteroid 2002 Euler was 18 September 1783 (aged 76) named in his honor. He is also commemorated by the [OS: 7 September 1783] Lutheran Church on their Calendar of Saints on 24 St. Petersburg, Russia May – he was a devout Christian (and believer in Residence Prussia, Russia biblical inerrancy) who wrote apologetics and argued Switzerland [5] forcefully against the prominent atheists of his time. -

Chapter 15 - Fluid Mechanics Thursday, March 24Th
Chapter 15 - Fluid Mechanics Thursday, March 24th •Fluids – Static properties • Density and pressure • Hydrostatic equilibrium • Archimedes principle and buoyancy •Fluid Motion • The continuity equation • Bernoulli’s effect •Demonstration, iClicker and example problems Reading: pages 243 to 255 in text book (Chapter 15) Definitions: Density Pressure, ρ , is defined as force per unit area: Mass M ρ = = [Units – kg.m-3] Volume V Definition of mass – 1 kg is the mass of 1 liter (10-3 m3) of pure water. Therefore, density of water given by: Mass 1 kg 3 −3 ρH O = = 3 3 = 10 kg ⋅m 2 Volume 10− m Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Atmospheric pressure (1 atm.) is equal to 101325 N.m-2. 1 pound per square inch (1 psi) is equal to: 1 psi = 6944 Pa = 0.068 atm 1atm = 14.7 psi Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Pressure in Fluids Pressure, " p, is defined as force per unit area: # Force F p = = [Units – N.m-2, or Pascal (Pa)] " A8" rea A + $ In the presence of gravity, pressure in a static+ 8" fluid increases with depth. " – This allows an upward pressure force " to balance the downward gravitational force. + " $ – This condition is hydrostatic equilibrium. – Incompressible fluids like liquids have constant density; for them, pressure as a function of depth h is p p gh = 0+ρ p0 = pressure at surface " + Pressure in Fluids Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A In the presence of gravity, pressure in a static fluid increases with depth.