AIAA 2000-0900 Aerodynamic Characteristics, Database Development and Flight Simulation of the X-34 Vehicle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rocket Propulsion Fundamentals 2
https://ntrs.nasa.gov/search.jsp?R=20140002716 2019-08-29T14:36:45+00:00Z Liquid Propulsion Systems – Evolution & Advancements Launch Vehicle Propulsion & Systems LPTC Liquid Propulsion Technical Committee Rick Ballard Liquid Engine Systems Lead SLS Liquid Engines Office NASA / MSFC All rights reserved. No part of this publication may be reproduced, distributed, or transmitted, unless for course participation and to a paid course student, in any form or by any means, or stored in a database or retrieval system, without the prior written permission of AIAA and/or course instructor. Contact the American Institute of Aeronautics and Astronautics, Professional Development Program, Suite 500, 1801 Alexander Bell Drive, Reston, VA 20191-4344 Modules 1. Rocket Propulsion Fundamentals 2. LRE Applications 3. Liquid Propellants 4. Engine Power Cycles 5. Engine Components Module 1: Rocket Propulsion TOPICS Fundamentals • Thrust • Specific Impulse • Mixture Ratio • Isp vs. MR • Density vs. Isp • Propellant Mass vs. Volume Warning: Contents deal with math, • Area Ratio physics and thermodynamics. Be afraid…be very afraid… Terms A Area a Acceleration F Force (thrust) g Gravity constant (32.2 ft/sec2) I Impulse m Mass P Pressure Subscripts t Time a Ambient T Temperature c Chamber e Exit V Velocity o Initial state r Reaction ∆ Delta / Difference s Stagnation sp Specific ε Area Ratio t Throat or Total γ Ratio of specific heats Thrust (1/3) Rocket thrust can be explained using Newton’s 2nd and 3rd laws of motion. 2nd Law: a force applied to a body is equal to the mass of the body and its acceleration in the direction of the force. -

L AUNCH SYSTEMS Databk7 Collected.Book Page 18 Monday, September 14, 2009 2:53 PM Databk7 Collected.Book Page 19 Monday, September 14, 2009 2:53 PM
databk7_collected.book Page 17 Monday, September 14, 2009 2:53 PM CHAPTER TWO L AUNCH SYSTEMS databk7_collected.book Page 18 Monday, September 14, 2009 2:53 PM databk7_collected.book Page 19 Monday, September 14, 2009 2:53 PM CHAPTER TWO L AUNCH SYSTEMS Introduction Launch systems provide access to space, necessary for the majority of NASA’s activities. During the decade from 1989–1998, NASA used two types of launch systems, one consisting of several families of expendable launch vehicles (ELV) and the second consisting of the world’s only partially reusable launch system—the Space Shuttle. A significant challenge NASA faced during the decade was the development of technologies needed to design and implement a new reusable launch system that would prove less expensive than the Shuttle. Although some attempts seemed promising, none succeeded. This chapter addresses most subjects relating to access to space and space transportation. It discusses and describes ELVs, the Space Shuttle in its launch vehicle function, and NASA’s attempts to develop new launch systems. Tables relating to each launch vehicle’s characteristics are included. The other functions of the Space Shuttle—as a scientific laboratory, staging area for repair missions, and a prime element of the Space Station program—are discussed in the next chapter, Human Spaceflight. This chapter also provides a brief review of launch systems in the past decade, an overview of policy relating to launch systems, a summary of the management of NASA’s launch systems programs, and tables of funding data. The Last Decade Reviewed (1979–1988) From 1979 through 1988, NASA used families of ELVs that had seen service during the previous decade. -

Development of a Reliable Performance Gas Generator of 75 Tonf-Class Liquid Rocket Engine for the Korea Space Launch Vehicle II
DOI: 10.13009/EUCASS2019-521 8TH EUROPEAN CONFERENCE FOR AERONAUTICS AND SPACE SCIENCES (EUCASS) Development of a Reliable Performance Gas Generator of 75 tonf-class Liquid Rocket Engine for the Korea Space Launch Vehicle II Byoungjik Lim*, Munki Kim*, Donghyuk Kang*, Hyeon-Jun Kim*, Jong-Gyu Kim*, and Hwan-Seok Choi* *Korea Aerospace Research Institute 169-84, Gwahak-ro, Yuseong-Gu Daejeon, 34133, South Korea [email protected] Abstract In this paper, development history and result of a reliable performance gas generator of 75 tonf-class liquid rocket engine is described. Based on the experience acquired from the 30 tonf-class gas generator development, the almost identical concept was adopted to 75 tonf-class gas generator such as a coaxial swirl injector and a regeneratively cooled combustion chamber. During the entire development process using the full-scale and subscale technological demonstration model and development model up to now, combustion tests of over 430 times and cumulative time of over 17 700 seconds have been carried out for a 75 tonf-class gas generate. Now the 75 tonf-class fuel-rich gas generator shows very reliable and reproducible characteristics throughout the entire lifetime including the flight test which was done with the test launch vehicle in November 2018. Thus, it can be said that the development of a 75 tonf-class fuel rich gas generator which will be used in Korea first independent space launch vehicle, KSLV-II was finished successfully. 1. Introduction As a leading institute for technology which is related with space launch vehicle and a national space development agency in the Republic of KOREA, the Korea Aerospace Research Institute (KARI) has been continuously researching and developing technology related to space launch vehicles since establishment in 1989. -

Materials for Liquid Propulsion Systems
https://ntrs.nasa.gov/search.jsp?R=20160008869 2019-08-29T17:47:59+00:00Z CHAPTER 12 Materials for Liquid Propulsion Systems John A. Halchak Consultant, Los Angeles, California James L. Cannon NASA Marshall Space Flight Center, Huntsville, Alabama Corey Brown Aerojet-Rocketdyne, West Palm Beach, Florida 12.1 Introduction Earth to orbit launch vehicles are propelled by rocket engines and motors, both liquid and solid. This chapter will discuss liquid engines. The heart of a launch vehicle is its engine. The remainder of the vehicle (with the notable exceptions of the payload and guidance system) is an aero structure to support the propellant tanks which provide the fuel and oxidizer to feed the engine or engines. The basic principle behind a rocket engine is straightforward. The engine is a means to convert potential thermochemical energy of one or more propellants into exhaust jet kinetic energy. Fuel and oxidizer are burned in a combustion chamber where they create hot gases under high pressure. These hot gases are allowed to expand through a nozzle. The molecules of hot gas are first constricted by the throat of the nozzle (de-Laval nozzle) which forces them to accelerate; then as the nozzle flares outwards, they expand and further accelerate. It is the mass of the combustion gases times their velocity, reacting against the walls of the combustion chamber and nozzle, which produce thrust according to Newton’s third law: for every action there is an equal and opposite reaction. [1] Solid rocket motors are cheaper to manufacture and offer good values for their cost. -

Fastrac Engine: Understanding Technical Implications of Programmatic Decisions
Fastrac Engine: Understanding Technical Implications of Programmatic Decisions Mary Beth Koelbl Katherine Van Hooser 7/28/15 Outline I. Introduction and Objective of Presentation II. Background and Landscape A. Engine Developments B. Fastrac Origins and the Government-Led Approach C. Implementation III. Transition from Manned Space Flight to Faster Better Cheaper A. Fastrac Features B. Lessons Learned IV. Fastrac History V. Program Legacy Background and Landscape • There was significant hiring at MSFC in the late 1980’s and early 1990’s. The center was immersed in Challenger Return-to-Flight and Shuttle upgrades, but little else • By the mid 1990’s, recognizing the need to train the new generation of engineers who were lacking in development expertise, MSFC management decided to take action o Propulsion and Materials management knew that engine developments were difficult and costly o They needed to create an opportunity themselves so they focused on in-house designed component technologies o Simplex Turbopump and 40k Thrust Chamber Assembly began; focused on 15 to 40k thrust applications such as Bantam Background and Landscape • In the Mid 1990s, leveraging the component technology effort, an in- house rocket engine design and development project was initiated • The Objectives were to o Demonstrate low cost engine in a faster, better, cheaper way of doing business. Including utilizing non-traditional suppliers o Give the younger propulsion engineers real hands-on hardware and cradle-to-grave design experience. • A test-bed / prototype engine design and hardware project, conducted entirely in-house, was chosen as an effective way of accomplishing these objectives • Initially envisioned a test-bed for the Bantam Booster, low cost design with a 2 Year Development; eventually became a 60k engine design First and Only Large Rocket Engine Developed in-House at NASA 4 Background and Landscape System Req. -

발사체 소형엔진용 적층제조 기술 동향 Technology Trends
Journal of the Korean Society of Propulsion Engineers Vol. 24, No. 2, pp. 73-82, 2020 73 Technical Paper DOI: https://doi.org/10.6108/KSPE.2020.24.2.073 발사체 소형엔진용 적층제조 기술 동향 이금오 a, * ․ 임병직 a ․ 김대진 b ․ 홍문근 c ․ 이기주 a Technology Trends in Additively Manufactured Small Rocket Engines for Launcher Applications Keum-Oh Lee a, * ․ Byoungjik Lim a ․ Dae-Jin Kim b ․ Moongeun Hong c ․ Keejoo Lee a a Future Launcher R&D Program Office, Korea Aerospace Research Institute, Korea b Turbopump Team, Korea Aerospace Research Institute, Korea c Launcher Propulsion Control Team, Korea Aerospace Research Institute, Korea * Corresponding author. E-mail: [email protected] ABSTRACT Additively manufactured, small rocket engines are perhaps the focal activities of space startups that are developing low-cost launch vehicles. Rocket engine companies such as SpaceX and Rocket Lab in the United States, Ariane Group in Europe, and IHI in Japan have already adopted the additive manufacturing process in building key components of their rocket engines. In this paper on technology trends, an existing valve housing of a rocket engine is chosen as a case study to examine the feasibility of using additively manufactured parts for rocket engines. 초 록 저비용 발사체를 개발 중인 많은 스타트업들이 소형 로켓 엔진을 확보하기 위해 적층제조 기법을 개발 중이다. 또한, 미국의 SpaceX, Rocket Lab 등을 비롯하여, 유럽의 Ariane Group, 일본의 IHI와 같은 엔진 제작업체들은 로켓 엔진의 주요부품에 적층제조를 채택하여 생산하고 있다. 본 논문에서 는 적층제작기법의 타당성을 조사하기 위해서 기존 로켓 엔진의 밸브 하우징을 적층제조 하는 사례 연구 결과를 소개한다. Key Words: Additive Manufacturing(적층제조), 3D Printing(3D 프린팅), Liquid Rocket Engine(액체 로켓엔진), Thrust Chamber(연소기), Turbopump(터보펌프), Valve(밸브) 1. -

Los Motores Aeroespaciales, A-Z
Sponsored by L’Aeroteca - BARCELONA ISBN 978-84-608-7523-9 < aeroteca.com > Depósito Legal B 9066-2016 Título: Los Motores Aeroespaciales A-Z. © Parte/Vers: 1/12 Página: 1 Autor: Ricardo Miguel Vidal Edición 2018-V12 = Rev. 01 Los Motores Aeroespaciales, A-Z (The Aerospace En- gines, A-Z) Versión 12 2018 por Ricardo Miguel Vidal * * * -MOTOR: Máquina que transforma en movimiento la energía que recibe. (sea química, eléctrica, vapor...) Sponsored by L’Aeroteca - BARCELONA ISBN 978-84-608-7523-9 Este facsímil es < aeroteca.com > Depósito Legal B 9066-2016 ORIGINAL si la Título: Los Motores Aeroespaciales A-Z. © página anterior tiene Parte/Vers: 1/12 Página: 2 el sello con tinta Autor: Ricardo Miguel Vidal VERDE Edición: 2018-V12 = Rev. 01 Presentación de la edición 2018-V12 (Incluye todas las anteriores versiones y sus Apéndices) La edición 2003 era una publicación en partes que se archiva en Binders por el propio lector (2,3,4 anillas, etc), anchos o estrechos y del color que desease durante el acopio parcial de la edición. Se entregaba por grupos de hojas impresas a una cara (edición 2003), a incluir en los Binders (archivadores). Cada hoja era sustituíble en el futuro si aparecía una nueva misma hoja ampliada o corregida. Este sistema de anillas admitia nuevas páginas con información adicional. Una hoja con adhesivos para portada y lomo identifi caba cada volumen provisional. Las tapas defi nitivas fueron metálicas, y se entregaraban con el 4 º volumen. O con la publicación completa desde el año 2005 en adelante. -Las Publicaciones -parcial y completa- están protegidas legalmente y mediante un sello de tinta especial color VERDE se identifi can los originales. -
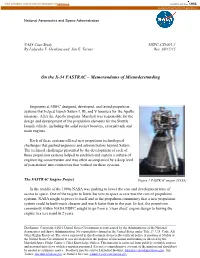
On the X-34 FASTRAC – Memorandums of Misunderstanding
https://ntrs.nasa.gov/search.jsp?R=20160005660 2019-08-31T03:30:34+00:00Z View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by NASA Technical Reports Server National Aeronautics and Space Administration NASA Case Study MSFC-CS1001-1 By Lakiesha V. Hawkins and Jim E. Turner Rev. 09/15/15 On the X-34 FASTRAC – Memorandums of Misunderstanding Engineers at MSFC designed, developed, and tested propulsion systems that helped launch Saturn I, IB, and V boosters for the Apollo missions. After the Apollo program, Marshall was responsible for the design and development of the propulsion elements for the Shuttle launch vehicle, including the solid rocket boosters, external tank and main engines. Each of these systems offered new propulsion technological challenges that pushed engineers and administrators beyond Saturn. The technical challenges presented by the development of each of these propulsion systems helped to establish and sustain a culture of engineering conservatism and was often accompanied by a deep level of penetrationi into contractors that worked on these systems. The FASTRAC Engine Project Figure 1 FASTRAC engine (NASA) In the middle of the 1990s NASA was pushing to lower the cost and development time of access to space. One of the targets to lower barriers to space access was the cost of propulsion systems. NASA sought to prove to itself and to the propulsion community that a new propulsion system could be built much cheaper and much faster than in the past. In fact, the propulsion community within NASA MSFC sought to go from a ‘clean sheet’ engine design to having the engine in a test stand in 2 years. -

The Annual Compendium of Commercial Space Transportation: 2017
Federal Aviation Administration The Annual Compendium of Commercial Space Transportation: 2017 January 2017 Annual Compendium of Commercial Space Transportation: 2017 i Contents About the FAA Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 51 United States Code, Subtitle V, Chapter 509 (formerly the Commercial Space Launch Act). FAA AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA AST is directed to encourage, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA AST’s website: http://www.faa.gov/go/ast Cover art: Phil Smith, The Tauri Group (2017) Publication produced for FAA AST by The Tauri Group under contract. NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. ii Annual Compendium of Commercial Space Transportation: 2017 GENERAL CONTENTS Executive Summary 1 Introduction 5 Launch Vehicles 9 Launch and Reentry Sites 21 Payloads 35 2016 Launch Events 39 2017 Annual Commercial Space Transportation Forecast 45 Space Transportation Law and Policy 83 Appendices 89 Orbital Launch Vehicle Fact Sheets 100 iii Contents DETAILED CONTENTS EXECUTIVE SUMMARY . -
Methodology for Identifying Key Parameters Affecting Reusability for Liquid Rocket Engines
Methodology for Identifying Key Parameters Affecting Reusability for Liquid Rocket Engines Presented by: Bruce Askins Rhonda Childress-Thompson Marshall Space Flight Center & Dr. Dale Thomas The University of Alabama in Huntsville Outline • Objective • Reusability Defined • Benefits of Reusability • Previous Research • Approach • Challenges • Available Data • Approach • Results • Next Steps • Summary Objective • To use statistical techniques to identify which parameters are tightly correlated with increasing the reusability of liquid rocket engine hardware. Reusability/Reusable Defined Ideally • “The ability to use a system for multiple missions without the need for replacement of systems or subsystems. Ideally, only replenishment of consumable commodities (propellant and gas products, for instance)occurs between missions.” (Jefferies, et al., 2015) For purposes of this research • Any space flight hardware that is not only designed to perform multiple flights, but actually accomplishes multiple flights. Benefits of Reusability • Forces inspections of returning hardware • Offers insight into how a part actually performs • Allows the development of databases for future development • Validates ground tests and analyses • Allows the expensive hardware to be used multiple times Previous Research – Identification of Features Conducive for Reuse Implementation 1. Reusability Requirement Implemented at the Conceptual Stage 2. Continuous Test Program 3. Minimize Post-Flight Inspections & Servicing to Enhance Turnaround Time 4. Easy Access 5. Longer Service Life 6. Minimize Impact of Recovery 7. Evolutionary vs. Revolutionary Changes MSFC Legacy of Propulsion Excellence (Evolutionary Changes) Saturn V J-2S 1970 1980 1990 2000 2010 2015 Challenges • Engine data difficult to locate • Limited data for reusable engines (i.e. Space Shuttle, Space Shuttle Main Engine (SSME) and Solid Rocket Booster (SRB) • Benefits of reusability have not been validated • Industry standards do not exist Engine Data Available Engine Time from No. -

AIAA 2000-3401 NASA Fastrac Engine Gas Generator Component Test Program and Results
AIAA 2000-3401 NASA Fastrac Engine Gas Generator Component Test Program and Results Henry J. Dennis, Jr. and Tim Sanders NASA Marshall Space Flight Center Huntsville, AL 36 th AIAA/ASME/SAE/ASEE Joint Propulsion Conference 17-19 July 2000 Huntsville, Alabama For permission to copy or to republish, contact the American Institute of Aeronautics and Astronautics, 1801 Alexander Bell Drive, Suite 500, Reston, VA, 20191-4344. AIAA-2000-3401 NASA FASTRAC ENGINE GAS GENERATOR COMPONENT TEST P[-?.OGRAM AND RESITLTS H. J. Dennis. Jr. and T. Sanders NASA Marshall Space Flight Center Huntsville, Alabama 35812 tmiformit 3 characteristics of the GG and determine the injector-to-chanaber _all compatibility. The GG Lo'_v cost access to space has been a long-time goal of the National Aeronautics and Space Administration (NASA). The Fastrac engine program was begun at NASA's Marshall Space Flight Center to develop a 60,000-pound (60K) thrust, liquid oxygen/hydrocarbon (LOX/RP), gas generator-cycle booster engine for a fraction of the cost of similar engines in existence. To achieve this goal, off-the-shelf components and readily available materials and processes would have to be used. This paper will present the Fastrac gas generator (GG) design and the component level hot-fire test program and results. The Fastrac GG is a simple, 4- piece design that uses well-defined materials and processes for fabrication. Thirty-seven component level hot-fire tests were conducted at MSFC's component test stand #116 (TSII6) during 1997 and 1998. The GG was operated at all expected operating ranges of the Fastrac engine. -

Materials for Liquid Propulsion Systems
CHAPTER 12 Materials for Liquid Propulsion Systems John A. Halchak Consultant, Los Angeles, California James L. Cannon NASA Marshall Space Flight Center, Huntsville, Alabama Corey Brown Aerojet-Rocketdyne, West Palm Beach, Florida 12.1 Introduction Earth to orbit launch vehicles are propelled by rocket engines and motors, both liquid and solid. This chapter will discuss liquid engines. The heart of a launch vehicle is its engine. The remainder of the vehicle (with the notable exceptions of the payload and guidance system) is an aero structure to support the propellant tanks which provide the fuel and oxidizer to feed the engine or engines. The basic principle behind a rocket engine is straightforward. The engine is a means to convert potential thermochemical energy of one or more propellants into exhaust jet kinetic energy. Fuel and oxidizer are burned in a combustion chamber where they create hot gases under high pressure. These hot gases are allowed to expand through a nozzle. The molecules of hot gas are first constricted by the throat of the nozzle (de-Laval nozzle) which forces them to accelerate; then as the nozzle flares outwards, they expand and further accelerate. It is the mass of the combustion gases times their velocity, reacting against the walls of the combustion chamber and nozzle, which produce thrust according to Newton’s third law: for every action there is an equal and opposite reaction. [1] Solid rocket motors are cheaper to manufacture and offer good values for their cost. Liquid propellant engines offer higher performance, that is, they deliver greater thrust per unit weight of propellant burned.