Node Report for PDS MC Face-To-Face Meeting
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

JUICE Red Book
ESA/SRE(2014)1 September 2014 JUICE JUpiter ICy moons Explorer Exploring the emergence of habitable worlds around gas giants Definition Study Report European Space Agency 1 This page left intentionally blank 2 Mission Description Jupiter Icy Moons Explorer Key science goals The emergence of habitable worlds around gas giants Characterise Ganymede, Europa and Callisto as planetary objects and potential habitats Explore the Jupiter system as an archetype for gas giants Payload Ten instruments Laser Altimeter Radio Science Experiment Ice Penetrating Radar Visible-Infrared Hyperspectral Imaging Spectrometer Ultraviolet Imaging Spectrograph Imaging System Magnetometer Particle Package Submillimetre Wave Instrument Radio and Plasma Wave Instrument Overall mission profile 06/2022 - Launch by Ariane-5 ECA + EVEE Cruise 01/2030 - Jupiter orbit insertion Jupiter tour Transfer to Callisto (11 months) Europa phase: 2 Europa and 3 Callisto flybys (1 month) Jupiter High Latitude Phase: 9 Callisto flybys (9 months) Transfer to Ganymede (11 months) 09/2032 – Ganymede orbit insertion Ganymede tour Elliptical and high altitude circular phases (5 months) Low altitude (500 km) circular orbit (4 months) 06/2033 – End of nominal mission Spacecraft 3-axis stabilised Power: solar panels: ~900 W HGA: ~3 m, body fixed X and Ka bands Downlink ≥ 1.4 Gbit/day High Δv capability (2700 m/s) Radiation tolerance: 50 krad at equipment level Dry mass: ~1800 kg Ground TM stations ESTRAC network Key mission drivers Radiation tolerance and technology Power budget and solar arrays challenges Mass budget Responsibilities ESA: manufacturing, launch, operations of the spacecraft and data archiving PI Teams: science payload provision, operations, and data analysis 3 Foreword The JUICE (JUpiter ICy moon Explorer) mission, selected by ESA in May 2012 to be the first large mission within the Cosmic Vision Program 2015–2025, will provide the most comprehensive exploration to date of the Jovian system in all its complexity, with particular emphasis on Ganymede as a planetary body and potential habitat. -

Juno Spacecraft Description
Juno Spacecraft Description By Bill Kurth 2012-06-01 Juno Spacecraft (ID=JNO) Description The majority of the text in this file was extracted from the Juno Mission Plan Document, S. Stephens, 29 March 2012. [JPL D-35556] Overview For most Juno experiments, data were collected by instruments on the spacecraft then relayed via the orbiter telemetry system to stations of the NASA Deep Space Network (DSN). Radio Science required the DSN for its data acquisition on the ground. The following sections provide an overview, first of the orbiter, then the science instruments, and finally the DSN ground system. Juno launched on 5 August 2011. The spacecraft uses a deltaV-EGA trajectory consisting of a two-part deep space maneuver on 30 August and 14 September 2012 followed by an Earth gravity assist on 9 October 2013 at an altitude of 559 km. Jupiter arrival is on 5 July 2016 using two 53.5-day capture orbits prior to commencing operations for a 1.3-(Earth) year-long prime mission comprising 32 high inclination, high eccentricity orbits of Jupiter. The orbit is polar (90 degree inclination) with a periapsis altitude of 4200-8000 km and a semi-major axis of 23.4 RJ (Jovian radius) giving an orbital period of 13.965 days. The primary science is acquired for approximately 6 hours centered on each periapsis although fields and particles data are acquired at low rates for the remaining apoapsis portion of each orbit. Juno is a spin-stabilized spacecraft equipped for 8 diverse science investigations plus a camera included for education and public outreach. -

The Europa Clipper Mission: Investigating an Ocean World's Habitability
PPS01-15 JpGU-AGU Joint Meeting 2020 The Europa Clipper Mission: Investigating an Ocean World's Habitability *Steven Douglas Vance1, Robert T Pappalardo1, David A Senske1, Haje Korth2, Kate Craft2, Sam Howell1, Rachel L Klima2, Erin J Leonard1, Cynthia B Phillips1, Christina Richey1 1. NASA Jet Propulsion Laboratory, California Institute of Technology, 2. The Johns Hopkins University Applied Physics Laboratory Europa is believed to have a liquid ocean beneath its icy shell, abundant physical energy, and drivers for chemical disequilibrium. The Europa Clipper mission will conduct multiple fly-bys of Europa while orbiting Jupiter, with the overarching goal to explore this moon to investigate its habitability. This goal encompasses three Mission Objectives: I. Characterize the ice shell and any subsurface water, including their heterogeneity, ocean properties, and the nature of surface-ice-ocean exchange; II. Understand the habitability of Europa's ocean through composition and chemistry; and III. Understand the formation of surface features, including sites of recent or current activity, and characterize high science interest localities. The Europa Clipper addresses these with a capable payload of scientific instruments, plus gravity/radio and radiation science investigations. NASA selected a payload consisting of both remote-sensing and in-situ-observing instruments. The remote-sensing instruments observe the wavelength range from ultraviolet through radar, which are the Europa Ultraviolet Spectrograph (Europa-UVS), the Europa Imaging System (EIS), the Mapping Imaging Spectrometer for Europa (MISE), the Europa Thermal Imaging System (E-THEMIS), and the Radar for Europa Assessment and Sounding: Ocean to Near-surface (REASON). The in-situ-measuring particle instruments comprise the Plasma Instrument for Magnetic Sounding (PIMS), the MAss Spectrometer for Planetary Exploration (MASPEX), and the SUrface Dust Analyzer (SUDA). -
Juno Magnetometer (MAG) Standard Product Data Record and Archive Volume Software Interface Specification
Juno Magnetometer Juno Magnetometer (MAG) Standard Product Data Record and Archive Volume Software Interface Specification Preliminary March 6, 2018 Prepared by: Jack Connerney and Patricia Lawton Juno Magnetometer MAG Standard Product Data Record and Archive Volume Software Interface Specification Preliminary March 6, 2018 Approved: John E. P. Connerney Date MAG Principal Investigator Raymond J. Walker Date PDS PPI Node Manager Concurrence: Patricia J. Lawton Date MAG Ground Data System Staff 2 Table of Contents 1 Introduction ............................................................................................................................. 1 1.1 Distribution list ................................................................................................................... 1 1.2 Document change log ......................................................................................................... 2 1.3 TBD items ........................................................................................................................... 3 1.4 Abbreviations ...................................................................................................................... 4 1.5 Glossary .............................................................................................................................. 6 1.6 Juno Mission Overview ...................................................................................................... 7 1.7 Software Interface Specification Content Overview ......................................................... -

Investigations of Moon-Magnetosphere Interactions by the Europa Clipper Mission
EPSC Abstracts Vol. 13, EPSC-DPS2019-366-1, 2019 EPSC-DPS Joint Meeting 2019 c Author(s) 2019. CC Attribution 4.0 license. Investigations of Moon-Magnetosphere Interactions by the Europa Clipper Mission Haje Korth (1), Robert T. Pappalardo (2), David A. Senske (2), Sascha Kempf (3), Margaret G. Kivelson (4,5), Kurt Retherford (6), J. Hunter Waite (6), Joseph H. Westlake (1), and the Europa Clipper Science Team (1) Johns Hopkins University Applied Physics Laboratory, Maryland, USA, (2) Jet Propulsion Laboratory, California, USA, (3) University of Colorado, Colorado, USA, (4) University of Michigan, Michigan, USA, (5) University of California, California, USA, (6) Southwest Research Institute, Texas, USA. ([email protected]) 1. Introduction magnetic fields inducing eddy currents in the ocean. By measuring the induced field response at multiple The influence of the Jovian space environment on frequencies, the ice shell thickness and the ocean Europa is multifaceted, and observations of moon- layer thickness and conductivity can be uniquely magnetosphere interaction by the Europa Clipper will determined. The ECM consists of four fluxgate provide an understanding of the satellite’s interior sensors mounted on a 5-m-long boom and a control structure and compositional makeup among others. electronics hosted in a vault shielding it from The variability of Jupiter’s magnetic field at Europa radiation damage. The use of four sensors allows for induces electric currents within the moon’s dynamic removal of higher-order spacecraft- conducting ocean layer, the magnitude of which generated magnetic fields on a boom that is short depends on the ocean’s location, extent, and compared with the spacecraft dimensions. -

Learned Factor Graph-Based Models for Localizing Ground Penetrating Radar
Ground Encoding: Learned Factor Graph-based Models for Localizing Ground Penetrating Radar Alexander Baikovitz1, Paloma Sodhi1, Michael Dille2, Michael Kaess1 Learned sensor Correlation added to factor Estimation of system Abstract— We address the problem of robot localization using model graph of system poses trajectory ground penetrating radar (GPR) sensors. Current approaches x x ... x x for localization with GPR sensors require a priori maps of t-k-1 t-k t-1 t xt-k xt the system’s environment as well as access to approximate net global positioning (GPS) during operation. In this paper, T t-k,t we propose a novel, real-time GPR-based localization system GPR Submaps for unknown and GPS-denied environments. We model the localization problem as an inference over a factor graph. Our T ime t-k T ime t approach combines 1D single-channel GPR measurements to form 2D image submaps. To use these GPR images in the graph, we need sensor models that can map noisy, high- dimensional image measurements into the state space. These are challenging to obtain a priori since image generation has a complex dependency on subsurface composition and radar physics, which itself varies with sensors and variations in subsurface electromagnetic properties. Our key idea is to instead learn relative sensor models directly from GPR data that map non-sequential GPR image pairs to relative robot motion. These models are incorporated as factors within the Fig. 1: Estimating poses for a ground vehicle using subsurface measure- factor graph with relative motion predictions correcting for ments from Ground Penetrating Radar (GPR) as inference over a factor accumulated drift in the position estimates. -

A Lunar Micro Rover System Overview for Aiding Science and ISRU Missions Virtual Conference 19–23 October 2020 R
i-SAIRAS2020-Papers (2020) 5051.pdf A lunar Micro Rover System Overview for Aiding Science and ISRU Missions Virtual Conference 19–23 October 2020 R. Smith1, S. George1, D. Jonckers1 1STFC RAL Space, R100 Harwell Campus, OX11 0DE, United Kingdom, E-mail: [email protected] ABSTRACT the form of rovers and landers of various size [4]. Due to the costly nature of these missions, and the pressure Current science missions to the surface of other plan- for a guaranteed science return, they have been de- etary bodies tend to be very large with upwards of ten signed to minimise risk by using redundant and high instruments on board. This is due to high reliability re- reliability systems. This further increases mission cost quirements, and the desire to get the maximum science as components and subsystems are expected to be ex- return per mission. Missions to the lunar surface in the tensively qualified. next few years are key in the journey to returning hu- mans to the lunar surface [1]. The introduction of the As an example, the Mars Science Laboratory, nick- Commercial lunar Payload Services (CLPS) delivery named the Curiosity rover, one of the most successful architecture for science instruments and technology interplanetary rovers to date, has 10 main scientific in- demonstrators has lowered the barrier to entry of get- struments, requires a large team of people to control ting science to the surface [2]. Many instruments, and and cost over $2.5 billion to build and fly [5]. Curios- In Situ Surface Utilisation (ISRU) experiments have ity had 4 main science goals, with the instruments and been funded, and are being built with the intention of the design of the rover specifically tailored to those flying on already awarded CLPS missions. -

The Magsat Precision Vector Magnetometer
MARIO H. ACUNA THE MAGSAT PRECISION VECTOR MAGNETOMETER The Magsat preCISIon vector magnetometer was a state-of-the-art instrument that covered the range of ±64,OOO nanoteslas (nT) using a ±2000 nT basic magnetometer and digitally controlled current sources to increase its dynamic range. Ultraprecision components and extremely efficient designs minimized power consumption. INTRODUCTION stable and linear triaxial fluxgate magnetometer with a dynamic range of ±2000 nT (1 nT = 10-9 The instrumentation aboard the Magsat space weber per square meter). The principles of opera craft consisted of an alkali-vapor scalar magnetom tion of fluxgate magnetometers are well known and eter and a precision vector magnetometer. In addi will not be repeated here. The reader is directed to tion, information concerning the absolute orienta Refs. 1, 2, and 3 for further information concern tion of the spacecraft in inertial space was provided ing the detailed design of these instruments. by two star cameras, a precision sun sensor, and a To extend the range of the basic magnetometer system to determine the orientation of the sensor to the 64,000 nT required for Magsat, three digi platform, located at the tip of a 6 m boom, with tally controlled current sources with 7 bit resolution respect to a reference coordinate system on the and 17 bit accuracy were used to add or subtract spacecraft. automatically up to 128 bias steps of 1000 nT each. The two types of instruments flown aboard the The X, Y, and Z outputs of the magnetometer spacecraft provided complementary information were digitized by a 12 bit analog-to-digital con about the measured field. -

Mars Science Is Expanding Internationally Astrobiology
International Journal of Mars science is expanding internationally Astrobiology Rocco L. Mancinelli Ph.D cambridge.org/ija Editor-in-Chief, the International Journal of Astrobiology July 2020 marked the beginning of a busy year of Mars Exploration, that will culminate with Editorial the arrival of three spacecraft at Mars in February 2021. The three spacecraft, from the United Cite this article: Mancinelli RL (2021). Mars Arab Emirates, China and the United States are all primarily robotic missions that will join a science is expanding internationally. busy group of exploration spacecraft either in orbit or on the planet’s surface. International Journal of Astrobiology 20, The Emirati Hope orbiter, the first deep space explorer of the UAE, will be the first to arrive – 109 110. https://doi.org/10.1017/ on February 9th. The orbiter was developed through a partnership between Mohamed bin S1473550421000045 Rashid Space Centre (MBRSC), Laboratory for Atmospheric and Space Physics at the First published online: 16 February 2021 University of Colorado-Boulder, and Arizona State University (ASU). Hope has three instru- ments, two spectrometers and one exploration imager (high-resolution camera). One spec- trometer will determine the temperature of the planet through the Martian year, the other will measure the oxygen and hydrogen levels at ∼40,000 kilometers from the surface of Mars. The imager will also provide information on the ozone levels on the Red Planet. The orbiter will be active through one Martian year (two Earth years). Next will be China’s Tianwen-1 mission scheduled to arrive at Mars on February 10th. After orbiting the planet, it will send a lander containing a rover to the surface in May. -

Voyager 1 and 2 Data Show Entry of Interstellar Particles Into the Solar System
Voyager 1 and 2 Data Show Entry of Interstellar Particles into the Solar System The Magnetometer instrument on board the Voyagers measures the magnetic fields of solar origin in the heliosphere, defined as that region of space in which the principal constituents and dynamics are controlled by our Sun. The solar magnetic fields are carried into inter- planetary space by the supersonic and super-Alfvenic expansion of the solar atmosphere, known as the Solar Wind. Voyagers are currently measuring the weakest interplanetary magnetic fields ever detected, typically much less that 0.1 nT (nanoTesla). For comparison, the Earth's magnetic field at the equator is 30,000 nT so we are now measuring fields that are less than 3 millionths of the Earth's field. The field is very weak because the heliosphere is so big that the magnetic field must decrease in intensity according to fundamental laws of physics. The 2 Voyager spacecraft are at distances 55-65 times larger than the Earth is from the sun. It takes their radio signals more than 8 hours to reach Earth, traveling at the speed of light! Detection of Pressure Balance Structures A most significant new result has been the indirect detection of the local interstellar medium through which our entire solar system is moving. The magnetometer has discovered Pressure Balanced Structures in the highly correlated time variations of the magnetic fields and solar wind. These special plasma structures are an indirect but very important confirmation of the entry of interstellar neutral atoms into the heliosphere. They cannot be directly detected by any of the other instruments onboard the Voyager spacecraft. -
Revisiting Decades-Old Voyager 2 Data, Scientists Find One More Secret About Uranus 26 March 2020, by Miles Hatfield
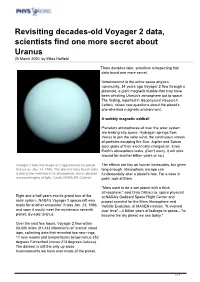
Revisiting decades-old Voyager 2 data, scientists find one more secret about Uranus 26 March 2020, by Miles Hatfield Three decades later, scientists reinspecting that data found one more secret. Unbeknownst to the entire space physics community, 34 years ago Voyager 2 flew through a plasmoid, a giant magnetic bubble that may have been whisking Uranus's atmosphere out to space. The finding, reported in Geophysical Research Letters, raises new questions about the planet's one-of-a-kind magnetic environment. A wobbly magnetic oddball Planetary atmospheres all over the solar system are leaking into space. Hydrogen springs from Venus to join the solar wind, the continuous stream of particles escaping the Sun. Jupiter and Saturn eject globs of their electrically-charged air. Even Earth's atmosphere leaks. (Don't worry, it will stick around for another billion years or so.) Voyager 2 took this image as it approached the planet The effects are tiny on human timescales, but given Uranus on Jan. 14, 1986. The planet’s hazy bluish color long enough, atmospheric escape can is due to the methane in its atmosphere, which absorbs fundamentally alter a planet's fate. For a case in red wavelengths of light. Credit: NASA/JPL-Caltech point, look at Mars. "Mars used to be a wet planet with a thick atmosphere," said Gina DiBraccio, space physicist Eight and a half years into its grand tour of the at NASA's Goddard Space Flight Center and solar system, NASA's Voyager 2 spacecraft was project scientist for the Mars Atmosphere and ready for another encounter. -

Precision Magnetometers for Aerospace Applications: a Review
sensors Review Precision Magnetometers for Aerospace Applications: A Review James S. Bennett 1,† , Brian E. Vyhnalek 2,†, Hamish Greenall 1 , Elizabeth M. Bridge 1 , Fernando Gotardo 1 , Stefan Forstner 1 , Glen I. Harris 1 , Félix A. Miranda 2,* and Warwick P. Bowen 1,* 1 School of Mathematics and Physics, The University of Queensland, St. Lucia, QLD 4072, Australia; [email protected] (J.S.B.); [email protected] (H.G.); [email protected] (E.M.B.); [email protected] (F.G.); [email protected] (S.F.); [email protected] (G.I.H.) 2 NASA Glenn Research Center, Cleveland, OH 44135, USA; [email protected] * Correspondence: [email protected] (F.A.M.); [email protected] (W.P.B.) † These authors contributed equally to this work. Abstract: Aerospace technologies are crucial for modern civilization; space-based infrastructure underpins weather forecasting, communications, terrestrial navigation and logistics, planetary observations, solar monitoring, and other indispensable capabilities. Extraplanetary exploration— including orbital surveys and (more recently) roving, flying, or submersible unmanned vehicles—is also a key scientific and technological frontier, believed by many to be paramount to the long-term survival and prosperity of humanity. All of these aerospace applications require reliable control of the craft and the ability to record high-precision measurements of physical quantities. Magnetometers deliver on both of these aspects and have been vital to the success of numerous missions. In this review Citation: Bennett, J.S.; Vyhnalek, paper, we provide an introduction to the relevant instruments and their applications.