Comparing Landsat and RADARSAT for Current and Historical Dynamic Flood Mapping
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A New Satellite, a New Vision
A New Satellite, a New Vision For more on RADARSAT-2 Canadian Space Agency Government RADARSAT Data Services 6767 Route de l’Aéroport Saint-Hubert, Quebec J3Y 8Y9 Tel.: 450-926-6452 [email protected] www.asc-csa.gc.ca MDA Geospatial Services 13800 Commerce Parkway Richmond, British Columbia V6V 2J3 Tel.: 604-244-0400 Toll free: 1-888-780-6444 [email protected] www.radarsat2.info Catalogue number ST99-13/2007 ISBN 978-1-100-15640-8 © Her Majesty the Queen in right of Canada, 2010 TNA H E C A D I A N SPA C E A G E N C Y A N D E A R T H O B S E R VAT I O N For a better understanding of our ocean, atmosphere, and land environments and how they interact, we need high-quality data provided by Earth observation satellites. RADARSAT-2 offers commercial and government users one of the world’s most advanced sources of space-borne radar imagery. It is the first commercial radar satellite to offer polarimetry, a capability that aids in identifying a wide variety of surface features and targets. To expand Canada’s technology leadership in Earth observation, the Canadian Space Agency is working with national and international partners on shared objectives to enhance • northern and remote-area surveillance • marine operations and oil spill monitoring • environmental monitoring and natural resource management • security and the protection of sovereignty • emergency and disaster management RADARSAT-2 is the next Canadian Earth observation success story. It is the result of collaboration between the Canadian Space Agency and the company MDA. -

The RADARSAT-Constellation Mission (RCM)
The RADARSAT-Constellation Mission (RCM) Dr. Heather McNairn Science and Technology Branch, ORDC [email protected] Daniel De Lisle RADARSAT Constellation Mission Manager Canadian Space Agency [email protected] Why Synthetic Aperture Radar (SAR)? The Physics: • At microwave frequencies, energy causes alignment of dipoles (sensitive to number of water molecules in target) • Characteristics of structure in target impacts how microwaves scatter (sensitive to roughness and canopy structure) The Operations: • At wavelengths of centimetres to metres in length, microwaves are unaffected by cloud cover and haze • As active sensors, SARs generate their own source of energy; can operate day or night and under low illumination conditions The Reality for Agriculture: • The backscatter intensity and scattering characteristics can be used to estimate amount of water in soils and crops, and tell us something about the type and condition of crops • The near-assurance of data collection is critical for time sensitive applications, in times of emergency (i.e. flooding), risk (i.e. disease), and for consistent measures over the entire growing season (i.e. monitoring crop condition) Why a RADARSAT Constellation? • The use of C-Band SAR has increased significantly since the launch of RADARSAT-1 • Many Government of Canada users have developed operational applications that deliver information and products to Canadians and the international community, based on RADARSAT • This constellation ensures C-Band continuity with improved system reliability, primarily to support current and future operational users • RCM is a government-owned mission, tailored to respond to Canadian Government needs for maritime surveillance, disaster management and ecosystem monitoring Improved stream flow forecasts1 Estimates of crop biomass2 AAFC’s annual crop inventory Produced by ACGEO Contact: [email protected] 1Bhuiyan, H.A.K.M, McNairn, H., Powers, J., and Merzouki, A. -

RADARSAT-2 Provides Polarized Data, and Is the first RADARSAT-2 Spaceborne Commercial SAR to Offer Polarimetry Data
R RADARSAT-1. RADARSAT-2 provides polarized data, and is the first RADARSAT-2 spaceborne commercial SAR to offer polarimetry data. The intent here is not to outline polarimetry theory, but to present the concepts in an intuitive manner so that those not familiar with RADARSAT-2, the second in a series of Canadian spaceborne Synthetic polarimetry can understand the benefits of polarimetry and the infor- Aperture Radar (SAR) satellites, was built by MacDonald Dettwiler, mation available in polarimetry data. Many articles are available that Richmond, Canada. RADARSAT-2, jointly funded by the Canadian discuss polarimetry theory, applications, and provide excellent back- Space Agency and MacDonald Dettwiler, represents a good example of ground information (Ulaby and Elachi, 1990; Touzi et al. 2004). public–private partnerships. RADARSAT-2 builds on the heritage of the Notwithstanding the inherent complexity of polarimetry, polarimetry RADARSAT-1 SAR satellite, which was launched in 1995. RADARSAT- in its simplest terms refers to the orientation of the radar wave relative 2 will be a single-sensor polarimetric C-band SAR (5.405 GHz). to the earth’s surface and the phase information between polarization RADARSAT-2 retains the same capability as RADARSAT-1. configurations. Morena et al., 2004 For example, the RADARSAT-2 has the same RADARSAT-1 is horizontally polarized meaning the radar wave (the imaging modes as RADARSAT-1, and as well, the orbit parameters will electric component of the radar wave) is horizontal to the earth’s sur- be the same thus allowing co-registration of RADARSAT-1 and face (Figure R1). In contrast, the ERS SAR sensor was vertically polar- RADARSAT-2 images. -

Canadian Progress Toward Marine and Coastal Applications of Synthetic Aperture Radar
MARINE AND COASTAL APPLICATIONS OF SAR Canadian Progress Toward Marine and Coastal Applications of Synthetic Aperture Radar Paris W. Vachon, Paul Adlakha, Howard Edel, Michael Henschel, Bruce Ramsay, Dean Flett, Maria Rey, Gordon Staples, and Sylvia Thomas With Radarsat-1 presently in operation and Radarsat-2 approved, Canada is starting to develop synthetic aperture radar (SAR) applications that require imagery on an operational schedule. Sea ice surveillance is now a proven near–real-time application, and new marine and coastal roles for SAR imagery are emerging. Although some image quality and calibration issues remain to be addressed, ship detection and coastal wind field retrieval are now in demonstration phases, with significant participation from the Canadian private sector. (Keywords: Ice, Ocean, SAR, Ship, Wind.) INTRODUCTION The development of marine and coastal synthetic Inc.’s Ocean Monitoring Workstation (OMW) and aperture radar (SAR) applications in Canada has to IOSAT, Inc.’s Sentry, a transportable satellite ground date involved data from platforms such as the CV-580 station. In addition, the imaging of meteorological fea- airborne SAR, the European Remote Sensing (ERS) tures in SAR images over the ocean presents new satellite SARs, and the Radarsat SAR in research, dem- opportunities for both research and new operational onstration, and operational roles. An emerging theme applications. To better cater to the needs of offshore is the development of new operational applications as data users, Radarsat International, the commercial we approach the Envisat and Radarsat-2 eras. These Radarsat data distributor, has introduced new services new sensors will broaden the observation space (in for data programming, processing, and delivery. -

RADARSAT-1 Standard Beam SAR Images Summary: This Data Set Is Derived from the Alaska SAR Facility's Archive of RADARSAT-1 Standard Beam SAR Data
RADARSAT-1 Standard Beam SAR Images Summary: This data set is derived from the Alaska SAR Facility's archive of RADARSAT-1 Standard Beam SAR data. These data have been archived since shortly after the RADARSAT-1 launch in November 1995, with regular archiving starting in June 1996 after the commissioning phase was completed. The data represent how strongly the Earth's surface backscattered C-Band (5.66 cm wavelength) radar signals (see the SAR FAQ for more details). Most of the data cover ASF's station mask, approximated by a circle with radius 3000 km centered at Fairbanks, Alaska. ASF also archives data received at the McMurdo Station in Antarctica. Through ASF, approved U.S. RADARSAT-1 SAR researchers may obtain RADARSAT-1 data obtained by other ground stations and have that data processed at ASF as well. This foreign ground station data becomes part of the ASF data archive and is eventually available for order by other ASF approved researchers. RADARSAT-1 carries two tape recorders, each capable of recording 10 minutes of SAR data, so ASF also archives a significant amount of recorded out-of-mask data. The RADARSAT-1 Antarctic Mapping Mission (AMM) data represent one such example. In Antarctic mode, the RADARSAT-1 satellite was rotated such that the SAR was left-looking. RADARSAT-1 then recorded SAR data over the Antarctic continent and downlinked that data to ASF for processing and storage. The entire Antarctic continent was mapped. The AMM data is described more fully in the document for Radarsat-1 Standard Beam Left Looking RAMP Images. -
RADARSAT-2 Data
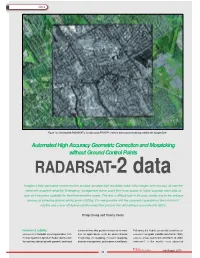
Article Figure 1a: Orthorectified RADARSAT-2 U2 data using RFM/RPC method without post-processing overlaid with Google Earth Automated High Accuracy Geometric Correction and Mosaicking without Ground Control Points RADARSAT-2 data Imagine a fully automated system used to produce accurate high resolution radar ortho-images and -mosaics all over the world with excellent reliability! Emergency management teams could then have access to highly-accurate radar data as soon as it becomes available for their time-sensitive needs. This was a difficult task in the past, mainly due to the arduous process of collecting ground control points (GCPs). It is now possible with the successful operation of the RADARSAT-2 satellite and a new 3D hybrid satellite model that process this data without user-collected GCPs. Philip Cheng and Thierry Toutin RADARSAT-2 satellite advancements that provide enhanced informa- Following the highly successful predecessor RADARSAT-2 is Canada’s second-generation com- tion for applications such as environmental RADARSAT-1 program (satellite launched in 1995), mercial Synthetic Aperture Radar (SAR) satel- monitoring, ice mapping, resource mapping, RADARSAT-2 was launched in December 14, 2007. lite and was designed with powerful technical disaster management, and marine surveillance. RADARSAT-2 is the world’s most advanced July/August 2010 22 Article Figure 1b: Orthorectified RADARSAT-2 U2 data using Toutin’s hybrid method without post-processing overlaid with Google Earth commercial C-band SAR satellite and heralds a Geometric Correction of RADARSAT-2 Since the RADARSAT-2 satellite has multiple GPS new era in satellite performance, imaging flexi- Data receivers on board with accurate real-time bility and product selection and service offer- For most SAR applications, it is required to positioning, this information could potentially ings. -

Application Potentials of the Planned RADARSAT Constellation Abstract
Application Potentials of the planned RADARSAT Constellation Dirk Geudtner and Guy Séguin Canadian Space Agency (CSA), Space Technologies/Spacecraft Payloads 6767, route de l' Aeroport, Saint-Hubert QC, J3Y 8Y9, Canada Email: [email protected] Abstract The CSA is conducting a feasibility study on a constellation of low-cost small SAR satellites to ensure C-band data continuity beyond RADARSAT-2. The goal is to provide operationally SAR imagery for key maritime surveillance applications such as ship detection, oil spill monitoring, and sea ice mapping. Other applications focus on disaster management and SAR interferometry (InSAR) coherent change detection of land surfaces for geohazards, climate change, and environment monitoring. This paper provides an overview of the mission concept with a special focus on the application potential of the planned RADARSAT constellation. 1 Introduction The Canadian Space Agency (CSA) is currently conducting a feasibility study on the development of a C-band SAR satellite constellation referred to as RADARSAT Constellation Mission (RCM). This is a follow-on project to the RADARSAT-2 program. For the implementation of the RCM a new approach is being used, which focuses on the use of low-cost small-satellites flying in a constellation configuration [1]. The main objective of the RCM is to ensure C-band SAR data continuity beyond RADARSAT-2 and to provide SAR imagery for operational applications and services. The current concept involves three satellites with an option of flying up to six satellites. This is to meet specific revisit and coverage requirements defined by operational users in Canada for time-critical maritime surveillance applications such as ship detection, oil spill monitoring, and sea ice mapping. -

Remote Sensing- Continued (8B) Satellite Sensors Best Bands Per Category LANDSAT Bands
Satellite Sensors Remote Sensing- Continued (8b) Satellite Sensor Satellites and their images NOAA AVHRR LANDSAT MSS LANDSAT TM SPOT HRV(multispectral) SPOT HRV(panchromatic) NIMBUS-7 CZCS GOES VISSR TERRA ASTER TERRA CERES TERRA MISR TERRA MODIS TERRA MOPITT Different remote sensing instruments record different segments, or bands, of the electromagnetic spectrum. Best bands per Category Electro-Optical Scanners LANDSAT Bands LANDSAT – Earth Resources Technology Satellite (ERTS) SPOT - Systeme Pour l’Observation de la Terre CZCS - Coastal Zone Color Scanner NOAA - Advanced Very High Resolution Radiometer (AVHRR) GOES - Geostationary Operational Env Satellites LANDSAT 1,2&3 LANDSAT 4 & 5 Multispectral Scanner System (MSS) Multispectral Scanner System (MSS) instrument Thematic Mapper (TM). LANDSAT 7 Sun-synchronous Orbit Launch Date: April 15, 1999 Status: operational despite Scan Line Corrector (SLC) failure May 31, 2003 Sensors:ETM+ Altitude: 705 km This orbit is a special case of the Inclination: 98.2° polar orbit. Like a polar orbit, the Orbit: polar, sun-synchronous satellite travels from the north to the Equatorial Crossing Time: nominally 10 AM (± 15 min.) local time south poles as the Earth turns below (descending node) it. Period of Revolution : 99 minutes; ~14.5 orbits/day In a sun-synchronous orbit, though, Repeat Coverage : 16 days the satellite passes over the same part of the Earth at roughly the same local time each day. Space Satellites that help Firefighters Sun-synchronous Orbits Monitor Raging Wildfires Orbit that passes over the earth at the same local sun NASA’s Total Ozone Mapping Spectrometer (TOMS). time. Sea-viewing Wide Field-of-view Sensor (SeaWiFS). -

English Only
A/AC.105/C.1/2021/CRP.4 19 April 2021 English only Committee on the Peaceful Uses of Outer Space Scientific and Technical Subcommittee Fifty-eighth session Vienna, 19–30 April 2021 International cooperation in the peaceful uses of outer space: activities of Member States Note by the Secretariat I. Introduction 1. At its fifty-seventh session, in 2020, the Scientific and Technical Subcommittee of the Committee on the Peaceful Uses of Outer Space recommended that the Secretariat continue to invite Member States to submit annual reports on their space activities (A/AC.105/1224, para. 34). 2. In a note verbale dated 16 October 2020, the Office for Outer Space Affairs of the Secretariat invited Member States to submit their reports by 13 November 2020. The present conference room paper was prepared by the Secretariat on the basis of a reply received in response to that invitation. II. Reply received from a Member State Canada [Original: English] [23 March 2021] Summary: Canada engaged in a diverse range of space activities in 2020, highlights include: Canadarm2’s contributions to the International Space Station (ISS) operations; contributing to the high-resolution measurements of the atmosphere and advancing global research in greenhouse gases; modernizing and renewing its funding mechanism related to Earth observation applications development through the smartEarth initiative; and awarding more than 35 grants to Canadian universities through the Science, Technology and Expertise Development in Academia (STEDiA) program, $18.8M CAD to support the advancement of 55 commercially promising technologies in various space domains through the Space Technology Development Program (STDP), and $4.4M CAD to over 25 space-related research projects in V.21-02492 (E) *2102492* A/AC.105/C.1/2021/CRP.4 Canadian post-secondary institutions through the Flights and Fieldwork for the Advancement of Science and Technology (FAST) funding initiative. -
An Approach to Lineament Analysis for Groundwater Exploration in Nicaragua
An Approach to Lineament Analysis for Groundwater Exploration in Nicaragua Jill N. Bruning, John S. Gierke, and Ann L. Maclean Abstract 2004; Hung et al., 2005; Murphy and Burgess, 2005; Wells in bedrock aquifers tend to yield more water where Khan and Glenn, 2006; Meijerink et al., 2007). There is no they intersect fracture networks. Lineament analysis using well-accepted or proven protocol for mapping lineaments, nor satellite imagery was employed to identify surface expres- have different approaches been compared in non-ideal sions of subsurface fracturing for possible new well loca- regions. The technical aim of this work brings together tions. An imagery integration approach was developed to different data-processing tools, such as ERDAS Imagine® and evaluate satellite imagery for lineament analysis in terrain ArcMAP®, in conjunction with a variety of satellite images where the influences of human development and vegetation (QuickBird, Landsat-7 ETMϩ, ASTER, and RADARSAT-1), field confound lineament interpretation. Four satellite sensors observations, geological and topographic maps, and a DEM in (ASTER, Landsat-7 ETMϩ, QuickBird, RADARSAT-1) and a DEM order to compare lineament interpretations derived from were used for lineament mapping a volcanic region of multiple sources in a rural municipality location in Nicaragua. Image processing and interpretations obtained 12 Nicaragua. complementary products, which were synthesized into a raster image of lineament-zone coincidence for creating a Previous Work lineament delineation map. Nine of the 11 previously Lineament identification was first performed with aerial mapped faults were identified from the coincidence-based photography and first generation satellite imagery using map along with 26 new lineaments. -

A Comparison of Landsat, Ikonos and Radarsat Satellite Imagery for Suburban Land Cover Mapping in the Township of Langley, British Columbia
A COMPARISON OF LANDSAT, IKONOS AND RADARSAT SATELLITE IMAGERY FOR SUBURBAN LAND COVER MAPPING IN THE TOWNSHIP OF LANGLEY, BRITISH COLUMBIA Sarbjeet Kaur Mann B.Sc., University of Victoria 1999 RESEARCH PROJECT SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTEROFRESOURCEMANAGEMENT in the School of Resource and Environmental Management Report No. 356 O Sarbjeet Kaur Mann 2004 SIMON FRASER UNIVERSITY April 2004 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author Approval Name: Sarbjeet Kaur Mann Degree: Master of Resource Management Title of Research Project: A comparison of Landsat, IKONOS and RADARSAT satellite imagery for suburban land cover mapping in the Township of Langley, British Columbia Report No. Examining Committee: Chair: Marcela Olguin-Alvarez Dr. Kristina D. Rothley, Assistant Professor School of Resource and Environmental Management Simon Fraser University Senior Supervisor Dr. Suzana Dragicevic, Assistant Professor Department of Geography Simon Fraser University Committee Member Pamela Zevit, Co-ordinator Greater Vancouver Region Biodiversity Strategy BC Ministry of Water, Land & Air Protection Committee Member Date Approved: Partial Copyright Licence The author, whose copyright is declared on the title page of this work, has granted to Simon Fraser University the right to lend this thesis, project or extended essay to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. -
Moving to the RADARSAT Constellation Mission
remote sensing Article Moving to the RADARSAT Constellation Mission: Comparing Synthesized Compact Polarimetry and Dual Polarimetry Data with Fully Polarimetric RADARSAT-2 Data for Image Classification of Peatlands Lori White 1,*, Koreen Millard 2,3, Sarah Banks 1, Murray Richardson 2, Jon Pasher 1 and Jason Duffe 1 1 Environment and Climate Change Canada, National Wildlife Research Centre, 1125 Colonel by Drive, Ottawa, ON K1S 5B6, Canada; [email protected] (S.B.); [email protected] (J.P.); [email protected] (J.D.) 2 Department of Geography and Environmental Studies, Carleton University, 1125 colonel By Drive, Ottawa, ON K1S 5B6, Canada; [email protected] or [email protected] (K.M.); [email protected] (M.R.) 3 Defence Research and Development Canada (DRDC), Ottawa Research Center, 3701 Carling Ave., Ottawa, ON K2K 2Y7, Canada * Correspondence: [email protected]; Tel.: +1-613-990-9952 Academic Editors: Deepak R. Mishra and Prasad S. Thenkabail Received: 7 April 2017; Accepted: 4 June 2017; Published: 7 June 2017 Abstract: For this research, the Random Forest (RF) classifier was used to evaluate the potential of simulated RADARSAT Constellation Mission (RCM) data for mapping landcover within peatlands. Alfred Bog, a large peatland complex in Southern Ontario, was used as a test case. The goal of this research was to prepare for the launch of the upcoming RCM by evaluating three simulated RCM polarizations for mapping landcover within peatlands. We examined (1) if a lower RCM noise equivalent sigma zero (NESZ) affects classification accuracy, (2) which variables are most important for classification, and (3) whether classification accuracy is affected by the use of simulated RCM data in place of the fully polarimetric RADARSAT-2.