Asteroid Lightcurve Inversion with Bayesian Inference K
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Minor Planet Bulletin
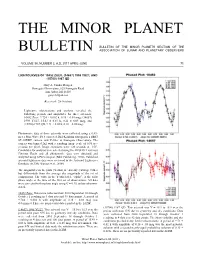
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 36, NUMBER 3, A.D. 2009 JULY-SEPTEMBER 77. PHOTOMETRIC MEASUREMENTS OF 343 OSTARA Our data can be obtained from http://www.uwec.edu/physics/ AND OTHER ASTEROIDS AT HOBBS OBSERVATORY asteroid/. Lyle Ford, George Stecher, Kayla Lorenzen, and Cole Cook Acknowledgements Department of Physics and Astronomy University of Wisconsin-Eau Claire We thank the Theodore Dunham Fund for Astrophysics, the Eau Claire, WI 54702-4004 National Science Foundation (award number 0519006), the [email protected] University of Wisconsin-Eau Claire Office of Research and Sponsored Programs, and the University of Wisconsin-Eau Claire (Received: 2009 Feb 11) Blugold Fellow and McNair programs for financial support. References We observed 343 Ostara on 2008 October 4 and obtained R and V standard magnitudes. The period was Binzel, R.P. (1987). “A Photoelectric Survey of 130 Asteroids”, found to be significantly greater than the previously Icarus 72, 135-208. reported value of 6.42 hours. Measurements of 2660 Wasserman and (17010) 1999 CQ72 made on 2008 Stecher, G.J., Ford, L.A., and Elbert, J.D. (1999). “Equipping a March 25 are also reported. 0.6 Meter Alt-Azimuth Telescope for Photometry”, IAPPP Comm, 76, 68-74. We made R band and V band photometric measurements of 343 Warner, B.D. (2006). A Practical Guide to Lightcurve Photometry Ostara on 2008 October 4 using the 0.6 m “Air Force” Telescope and Analysis. Springer, New York, NY. located at Hobbs Observatory (MPC code 750) near Fall Creek, Wisconsin. -

PACS Sky Fields and Double Sources for Photometer Spatial Calibration
Document: PACS-ME-TN-035 PACS Date: 27th July 2009 Herschel Version: 2.7 Fields and Double Sources for Spatial Calibration Page 1 PACS Sky Fields and Double Sources for Photometer Spatial Calibration M. Nielbock1, D. Lutz2, B. Ali3, T. M¨uller2, U. Klaas1 1Max{Planck{Institut f¨urAstronomie, K¨onigstuhl17, D-69117 Heidelberg, Germany 2Max{Planck{Institut f¨urExtraterrestrische Physik, Giessenbachstraße, D-85748 Garching, Germany 3NHSC, IPAC, California Institute of Technology, Pasadena, CA 91125, USA Document: PACS-ME-TN-035 PACS Date: 27th July 2009 Herschel Version: 2.7 Fields and Double Sources for Spatial Calibration Page 2 Contents 1 Scope and Assumptions 4 2 Applicable and Reference Documents 4 3 Stars 4 3.1 Optical Star Clusters . .4 3.2 Bright Binaries (V -band search) . .5 3.3 Bright Binaries (K-band search) . .5 3.4 Retrieval from PACS Pointing Calibration Target List . .5 3.5 Other stellar sources . 13 3.5.1 Herbig Ae/Be stars observed with ISOPHOT . 13 4 Galactic ISOCAM fields 13 5 Galaxies 13 5.1 Quasars and AGN from the Veron catalogue . 13 5.2 Galaxy pairs . 14 5.2.1 Galaxy pairs from the IRAS Bright Galaxy Sample with VLA radio observations 14 6 Solar system objects 18 6.1 Asteroid conjunctions . 18 6.2 Conjunctions of asteroids with pointing stars . 22 6.3 Planetary satellites . 24 Appendices 26 A 2MASS images of fields with suitable double stars from the K-band 26 B HIRES/2MASS overlays for double stars from the K-band search 32 C FIR/NIR overlays for double galaxies 38 C.1 HIRES/2MASS overlays for double galaxies . -
Alactic Observer Gjohn J
alactic Observer GJohn J. McCarthy Observatory Volume 5, No. 2 February 2012 Belly of the Beast At the center of the Milky Way galaxy, a gas cloud is on a perilous journey into a supermassive black hole. As the cloud stretches and accelerates, it gives away the location of its silent predator. For more information , see page 9 inside, or go to http://www.nasa.gov/ centers/goddard/news/topstory/2008/ blackhole_slumber.html. Credit: NASA/CXC/MIT/Frederick K. Baganoff et al. The John J. McCarthy Observatory Galactic Observvvererer New Milford High School Editorial Committee 388 Danbury Road Managing Editor New Milford, CT 06776 Bill Cloutier Phone/Voice: (860) 210-4117 Production & Design Phone/Fax: (860) 354-1595 Allan Ostergren www.mccarthyobservatory.org Website Development John Gebauer JJMO Staff Marc Polansky It is through their efforts that the McCarthy Observatory has Josh Reynolds established itself as a significant educational and recreational Technical Support resource within the western Connecticut community. Bob Lambert Steve Barone Allan Ostergren Dr. Parker Moreland Colin Campbell Cecilia Page Dennis Cartolano Joe Privitera Mike Chiarella Bruno Ranchy Jeff Chodak Josh Reynolds Route Bill Cloutier Barbara Richards Charles Copple Monty Robson Randy Fender Don Ross John Gebauer Ned Sheehey Elaine Green Gene Schilling Tina Hartzell Diana Shervinskie Tom Heydenburg Katie Shusdock Phil Imbrogno Jon Wallace Bob Lambert Bob Willaum Dr. Parker Moreland Paul Woodell Amy Ziffer In This Issue THE YEAR OF THE SOLAR SYSTEM ................................ 4 SUNRISE AND SUNSET .................................................. 11 OUT THE WINDOW ON YOUR LEFT ............................... 5 ASTRONOMICAL AND HISTORICAL EVENTS ...................... 11 FRA MAURA ................................................................ 5 REFERENCES ON DISTANCES ....................................... -

Asteroid Regolith Weathering: a Large-Scale Observational Investigation
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Doctoral Dissertations Graduate School 5-2019 Asteroid Regolith Weathering: A Large-Scale Observational Investigation Eric Michael MacLennan University of Tennessee, [email protected] Follow this and additional works at: https://trace.tennessee.edu/utk_graddiss Recommended Citation MacLennan, Eric Michael, "Asteroid Regolith Weathering: A Large-Scale Observational Investigation. " PhD diss., University of Tennessee, 2019. https://trace.tennessee.edu/utk_graddiss/5467 This Dissertation is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Doctoral Dissertations by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a dissertation written by Eric Michael MacLennan entitled "Asteroid Regolith Weathering: A Large-Scale Observational Investigation." I have examined the final electronic copy of this dissertation for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Doctor of Philosophy, with a major in Geology. Joshua P. Emery, Major Professor We have read this dissertation and recommend its acceptance: Jeffrey E. Moersch, Harry Y. McSween Jr., Liem T. Tran Accepted for the Council: Dixie L. Thompson Vice Provost and Dean of the Graduate School (Original signatures are on file with official studentecor r ds.) Asteroid Regolith Weathering: A Large-Scale Observational Investigation A Dissertation Presented for the Doctor of Philosophy Degree The University of Tennessee, Knoxville Eric Michael MacLennan May 2019 © by Eric Michael MacLennan, 2019 All Rights Reserved. -

Aqueous Alteration on Main Belt Primitive Asteroids: Results from Visible Spectroscopy1
Aqueous alteration on main belt primitive asteroids: results from visible spectroscopy1 S. Fornasier1,2, C. Lantz1,2, M.A. Barucci1, M. Lazzarin3 1 LESIA, Observatoire de Paris, CNRS, UPMC Univ Paris 06, Univ. Paris Diderot, 5 Place J. Janssen, 92195 Meudon Pricipal Cedex, France 2 Univ. Paris Diderot, Sorbonne Paris Cit´e, 4 rue Elsa Morante, 75205 Paris Cedex 13 3 Department of Physics and Astronomy of the University of Padova, Via Marzolo 8 35131 Padova, Italy Submitted to Icarus: November 2013, accepted on 28 January 2014 e-mail: [email protected]; fax: +33145077144; phone: +33145077746 Manuscript pages: 38; Figures: 13 ; Tables: 5 Running head: Aqueous alteration on primitive asteroids Send correspondence to: Sonia Fornasier LESIA-Observatoire de Paris arXiv:1402.0175v1 [astro-ph.EP] 2 Feb 2014 Batiment 17 5, Place Jules Janssen 92195 Meudon Cedex France e-mail: [email protected] 1Based on observations carried out at the European Southern Observatory (ESO), La Silla, Chile, ESO proposals 062.S-0173 and 064.S-0205 (PI M. Lazzarin) Preprint submitted to Elsevier September 27, 2018 fax: +33145077144 phone: +33145077746 2 Aqueous alteration on main belt primitive asteroids: results from visible spectroscopy1 S. Fornasier1,2, C. Lantz1,2, M.A. Barucci1, M. Lazzarin3 Abstract This work focuses on the study of the aqueous alteration process which acted in the main belt and produced hydrated minerals on the altered asteroids. Hydrated minerals have been found mainly on Mars surface, on main belt primitive asteroids and possibly also on few TNOs. These materials have been produced by hydration of pristine anhydrous silicates during the aqueous alteration process, that, to be active, needed the presence of liquid water under low temperature conditions (below 320 K) to chemically alter the minerals. -
The Minor Planet Bulletin
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 38, NUMBER 2, A.D. 2011 APRIL-JUNE 71. LIGHTCURVES OF 10452 ZUEV, (14657) 1998 YU27, AND (15700) 1987 QD Gary A. Vander Haagen Stonegate Observatory, 825 Stonegate Road Ann Arbor, MI 48103 [email protected] (Received: 28 October) Lightcurve observations and analysis revealed the following periods and amplitudes for three asteroids: 10452 Zuev, 9.724 ± 0.002 h, 0.38 ± 0.03 mag; (14657) 1998 YU27, 15.43 ± 0.03 h, 0.21 ± 0.05 mag; and (15700) 1987 QD, 9.71 ± 0.02 h, 0.16 ± 0.05 mag. Photometric data of three asteroids were collected using a 0.43- meter PlaneWave f/6.8 corrected Dall-Kirkham astrograph, a SBIG ST-10XME camera, and V-filter at Stonegate Observatory. The camera was binned 2x2 with a resulting image scale of 0.95 arc- seconds per pixel. Image exposures were 120 seconds at –15C. Candidates for analysis were selected using the MPO2011 Asteroid Viewing Guide and all photometric data were obtained and analyzed using MPO Canopus (Bdw Publishing, 2010). Published asteroid lightcurve data were reviewed in the Asteroid Lightcurve Database (LCDB; Warner et al., 2009). The magnitudes in the plots (Y-axis) are not sky (catalog) values but differentials from the average sky magnitude of the set of comparisons. The value in the Y-axis label, “alpha”, is the solar phase angle at the time of the first set of observations. All data were corrected to this phase angle using G = 0.15, unless otherwise stated. -

The Minor Planet Bulletin
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 35, NUMBER 3, A.D. 2008 JULY-SEPTEMBER 95. ASTEROID LIGHTCURVE ANALYSIS AT SCT/ST-9E, or 0.35m SCT/STL-1001E. Depending on the THE PALMER DIVIDE OBSERVATORY: binning used, the scale for the images ranged from 1.2-2.5 DECEMBER 2007 – MARCH 2008 arcseconds/pixel. Exposure times were 90–240 s. Most observations were made with no filter. On occasion, e.g., when a Brian D. Warner nearly full moon was present, an R filter was used to decrease the Palmer Divide Observatory/Space Science Institute sky background noise. Guiding was used in almost all cases. 17995 Bakers Farm Rd., Colorado Springs, CO 80908 [email protected] All images were measured using MPO Canopus, which employs differential aperture photometry to determine the values used for (Received: 6 March) analysis. Period analysis was also done using MPO Canopus, which incorporates the Fourier analysis algorithm developed by Harris (1989). Lightcurves for 17 asteroids were obtained at the Palmer Divide Observatory from December 2007 to early The results are summarized in the table below, as are individual March 2008: 793 Arizona, 1092 Lilium, 2093 plots. The data and curves are presented without comment except Genichesk, 3086 Kalbaugh, 4859 Fraknoi, 5806 when warranted. Column 3 gives the full range of dates of Archieroy, 6296 Cleveland, 6310 Jankonke, 6384 observations; column 4 gives the number of data points used in the Kervin, (7283) 1989 TX15, 7560 Spudis, (7579) 1990 analysis. Column 5 gives the range of phase angles. -

(2000) Forging Asteroid-Meteorite Relationships Through Reflectance
Forging Asteroid-Meteorite Relationships through Reflectance Spectroscopy by Thomas H. Burbine Jr. B.S. Physics Rensselaer Polytechnic Institute, 1988 M.S. Geology and Planetary Science University of Pittsburgh, 1991 SUBMITTED TO THE DEPARTMENT OF EARTH, ATMOSPHERIC, AND PLANETARY SCIENCES IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY IN PLANETARY SCIENCES AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY FEBRUARY 2000 © 2000 Massachusetts Institute of Technology. All rights reserved. Signature of Author: Department of Earth, Atmospheric, and Planetary Sciences December 30, 1999 Certified by: Richard P. Binzel Professor of Earth, Atmospheric, and Planetary Sciences Thesis Supervisor Accepted by: Ronald G. Prinn MASSACHUSES INSTMUTE Professor of Earth, Atmospheric, and Planetary Sciences Department Head JA N 0 1 2000 ARCHIVES LIBRARIES I 3 Forging Asteroid-Meteorite Relationships through Reflectance Spectroscopy by Thomas H. Burbine Jr. Submitted to the Department of Earth, Atmospheric, and Planetary Sciences on December 30, 1999 in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Planetary Sciences ABSTRACT Near-infrared spectra (-0.90 to ~1.65 microns) were obtained for 196 main-belt and near-Earth asteroids to determine plausible meteorite parent bodies. These spectra, when coupled with previously obtained visible data, allow for a better determination of asteroid mineralogies. Over half of the observed objects have estimated diameters less than 20 k-m. Many important results were obtained concerning the compositional structure of the asteroid belt. A number of small objects near asteroid 4 Vesta were found to have near-infrared spectra similar to the eucrite and howardite meteorites, which are believed to be derived from Vesta. -

INPOP08, a 4-D Planetary Ephemeris: from Asteroid and Time-Scale Computations to ESA Mars Express and Venus Express Contributions
A&A 507, 1675–1686 (2009) Astronomy DOI: 10.1051/0004-6361/200911755 & c ESO 2009 Astrophysics INPOP08, a 4-D planetary ephemeris: from asteroid and time-scale computations to ESA Mars Express and Venus Express contributions A. Fienga1,2, J. Laskar1,T.Morley3,H.Manche1, P. Kuchynka1, C. Le Poncin-Lafitte4, F. Budnik3, M. Gastineau1, and L. Somenzi1,2 1 Astronomie et Systèmes Dynamiques, IMCCE-CNRS UMR8028, 77 Av. Denfert-Rochereau, 75014 Paris, France 2 Observatoire de Besançon, CNRS UMR6213, 41bis Av. de l’Observatoire, 25000 Besançon, France e-mail: [email protected] 3 ESOC, Robert-Bosch-Str. 5, Darmstadt 64293, Germany 4 SYRTE, CNRS UMR8630, Observatoire de Paris, 77 Av. Denfert-Rochereau, 75014 Paris, France Received 31 January 2009 / Accepted 24 August 2009 ABSTRACT The latest version of the planetary ephemerides developed at the Paris Observatory and at the Besançon Observatory is presented. INPOP08 is a 4-dimension ephemeris since it provides positions and velocities of planets and the relation between Terrestrial Time and Barycentric Dynamical Time. Investigations to improve the modeling of asteroids are described as well as the new sets of observations used for the fit of INPOP08. New observations provided by the European Space Agency deduced from the tracking of the Mars Express and Venus Express missions are presented as well as the normal point deduced from the Cassini mission. We show importance of these observations in the fit of INPOP08, especially in terms of Venus, Saturn and Earth-Moon barycenter orbits. Key words. ephemerides – astrometry – time – minor planets, asteroids – solar system: general – space vehicules 1. -

The Minor Planet Bulletin 36, 188-190
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 37, NUMBER 3, A.D. 2010 JULY-SEPTEMBER 81. ROTATION PERIOD AND H-G PARAMETERS telescope (SCT) working at f/4 and an SBIG ST-8E CCD. Baker DETERMINATION FOR 1700 ZVEZDARA: A independently initiated observations on 2009 September 18 at COLLABORATIVE PHOTOMETRY PROJECT Indian Hill Observatory using a 0.3-m SCT reduced to f/6.2 coupled with an SBIG ST-402ME CCD and Johnson V filter. Ronald E. Baker Benishek from the Belgrade Astronomical Observatory joined the Indian Hill Observatory (H75) collaboration on 2009 September 24 employing a 0.4-m SCT PO Box 11, Chagrin Falls, OH 44022 USA operating at f/10 with an unguided SBIG ST-10 XME CCD. [email protected] Pilcher at Organ Mesa Observatory carried out observations on 2009 September 30 over more than seven hours using a 0.35-m Vladimir Benishek f/10 SCT and an unguided SBIG STL-1001E CCD. As a result of Belgrade Astronomical Observatory the collaborative effort, a total of 17 time series sessions was Volgina 7, 11060 Belgrade 38 SERBIA obtained from 2009 August 20 until October 19. All observations were unfiltered with the exception of those recorded on September Frederick Pilcher 18. MPO Canopus software (BDW Publishing, 2009a) employing 4438 Organ Mesa Loop differential aperture photometry, was used by all authors for Las Cruces, NM 88011 USA photometric data reduction. The period analysis was performed using the same program. David Higgins Hunter Hill Observatory The data were merged by adjusting instrumental magnitudes and 7 Mawalan Street, Ngunnawal ACT 2913 overlapping characteristic features of the individual lightcurves. -

On March 16 , 2019 Fifteen Years of the Faulkes Telescope Project
On March 16th, 2019 fifteen years of the Faulkes Telescope Project Our participation in this great adventure Andre Debackere March 2019 We started observations with the Faulkes Telescopes in January 2010. We studied different types of astronomical objects as part of - scientific workshop called “ASAM” at College Le Monteil, Monistrol sur Loire, France - European Comenius project, 6 schools in 5 countries - educational activities, 3 teachers and 2 schools - personal research, hunting binaries, measurements and discoveries 1) Scientific workshop from January 2010 to June 2016 with a dozen college students (12-16 years old) a) Our first subject of study : Trans-Neptunians and dwarf planets, astrometry and animations Learn how to use the Faulkes Telescope interface and the tools as “target visibility” and “exposure time calculator”. To be able to recognize the target in the stellar field by using ALADIN, CDS, Strasbourg, France and ASTROMETRICA, Herbert Raab, Austria. Make animations showing the motion of the asteroid against the starry sky background (with SALSAJ, EUHOU or ASTROMETRICA). How to locate an object in the sky, celestial coordinates (right ascension and declination), their measurements with ASTOMETRICA. The 2m telescopes (FTN & FTS) are powerful instruments so we started by studying the trans- Neptunians, very distant asteroids some of which are candidates for the rank of dwarf planets as for example Varuna and Orcus. (20000) Varuna discovered in 2000 and (90482) Orcus discovered in 2004 are both trans- Neptunian object from -

INPOP08, a 4-D Planetary Ephemeris: from Asteroid and Time-Scale Computations to ESA Mars Express and Venus Express Contributions
Astronomy & Astrophysics manuscript no. inpop08.2.v3c June 10, 2009 (DOI: will be inserted by hand later) INPOP08, a 4-D planetary ephemeris: From asteroid and time-scale computations to ESA Mars Express and Venus Express contributions. A. Fienga1;2, J. Laskar1, T. Morley3, H. Manche1, P. Kuchynka1, C. Le Poncin-Lafitte4, F. Budnik3, M. Gastineau1, and L. Somenzi1;2 1 Astronomie et Syst`emesDynamiques, IMCCE-CNRS UMR8028, 77 Av. Denfert-Rochereau, 75014 Paris, France 2 Observatoire de Besan¸con,CNRS UMR6213, 41bis Av. de l'Observatoire, 25000 Besan¸con,France 3 ESOC, Robert-Bosch-Str. 5, Darmstadt, D-64293 Germany 4 SYRTE, CNRS UMR8630, Observatoire de Paris, 77 Av. Denfert-Rochereau, 75014 Paris, France June 10, 2009 Abstract. The latest version of the planetary ephemerides developed at the Paris Observatory and at the Besan¸conObservatory is presented here. INPOP08 is a 4-dimension ephemeris since it provides to users positions and velocities of planets and the relation between TT and TDB. Investigations leading to improve the modeling of asteroids are described as well as the new sets of observations used for the fit of INPOP08. New observations provided by the European Space Agency (ESA) deduced from the tracking of the Mars Express (MEX) and Venus Express (VEX) missions are presented as well as the normal point deduced from the Cassini mission. We show the huge impact brought by these observations in the fit of INPOP08, especially in terms of Venus, Saturn and Earth-Moon barycenter orbits. Key words. celestial mechanics - ephemerides 1. Introduction ephemeris. The basic idea is to provide to users po- sitions and velocities of Solar System celestial objects, Since the first release, INPOP06, of the plane- and also, time ephemerides relating the Terrestrial time- tary ephemerides developed at Paris and Besan¸con scale, TT, and the time argument of INPOP, the so-called Observatories, (Fienga et al.