Material-Based Design Computation: Tiling Behavior
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

REPLICATING TESSELLATIONS* ANDREW Vincet Abstract
SIAM J. DISC. MATH. () 1993 Society for Industrial and Applied Mathematics Vol. 6, No. 3, pp. 501-521, August 1993 014 REPLICATING TESSELLATIONS* ANDREW VINCEt Abstract. A theory of replicating tessellation of R is developed that simultaneously generalizes radix representation of integers and hexagonal addressing in computer science. The tiling aggregates tesselate Eu- clidean space so that the (m + 1)st aggregate is, in turn, tiled by translates of the ruth aggregate, for each m in exactly the same way. This induces a discrete hierarchical addressing systsem on R'. Necessary and sufficient conditions for the existence of replicating tessellations are given, and an efficient algorithm is provided to de- termine whether or not a replicating tessellation is induced. It is shown that the generalized balanced ternary is replicating in all dimensions. Each replicating tessellation yields an associated self-replicating tiling with the following properties: (1) a single tile T tesselates R periodically and (2) there is a linear map A, such that A(T) is tiled by translates of T. The boundary of T is often a fractal curve. Key words, tiling, self-replicating, radix representation AMS(MOS) subject classifications. 52C22, 52C07, 05B45, 11A63 1. Introduction. The standard set notation X + Y {z + y z E X, y E Y} will be used. For a set T c Rn denote by Tx z + T the translate of T to point z. Throughout this paper, A denotes an n-dimensional lattice in l'. A set T tiles a set R by translation by lattice A if R [-JxsA T and the intersection of the interiors of distinct tiles T and Tu is empty. -

Contractions of Octagonal Tilings with Rhombic Tiles. Frédéric Chavanon, Eric Remila
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Archive Ouverte en Sciences de l'Information et de la Communication Contractions of octagonal tilings with rhombic tiles. Frédéric Chavanon, Eric Remila To cite this version: Frédéric Chavanon, Eric Remila. Contractions of octagonal tilings with rhombic tiles.. [Research Report] LIP RR-2003-44, Laboratoire de l’informatique du parallélisme. 2003, 2+12p. hal-02101891 HAL Id: hal-02101891 https://hal-lara.archives-ouvertes.fr/hal-02101891 Submitted on 17 Apr 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Laboratoire de l’Informatique du Parallelisme´ Ecole´ Normale Sup´erieure de Lyon Unit´e Mixte de Recherche CNRS-INRIA-ENS LYON no 5668 Contractions of octagonal tilings with rhombic tiles Fr´ed´eric Chavanon, Eric R´emila Septembre 2003 Research Report No 2003-44 Ecole´ Normale Superieure´ de Lyon, 46 All´ee d’Italie, 69364 Lyon Cedex 07, France T´el´ephone : +33(0)4.72.72.80.37 Fax : +33(0)4.72.72.80.80 Adresseelectronique ´ : [email protected] Contractions of octagonal tilings with rhombic tiles Fr´ed´eric Chavanon, Eric R´emila Septembre 2003 Abstract We prove that the space of rhombic tilings of a fixed octagon can be given a canonical order structure. -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals. -

Dispersion Relations of Periodic Quantum Graphs Associated with Archimedean Tilings (I)
Dispersion relations of periodic quantum graphs associated with Archimedean tilings (I) Yu-Chen Luo1, Eduardo O. Jatulan1,2, and Chun-Kong Law1 1 Department of Applied Mathematics, National Sun Yat-sen University, Kaohsiung, Taiwan 80424. Email: [email protected] 2 Institute of Mathematical Sciences and Physics, University of the Philippines Los Banos, Philippines 4031. Email: [email protected] January 15, 2019 Abstract There are totally 11 kinds of Archimedean tiling for the plane. Applying the Floquet-Bloch theory, we derive the dispersion relations of the periodic quantum graphs associated with a number of Archimedean tiling, namely the triangular tiling (36), the elongated triangular tiling (33; 42), the trihexagonal tiling (3; 6; 3; 6) and the truncated square tiling (4; 82). The derivation makes use of characteristic functions, with the help of the symbolic software Mathematica. The resulting dispersion relations are surpris- ingly simple and symmetric. They show that in each case the spectrum is composed arXiv:1809.09581v2 [math.SP] 12 Jan 2019 of point spectrum and an absolutely continuous spectrum. We further analyzed on the structure of the absolutely continuous spectra. Our work is motivated by the studies on the periodic quantum graphs associated with hexagonal tiling in [13] and [11]. Keywords: characteristic functions, Floquet-Bloch theory, quantum graphs, uniform tiling, dispersion relation. 1 1 Introduction Recently there have been a lot of studies on quantum graphs, which is essentially the spectral problem of a one-dimensional Schr¨odinger operator acting on the edge of a graph, while the functions have to satisfy some boundary conditions as well as vertex conditions which are usually the continuity and Kirchhoff conditions. -

Wythoffian Skeletal Polyhedra
Wythoffian Skeletal Polyhedra by Abigail Williams B.S. in Mathematics, Bates College M.S. in Mathematics, Northeastern University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Dedication I would like to dedicate this dissertation to my Meme. She has always been my loudest cheerleader and has supported me in all that I have done. Thank you, Meme. ii Abstract of Dissertation Wythoff's construction can be used to generate new polyhedra from the symmetry groups of the regular polyhedra. In this dissertation we examine all polyhedra that can be generated through this construction from the 48 regular polyhedra. We also examine when the construction produces uniform polyhedra and then discuss other methods for finding uniform polyhedra. iii Acknowledgements I would like to start by thanking Professor Schulte for all of the guidance he has provided me over the last few years. He has given me interesting articles to read, provided invaluable commentary on this thesis, had many helpful and insightful discussions with me about my work, and invited me to wonderful conferences. I truly cannot thank him enough for all of his help. I am also very thankful to my committee members for their time and attention. Additionally, I want to thank my family and friends who, for years, have supported me and pretended to care everytime I start talking about math. Finally, I want to thank my husband, Keith. -
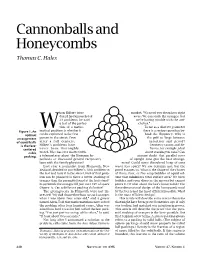
Cannonballs and Honeycombs, Volume 47, Number 4
fea-hales.qxp 2/11/00 11:35 AM Page 440 Cannonballs and Honeycombs Thomas C. Hales hen Hilbert intro- market. “We need you down here right duced his famous list of away. We can stack the oranges, but 23 problems, he said we’re having trouble with the arti- a test of the perfec- chokes.” Wtion of a mathe- To me as a discrete geometer Figure 1. An matical problem is whether it there is a serious question be- optimal can be explained to the first hind the flippancy. Why is arrangement person in the street. Even the gulf so large between of equal balls after a full century, intuition and proof? is the face- Hilbert’s problems have Geometry taunts and de- centered never been thoroughly fies us. For example, what cubic tested. Who has ever chatted with about stacking tin cans? Can packing. a telemarketer about the Riemann hy- anyone doubt that parallel rows pothesis or discussed general reciprocity of upright cans give the best arrange- laws with the family physician? ment? Could some disordered heap of cans Last year a journalist from Plymouth, New waste less space? We say certainly not, but the Zealand, decided to put Hilbert’s 18th problem to proof escapes us. What is the shape of the cluster the test and took it to the street. Part of that prob- of three, four, or five soap bubbles of equal vol- lem can be phrased: Is there a better stacking of ume that minimizes total surface area? We blow oranges than the pyramids found at the fruit stand? bubbles and soon discover the answer but cannot In pyramids the oranges fill just over 74% of space prove it. -

Tiling with Penalties and Isoperimetry with Density
Rose-Hulman Undergraduate Mathematics Journal Volume 13 Issue 1 Article 6 Tiling with Penalties and Isoperimetry with Density Yifei Li Berea College, [email protected] Michael Mara Williams College, [email protected] Isamar Rosa Plata University of Puerto Rico, [email protected] Elena Wikner Williams College, [email protected] Follow this and additional works at: https://scholar.rose-hulman.edu/rhumj Recommended Citation Li, Yifei; Mara, Michael; Plata, Isamar Rosa; and Wikner, Elena (2012) "Tiling with Penalties and Isoperimetry with Density," Rose-Hulman Undergraduate Mathematics Journal: Vol. 13 : Iss. 1 , Article 6. Available at: https://scholar.rose-hulman.edu/rhumj/vol13/iss1/6 Rose- Hulman Undergraduate Mathematics Journal Tiling with Penalties and Isoperimetry with Density Yifei Lia Michael Marab Isamar Rosa Platac Elena Wiknerd Volume 13, No. 1, Spring 2012 aDepartment of Mathematics and Computer Science, Berea College, Berea, KY 40404 [email protected] bDepartment of Mathematics and Statistics, Williams College, Williamstown, MA 01267 [email protected] cDepartment of Mathematical Sciences, University of Puerto Rico at Sponsored by Mayagez, Mayagez, PR 00680 [email protected] dDepartment of Mathematics and Statistics, Williams College, Rose-Hulman Institute of Technology Williamstown, MA 01267 [email protected] Department of Mathematics Terre Haute, IN 47803 Email: [email protected] http://www.rose-hulman.edu/mathjournal Rose-Hulman Undergraduate Mathematics Journal Volume 13, No. 1, Spring 2012 Tiling with Penalties and Isoperimetry with Density Yifei Li Michael Mara Isamar Rosa Plata Elena Wikner Abstract. We prove optimality of tilings of the flat torus by regular hexagons, squares, and equilateral triangles when minimizing weighted combinations of perime- ter and number of vertices. -

Hexagon Tilings of the Plane That Are Not Edge-To-Edge
University of Texas Rio Grande Valley ScholarWorks @ UTRGV Mathematical and Statistical Sciences Faculty Publications and Presentations College of Sciences 6-2021 Hexagon tilings of the plane that are not edge-to-edge Dirk Frettlöh Alexey Glazyrin The University of Texas Rio Grande Valley Z. Lángi Follow this and additional works at: https://scholarworks.utrgv.edu/mss_fac Part of the Mathematics Commons Recommended Citation Frettlöh, D., Glazyrin, A. & Lángi, Z. Hexagon tilings of the plane that are not edge-to-edge. Acta Math. Hungar. 164, 341–349 (2021). https://doi.org/10.1007/s10474-021-01155-5 This Article is brought to you for free and open access by the College of Sciences at ScholarWorks @ UTRGV. It has been accepted for inclusion in Mathematical and Statistical Sciences Faculty Publications and Presentations by an authorized administrator of ScholarWorks @ UTRGV. For more information, please contact [email protected], [email protected]. HEXAGON TILINGS OF THE PLANE THAT ARE NOT EDGE-TO-EDGE DIRK FRETTLOH,¨ ALEXEY GLAZYRIN, AND ZSOLT LANGI´ Abstract. An irregular vertex in a tiling by polygons is a vertex of one tile and belongs to the interior of an edge of another tile. In this paper we show that for any integer k ≥ 3, there exists a normal tiling of the Euclidean plane by convex hexagons of unit area with exactly k irregular vertices. Using the same approach we show that there are normal edge-to-edge tilings of the plane by hexagons of unit area and exactly k many n-gons (n > 6) of unit area. A result of Akopyan yields an upper bound for k depending on the maximal diameter and minimum area of the tiles. -

Hexagonal Global Parameterization of Arbitrary Surfaces Matthias Nieser, Jonathan Palacios, Konrad Polthier, and Eugene Zhang
IEEE TVCG, VOL. ?,NO. ?, AUGUST 200? 1 Hexagonal Global Parameterization of Arbitrary Surfaces Matthias Nieser, Jonathan Palacios, Konrad Polthier, and Eugene Zhang ✦ Abstract—We introduce hexagonal global parameterizations, a new patterns in nature, such as honeycombs, insect eyes, fish type of surface parameterizations in which parameter lines respect eggs, and snow and water crystals, as well as in man-made six-fold rotational symmetries (6-RoSy). Such parameterizations en- objects such as floor tiling, carpet patterns, and architectural able the tiling of surfaces with nearly regular hexagonal or triangular decorations (Figure 1). patterns, and can be used for triangular remeshing. To construct a hexagonal parameterization on a surface, we provide Tiling a surface with regular texture and geometry patterns an automatic algorithm to generate a 6-RoSy field that respects is an important yet challenging problem in pattern synthe- directional and singularity features of the surface. This field is then sis [2], [1]. Methods based on some local parameterization used to direct a hexagonal global parameterization. The framework, of the surface often lead to visible breakup of the patterns called HEXCOVER, extends the QUADCOVER algorithm and formu- along seams, i.e., where the surface is cut open during lates necessary conditions for hexagonal parameterization. parameterization. Global parameterizations can alleviate We demonstrate the usefulness of our geometry-aware global pa- this problem when the translational and rotational discon- rameterization with applications such as surface tiling with nearly tinuity in the parameterization is compatible with the tiling regular textures and geometry patterns, as well as triangular and pattern in the input texture and geometry. -

Recursive Tilings and Space-Filling Curves with Little Fragmentation
Recursive tilings and space-filling curves with little fragmentation Herman Haverkort∗ October 24, 2018 Abstract This paper defines the Arrwwid number of a recursive tiling (or space-filling curve) as the smallest number a such that any ball Q can be covered by a tiles (or curve sections) with total volume O(volume(Q)). Recursive tilings and space-filling curves with low Arrwwid numbers can be applied to optimise disk, memory or server access patterns when processing sets of points in Rd. This paper presents recursive tilings and space-filling curves with optimal Arrwwid numbers. For d 3, we see that regular cube tilings and space-filling curves cannot have optimal Arrwwid≥ number, and we see how to construct alternatives with better Arrwwid numbers. 1 Introduction 1.1 The problem Consider a set of data points in a bounded region U of R2, stored on disk. A standard operation on such point sets is to retrieve all points that lie inside a certain query range, for example a circle or a square. To prevent large delays because of disk head movements while answering such queries, it is desirable that the points are stored on disk in a clustered way [2, 9, 10, 11, 15]. Similar considerations arise when storing spatial data in certain types of distributed networks [19] or when scanning spatial objects to render them as a raster image; in the latter case it is desirable that the pixels that cover any particular object are scanned in a clustered way, so that the object does not have to be brought into cache too often [21]. -

Wallpaper Patterns and Buckyballs Transcript
Wallpaper Patterns and Buckyballs Transcript Date: Wednesday, 18 January 2006 - 12:00AM Location: Barnard's Inn Hall WALLPAPER PATTERNS AND BUCKYBALLS Professor Robin Wilson My lectures this term will be in the area of combinatorics – the subject of counting, arranging and sorting mathematical objects. Next month I’ll tell you about trees and graph theory and about the theory of designs, but today we’re doing something more geometrical – and there’ll be lots of pretty pictures to look at. Although my title is Wallpaper patterns and buckyballs, I won’t actually say very much about either of these – rather, I’ll use them as vehicles for introducing the subjects of tilings (often called tessellations) andpolyhedra. By the time you leave here today, you’ll have lots of ideas for tiling your bathroom floor and for making some attractive decorations to hang on the tree next Christmas. Tilings How can we define a tiling of the plane? We probably want the tiles to form a regular pattern – one that can be extended as far as we wish. But then we need to make some decisions. Do we want to allow our tiles to have curved sides, or must all the sides be straight – as in a square or a hexagon? If so, should the polygons all be regular, and should they all be the same? Must the pattern repeat periodically however far out we go? For the purpose of making progress, we’ll require that each tile is a convex polygon, but we won’t always require them all to be the same. -
On Periodic Tilings with Regular Polygons
José Ezequiel Soto Sánchez On Periodic Tilings with Regular Polygons AUGUST 11, 2020 phd thesis, impa - visgraf lab advisor: Luiz Henrique de Figueiredo co-advisor: Asla Medeiros e Sá chequesoto.info Con amor y gratitud a... Antonio Soto ∤ Paty Sánchez Alma y Marco Abstract On Periodic Tilings with Regular Polygons by José Ezequiel Soto Sánchez Periodic tilings of regular polygons have been present in history for a very long time: squares and triangles tessellate the plane in a known simple way, tiles and mosaics surround us, hexagons appear in honeycombs and graphene structures. The oldest registry of a systematic study of tilings of the plane with regular polygons is Kepler’s book Harmonices Mundi, published 400 years ago. In this thesis, we describe a simple integer-based representation for periodic tilings of regular polygons using complex numbers. This representation allowed us to acquire geometrical models from two large collections of images – which constituted the state of the art in the subject –, to synthesize new images of the tilings at any scale with arbitrary precision, and to recognize symmetries and classify each tiling in its wallpaper group as well as in its n-uniform k-Archimedean class. In this work, we solve the age old problem of characterizing all triangle and square tilings (Sommerville, 1905), and we set the foundations for the enumeration of all periodic tilings with regular polygons. An algebraic structure for families of triangle-square tilings arises from their representation via equivalence with edge-labeled hexagonal graphs. The set of tilings whose edge-labeled hexagonal dual graph is embedded in the same flat torus is closed by positive- integer linear combinations.