Collaborative and Inclusive Process with the Autism Community: a Case Study in Colombia About Social Robot Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Model Reveals New Links Between Autism and Fragile X
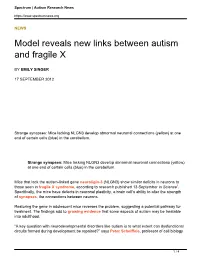
Spectrum | Autism Research News https://www.spectrumnews.org NEWS Model reveals new links between autism and fragile X BY EMILY SINGER 17 SEPTEMBER 2012 Strange synapses: Mice lacking NLGN3 develop abnormal neuronal connections (yellow) at one end of certain cells (blue) in the cerebellum. Strange synapses: Mice lacking NLGN3 develop abnormal neuronal connections (yellow) at one end of certain cells (blue) in the cerebellum. Mice that lack the autism-linked gene neuroligin-3 (NLGN3) show similar deficits in neurons to those seen in fragile X syndrome, according to research published 13 September in Science1. Specifically, the mice have defects in neuronal plasticity, a brain cell’s ability to alter the strength of synapses, the connections between neurons. Restoring the gene in adolescent mice reverses the problem, suggesting a potential pathway for treatment. The findings add to growing evidence that some aspects of autism may be treatable into adulthood. “A key question with neurodevelopmental disorders like autism is to what extent can dysfunctional circuits formed during development be repaired?” says Peter Scheiffele, professor of cell biology 1 / 4 Spectrum | Autism Research News https://www.spectrumnews.org and biological development at the University of Basel in Switzerland, and the study’s lead investigator. “We see that a substantial amount of inappropriate synapses can be rescued in the adult.” The research also supports the idea that studying so-called syndromic forms of autism, such as fragile X, which are further along in drug development than are more common forms of autism, will shed light on the molecular underpinnings of the disorder. “I was quite excited about this paper because it links what may be very different genetic causes of autism to perhaps similar mechanistic and therapeutic targets,” says Kimberly Huber, associate professor of neuroscience at the University of Texas Southwestern Medical Center in Dallas. -

100 Day Kit for Newly Diagnosed Families of School Age Children
100 Day Kit for Newly Diagnosed Families of School Age Children FAMILY SERVICES DECEMBER 2014 100 DAY KIT FOR SCHOOL AGE CHILDREN The Autism Speaks 100 Day Kit is a tool designed to help assist families of children recently diagnosed with autism during the critical period following an autism diagnosis. The 100 Day Kit for School Age Children was released in 2014 and adapted from the 2010 Asperger Syndrome/High-Functioning Autism Tool Kit after the DSM-5 was published. The kits were created by the Autism Speaks Family Services staff in conjunction with both an advisory committee and the Family Services Committee. Autism Speaks would like to extend special thanks to the Advisory Committee for the time and effort that they put into reviewing this kit: 100 Day Kit for School Age Children Mel Karmazin* Advisory Committee Grandparent Ann Brendel Brian Kelly * ** Parent Geraldine Dawson, Ph.D. Professor, Department of Psychiatry and Artie Kempner* Behavioral Sciences Parent Duke University Medical Center Gary S. Mayerson* Lauren Elder, Ph.D. Founding Attorney, Mayerson & Associates Director, Ascent Psychological Services Kevin Murray* Peter F. Gerhardt, Ed.D. Parent Former President, Organization for Autism Research (OAR) Linda Meyer, Ed.D. Kerry Magro, M.A. Executive Director, Autism New Jersey Autism Speaks Social Media Coordinator, Danny Openden, Ph.D., B.C.B.A.-D. Self-advocate President and CEO, Southwest Autism Research and Valerie Paradiz, Ph.D. Resource Center (SARRC) Director, Valerie Paradiz, LLC Valerie Paradiz, Ph.D. Director Autistic Global Initiative Director, Valerie Paradiz, LLC Parent and self-advocate Director Autistic Global Initiative Patricia R. -

Materials to Help Convince Your Self-Funded Company to Provide an Insurance Benefit for Autism
Materials to Help Convince Your Self-funded Company to Provide an Insurance Benefit for Autism Lorri Unumb, Esq. Autism Speaks [email protected] Table of Contents Letter from Lorri . Presentation Slides . Sample Letters to the Company . List of Companies that offer an Autism Benefit . Examples of policy language . Letter from Lorri explaining the issue Sincerely yours, Lorri Shealy Unumb, J.D. Senior Policy Advisor & Counsel Autism Speaks Autism Coverage Benefits The Self-funded Company Lorri Unumb, Esq. Autism Speaks [email protected] What is Autism? • Autism is a medical condition, brought on through no fault of the family. • Autism affects a person’s communication abilities and social skills, and often causes repetitive patterns of behavior. • Autism is diagnosed by a medical doctor (usually a developmental pediatrician). • Treatment is prescribed by a medical doctor. “Autism” • The term “autism” is often used imprecisely: – some people use it interchangeably with “autism spectrum disorder” – others use it to mean one of the autism spectrum disorders. • In fact, there are 3 distinct diagnoses within the family of autism spectrum disorders. (See chart on next slide.) • Across the spectrum, people vary greatly in terms of type and severity of deficits. Pervasive There are 5 Pervasive Developmental Developmental Disorders (PDDs). Disorders Within the 5 PDDs, there are 3 Autism (the umbrella category Spectrum Disorders in the DSM-IV) (ASDs), shown in purple below. Autistic Asperge Pervasive r’s Disorder Developmental Syndro (classic me Disorder – Not autism) Otherwise Specified a/k/a “autism” (PDD-NOS) Less than Approx. ½ of all ASDs 1/3 of all 1/6 ASDs of all ASDs Rett’s Syndrome Curable? Treatable? • Although there is no known cure for autism, it can be treated so that the symptoms are not disabling. -
Self-Funded Employer Tool Kit
Self-Funded Employer Tool Kit A tool kit to help families approach their self-funded “ERISA” employers about adding autism benefits to the company health plan February 2014 Dear Families: Thank you for requesting this information packet from Autism Speaks. It is our hope that these materials will help you convince your self-funded employer to offer meaningful autism benefits. The American population receives its health care coverage from a variety of sources. Some people have private health insurance arranged and paid for (perhaps partially) by their employers. Others purchase health insurance on their own in the individual market. As of January 2014, some Americans purchase insurance through “marketplaces” under the Affordable Care Act. Still others are insured through public insurance programs such as Medicaid or Medicare. Of the Americans whose insurance is provided through their employers, more than half are covered by health benefit plans that are not subject to state regulation. The largest body of non-state-regulated plans are self-insured or self-funded plans, which are plans provided by large employers who choose to pay claims from their own money rather than purchase a typical insurance policy for their employees. Many consumers do not know whether their employer-provided plan is a traditional insurance plan or a self-funded plan, largely because most insurance cards carried by consumers look essentially the same regardless of whether the coverage is traditional insurance or a self- funded plan. The cards look the same because most self-funded plans are administered by a company called a “third-party administrator,” and the third-party administrator is usually a health insurance company, such as Cigna or Aetna. -

Autism Speaks Does Not Provide Medical Or Legal Advice Or Services
100 Day Kit A tool kit to assist families in getting the critical information they need in the first 100 days after an autism diagnosis. Autism Speaks does not provide medical or legal advice or services. Rather, Autism Speaks provides general information about autism as a service to the community. The information provided in this kit is not a recommendation, referral or endorsement of any resource, therapeutic method, or service provider and does not replace the advice of medical, legal or educational professionals. This kit is not intended as a tool for verifying the credentials, qualifications, or abilities of any organization, product or professional. Autism Speaks has not validated and is not responsible for any information or services provided by third parties. You are urged to use independent judgment and request references when considering any resource associated with the provision of services related to autism ©2013 Autism Speaks Inc. Autism Speaks and Autism Speaks It’s Time To Listen & Design are trademarks owned by Autism Speaks Inc. All rights reserved. About this Kit Autism Speaks would like to extend special thanks to the Parent Advisory Committee for the time and effort that they put into reviewing the 100 Day Kit. 100 Day Kit Parent Advisory Committee Stacy Crowe Rodney Goodman Beth Hawes Deborah Hilibrand Dawn Itzkowitz Stacy Karger Marjorie Madfis Donna Ross- Jones Judith Ursitti Marcy Wenning Family Services Committee Members Dan Aronson Parent Liz Bell Parent Sallie Bernard Parent, Executive Director, SafeMinds Farah Chapes Chief Administrative Officer, The Marcus Autism Center Peter F. Gerhardt, Ed.D Director, Upper School, The McCarton School Founding Chair of the Scientific Council, Organization for Autism Research Lorrie Henderson Ph.D., LCSW, MBA Brian Kelly * ** Parent ©2013 Autism Speaks Inc. -

Brief Note on Autism Therapies and Treatment Andrew Cooper * Behavioural Issues That Are Common in People with Autism
OPEN ACCESS Freely available online Autism–Open Access Perspective 2021 Brief Note on Autism Therapies and Treatment Andrew Cooper * behavioural issues that are common in people with autism. Some programmes emphasise the reduction of problem habits Child Psychiatrist, Oxford University, University Section and the acquisition of new skills. Some services teach children of Child and Adolescent Psychiatry, Park Hospital for how to behave in social environments or how to interact more Children, Old Road, Headington, Oxford OX3 7LQ, UK effectively with others. Applied behaviour analysis (ABA) may assist children in learning new skills and transferring them to INTRODUCTION other situations. The term Autism Spectrum Disorder (ASD) refers to a Educational therapies continuum of neuro developmental disorders. Communication and social contact issues are common in these disorders. Highly structured training services also work well for children Limited, repeated, and stereotyped interests or patterns of with autism spectrum disorder. A team of experts and a number behaviour are common in people with ASD. Symptoms of of activities to develop social skills, communication, and autism usually appear between the ages of 12 and 24 months in attitudes are usually used in successful initiatives. Preschoolers early childhood. Symptoms, on the other hand, can occur who undergo comprehensive, individualised behavioural sooner or later. A significant delay in language or social growth therapies also make significant gains. can be one of the first signs. Family therapies Causes of Autism Parents and other family members should learn to play and Finding a close relative who suffers from autism, communicate with their children in ways that foster social fragile X syndrome, or other genetic conditions interaction skills, handle problem behaviours, and teach Being the child of older parents everyday life skills and communication to their children. -
A Comprehensive Book on Autism Spectrum Disorders
A COMPREHENSIVE BOOK ON AUTISM SPECTRUM DISORDERS Edited by Mohammad-Reza Mohammadi A Comprehensive Book on Autism Spectrum Disorders Edited by Mohammad-Reza Mohammadi Published by InTech Janeza Trdine 9, 51000 Rijeka, Croatia Copyright © 2011 InTech All chapters are Open Access articles distributed under the Creative Commons Non Commercial Share Alike Attribution 3.0 license, which permits to copy, distribute, transmit, and adapt the work in any medium, so long as the original work is properly cited. After this work has been published by InTech, authors have the right to republish it, in whole or part, in any publication of which they are the author, and to make other personal use of the work. Any republication, referencing or personal use of the work must explicitly identify the original source. Statements and opinions expressed in the chapters are these of the individual contributors and not necessarily those of the editors or publisher. No responsibility is accepted for the accuracy of information contained in the published articles. The publisher assumes no responsibility for any damage or injury to persons or property arising out of the use of any materials, instructions, methods or ideas contained in the book. Publishing Process Manager Marina Jozipovic Technical Editor Teodora Smiljanic Cover Designer Jan Hyrat Image Copyright EDHAR, 2011. Used under license from Shutterstock.com First published September, 2011 Printed in Croatia A free online edition of this book is available at www.intechopen.com Additional hard copies can be obtained from [email protected] A Comprehensive Book on Autism Spectrum Disorders, Edited by Mohammad-Reza Mohammadi p. -

100 Day Kit for Newly Diagnosed Families of Young Children
100 Day Kit For Newly Diagnosed Families of Young Children FAMILY SERVICES JULY 2014 100 DAY KIT A tool kit to assist families of young children in getting the critical information they need in the first 100 days after an autism diagnosis. Autism Speaks does not provide medical or legal advice or services. Rather, Autism Speaks provides general information about autism as a service to the community. The information provided in this tool kit is not a recommendation, referral or endorsement of any resource, therapeutic method, or service provider and does not replace the advice of medical, legal or educational professionals. Autism Speaks has not validated and is not responsible for any information or services provided by third parties. You are urged to use independent judgment and request references when considering any resource associated with the provision of services related to autism. © 2018 Autism Speaks Inc. Autism Speaks and Autism Speaks Design are registered trademarks owned by Autism Speaks Inc. All rights reserved. The use of unaffiliated representatives for endorsement, advertising, promotional and sales material is prohibited by law. 100 DAY KIT A out This Kit 1 0 0 ay Kit rofessional A v isory ommittee The Autism Speaks 0 0 Day Kit is a tool designed G eral ine awson h. to help assist families of children recently diagnosed Professor, Department of Psychiatry and Behavioral Sci- with autism during the critical period following an ences, Duke niversity Medical Center autism diagnosis. The kit includes basic information about autism and its symptoms, tips for dealing with Ro in . ansen . a child s diagnosis, information about therapies and Director, niversity Center for Excellence in Develop- treatments, forms to help parents get organized, a mental Disabilities comprehensive list of resources and more. -

Celebrating Children with Autism Spectrum Disorder: Practical Resources During a Pandemic
Date: April 23, 2020 To: Chief School Administrators, Charter School and Renaissance School Project Leads, Administrators of Approved Private Schools for Students with Disabilities Route To: Directors of Special Services From: Peggy McDonald, Ed.D., Assistant Commissioner Division of Student Services Kim Buxenbaum Psy.D., Director Office of Special Education Celebrating Children with Autism Spectrum Disorder: Practical Resources During a Pandemic Every April, schools throughout New Jersey participate in schoolwide and community activities to commemorate Autism Awareness Month. Although the COVID-19 global pandemic has resulted in the closure of school buildings, the New Jersey Department of Education (NJDOE), in collaboration with school districts and our partner agencies, would like to take this time to highlight the many resources available to support teachers and families during this period of social distancing and remote learning. This list of resources was developed in order to offer guidance to parents, families and professionals on how to provide support to individuals with Autism Spectrum Disorder (ASD) in New Jersey during this pandemic. This guidance is an overview of national, state, and local resources and is designed to provide real-time resources for individuals with ASD. For additional resources on educating students with disabilities, including Autism Spectrum Disorder, please visit the NJDOE Office of Special Education resources page. Educator Resources • The Autism Helper - How You Can Raise Awareness in Your School -
Introduction I
Introduction i The Complete Guide to Autism Treatments: Make Sure Your Child Gets What Works! Copyright © 2011 by SKF Books, Inc. All rights reserved. No part of this book may be reproduced in any form or by Any means without the prior written permission of the publisher. Any errors and omissions are the responsibility of the author. Library of Congress Control Number: 2010919311 Freeman, Sabrina Karen, 1958 – The complete guide to autism treatments. A parent’s handbook: Make sure your child gets what works! / Sabrina Freeman Includes bibliographical references and index. ISBN 978-0-9657565-7-0 1. Autism in children—Treatment. 2. Autism—Treatment. I. Title RJ506.A9F725 2011 618.92’85882’06 C2011-900064-9 Published by: SKF Books, Inc. 1050 Larrabee Avenue #104-357 Bellingham, WA 98225 Printed in the U.S.A. Second Edition Disclaimer: The cover photo is being used for illustrative purposes only and any person depicted in that photo is a model. ii Introduction Contents Foreword .....................................................................................ix Introduction .............................................................................. xix Section One: What Works and What Doesn’t? ............1 Cost of Autism Treatment .....................................................................3 Half-baked Research ............................................................................4 1.1 Behavioral Therapies ............................................................................5 What is Behaviorism as it Applies -

Autism Treatments Used by Parents in Abu Dhabi, United Arab Emirates
Open Access Austin Journal of Autism & Related Disabilities Research Article Autism Treatments used by Parents in Abu Dhabi, United Arab Emirates Kelly MP*, Tennant L and Al-Hassan S Emirates College for Advanced Education, United Arab Abstract Emirates Although autism is on the rise, there is a paucity in the literature examining *Corresponding author: Michelle P Kelly, Counseling, the treatment of autism in the United Arab Emirates in the Middle East. This Health and Special Education Division, Emirates College research analyzed treatment choices for children with autism by parents living for Advanced Education, P.O. Box 126662, Abu Dhabi, in Abu Dhabi. Respondents (n=119) completed a bilingual survey listing 128 United Arab Emirates different autism treatments and indicated if they had never used, used in the past, or were currently using each treatment. The most commonly used Received: May 31, 2016; Accepted: June 26, 2016; treatment was speech and language therapy, following by technology-based Published: June 27, 2016 treatment and applied behavior analysis. On average, respondents were currently using 7.06 treatments, with one parent reporting the current use of 28. The implications of these findings for future research in the Middle East were discussed. Keywords: Autism; Treatment; Evidence-based; Intervention; Parents; United Arab Emirates Introduction Ain region, and 0.3 million in the Western region). The UAE national population made up 20.19% of the total population. In 2012, the Autism is a developmental disability that is manifested during prevalence rate for autism was estimated to be 1 in 80 Emirati males the first three years of a child’s life and persists throughout the and 1 in 240 Emirati females, in the Emirate of Abu Dhabi including lifespan [1]. -

American Psychological Association 5Th Edition
Running head: ACHIEVEMENT PROFILES AND GROWTH TRAJECTORIES 1 Reading and math achievement profiles and longitudinal growth trajectories of children with an Autism Spectrum Disorder Xin Wei, Elizabeth R.A. Christiano, Jennifer W. Yu, Mary Wagner, and Donna Spiker SRI International, 333 Ravenswood Ave., Menlo Park, CA 94025, U.S. A. Citation: Wei, X., Christiano, E., Yu, J., Wagner, M., & Spiker, D. (2015). Reading and math achievement profiles and longitudinal growth trajectories of children with an autism spectrum disorder. Autism, 19(2), 200-210. doi: 10.1177/1362361313516549 Corresponding author: Xin Wei, SRI International, 333 Ravenswood Avenue, BS169, Menlo Park, CA 94025-3493. E-mail: [email protected]. Phone: (650) 859-5318. Fax: (650)859-3092. Acknowledgement: This research was supported by Grant R324A120012 from the U.S. Department of Education, Institute of Education Sciences and Grant HRD -1130088 from the National Science Foundation. However, any opinions expressed are those of the authors and do not represent the positions or polices of the funding agency. ACHIEVEMENT PROFILES AND GROWTH TRAJECTORIES 2 Abstract This study examined the reading and math achievement profiles and longitudinal growth trajectories of a nationally representative sample of children ages 6 through 9 with an ASD. Four distinct achievement profiles were identified: higher-achieving (39%), hyperlexia (9%), hypercalculia (20%), and lower-achieving (32%). Children with hypercalculia and lower- achieving profiles were more likely to be from low socioeconomic families and had lower functional cognitive skills than the higher-achieving profile. All four profiles lost ground in passage comprehension over time. Slower improvement occurred for the higher-achieving group on letter-word identification, the hyperlexia group on conversation abilities, and the hypercalculia group on calculation and functional cognitive skills relative to the lower-achieving group.