Improving Hazard Analysis and Certification of Integrated Modular Avionics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
CAAM 3 Report
3rd Technical Report On Propulsion System and Auxiliary Power Unit (APU) Related Aircraft Safety Hazards A joint effort of The Federal Aviation Administration and The Aerospace Industries Association March 30, 2017 Questions concerning distribution of this report should be addressed to: Federal Aviation Administration Manager, Engine and Propeller Directorate. TABLE OF CONTENTS Page Table of Contents iii List of Figures v I. Foreword 1 II. Background 1 III. Scope 2 IV. Discussion 3 V. Relationship to Previous CAAM Data 7 VI. General Notes and Comments 8 VII. Fleet Utilization 11 VIII. CAAM3 Team Members 12 IX. Appendices List of Appendices 13 Appendix 1: Standardized Aircraft Event Hazard Levels and Definitions 14 • General Notes Applicable to All Event Hazard Levels 19 • Rationale for Changes in Severity Classifications 19 • Table 1. Historical Comparison of Severity Level Descriptions and Rationale for CAAM3 Changes 21 Appendix 2: Event Definitions 39 Appendix 3: Propulsion System and Auxiliary Power Unit (APU) Related Aircraft Safety Hazards (2001 through 2012) 44 • Uncontained Blade 44 • Uncontained Disk 50 • Uncontained – Other 56 iii • Uncontained – All Parts 62 • High Bypass Comparison by Generation 63 • Relationship Among High Bypass Fleet 64 • Case Rupture 66 • Case Burnthrough 69 • Under-Cowl Fire 72 • Strut/Pylon Fire 76 • Fuel Leak 78 • Engine Separation 82 • Cowl Separation 85 • Propulsion System Malfunction Recognition and Response (PSMRR) 88 • Crew Error 92 • Reverser/Beta Malfunction – In-Flight Deploy 96 • Fuel Tank Rupture/Explosion 99 • Tailpipe Fire 102 • Multiple-Engine Powerloss – Non-Fuel 107 • Multiple-Engine Powerloss – Fuel-Related 115 • Fatal Human Ingestion / Propeller Contact 120 • IFSD Snapshot by Hazard Level – 2012 Data Only 122 • RTO Snapshot by Hazard Level – 2012 Data Only 123 • APU Events 123 • Turboprop Events 124 • Matrices of Event Counts, Hazard Ratios and Rates 127 • Data Comparison to Previous CAAM Data 135 [ The following datasets which were collected in CAAM2 were not collected in CAAM3. -

A Design Study Me T Rop"Ol Itan Air Transit System
NASA CR 73362 A DESIGN STUDY OF A MET R OP"OL ITAN AIR TRANSIT SYSTEM MAT ir 0 ± 0 49 PREPARED UNDER, NASA-ASEE SUMMER FACULTY FELLOWSHIP PROGRAM ,IN Cq ENGINEERING SYSTEMS DESIGN NASA CONTRACT NSR 05-020-151 p STANFORD UNIVERSITY STANFORD CALIFORNIA CL ceoroducedEAR'C-by thEGHOU AUGUST 1969 for Federal Scientific &Va Tec1nical 2 Information Springfied NASA CR 73362 A DESIGN STUDY OF A METROPOLITAN AIR TRANSIT SYSTEM MAT Prepared under NASA Contract NSR 05-020-151 under the NASA-ASEE Summer Faculty Fellowship Program in Engineering Systems Design, 16 June 29 August, 1969. Faculty Fellows Richard X. Andres ........... ......... ..Parks College Roger R. Bate ....... ...... .."... Air Force Academy Clarence A. Bell ....... ......"Kansas State University Paul D. Cribbins .. .... "North Carolina State University William J. Crochetiere .... .. ........ .Tufts University Charles P. Davis . ... California State Polytechnic College J. Gordon Davis . .... Georgia Institute of Technology Curtis W. Dodd ..... ....... .Southern Illinois University Floyd W. Harris .... ....... .... Kansas State University George G. Hespelt ........ ......... .University of Idaho Ronald P. Jetton ...... ............ .Bradley University Kenneth L. Johnson... .. Milwaukee School of Engineering Marshall H. Kaplan ..... .... Pennsylvania State University Roger A. Keech . .... California State Polytechnic College Richard D. Klafter... .. .. Drexel Institute of Technology Richard S. Marleau ....... ..... .University of Wisconsin Robert W. McLaren ..... ....... University'of Missouri James C. Wambold..... .. Pefinsylvania State University Robert E. Wilson..... ..... Oregon State University •Co-Directors Willi'am Bollay ...... .......... Stanford University John V. Foster ...... ........... .Ames Research Center Program Advisors Alfred E. Andreoli . California State Polytechnic College Dean F. Babcock .... ........ Stanford Research Institute SUDAAR NO. 387 September, 1969 i NOT FILMED. ppECEDING PAGE BLANK CONTENTS Page CHAPTER 1--INTRODUCTION ... -
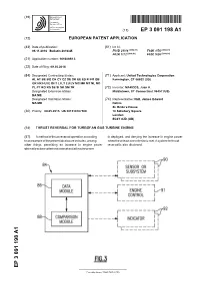
Thrust Reversal for Turbofan Gas Turbine Engine
(19) TZZ¥Z___T (11) EP 3 091 198 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 09.11.2016 Bulletin 2016/45 F01D 21/14 (2006.01) F02K 1/76 (2006.01) F02K 1/72 (2006.01) F02C 9/26 (2006.01) (21) Application number: 16168699.3 (22) Date of filing: 09.05.2016 (84) Designated Contracting States: (71) Applicant: United Technologies Corporation AL AT BE BG CH CY CZ DE DK EE ES FI FR GB Farmington, CT 06032 (US) GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR (72) Inventor: MARCOS, Juan A. Designated Extension States: Middletown, CT Connecticut 06457 (US) BA ME Designated Validation States: (74) Representative: Hull, James Edward MA MD Dehns St. Bride’s House (30) Priority: 08.05.2015 US 201514707500 10 Salisbury Square London EC4Y 8JD (GB) (54) THRUST REVERSAL FOR TURBOFAN GAS TURBINE ENGINE (57) A method of thrust reversal operation according is deployed, and denying the increase in engine power to an example of the present disclosure includes, among when the at least one criterion is met. A system for thrust other things, permitting an increase in engine power reversal is also disclosed. when at least one criterion is not met and a thrust reverser EP 3 091 198 A1 Printed by Jouve, 75001 PARIS (FR) 1 EP 3 091 198 A1 2 Description of a predefined limit when the at least one predetermined criterion is met. BACKGROUND [0010] A gas turbine engine according to an example of the present disclosure includes a fan section including [0001] The present disclosure relates to a thrust re- 5 a fan nacelle arranged at least partially about a fan, an verser, and more particular to thrust reversal operation. -

Electrical Generation for More-Electric Aircraft Using Solid Oxide Fuel Cells
PNNL-XXXXX Prepared for the U.S. Department of Energy under Contract DE-AC05-76RL01830 Electrical Generation for More-Electric Aircraft using Solid Oxide Fuel Cells GA Whyatt LA Chick April 2012 PNNL-XXXXX Electrical Generation for More- Electric Aircraft using Solid Oxide Fuel Cells GA Whyatt LA Chick April 2012 Prepared for the U.S. Department of Energy under Contract DE-AC05-76RL01830 Pacific Northwest National Laboratory Richland, Washington 99352 Summary This report examines the potential for Solid-Oxide Fuel Cells (SOFC) to provide electrical generation on-board commercial aircraft. Unlike a turbine-based auxiliary power unit (APU) a solid oxide fuel cell power unit (SOFCPU) would be more efficient than using the main engine generators to generate electricity and would operate continuously during flight. The focus of this study is on more-electric aircraft which minimize bleed air extraction from the engines and instead use electrical power obtained from generators driven by the main engines to satisfy all major loads. The increased electrical generation increases the potential fuel savings obtainable through more efficient electrical generation using a SOFCPU. However, the weight added to the aircraft by the SOFCPU impacts the main engine fuel consumption which reduces the potential fuel savings. To investigate these relationships the Boeing 787-8 was used as a case study. The potential performance of the SOFCPU was determined by coupling flowsheet modeling using ChemCAD software with a stack performance algorithm. For a given stack operating condition (cell voltage, anode utilization, stack pressure, target cell exit temperature), ChemCAD software was used to determine the cathode air rate to provide stack thermal balance, the heat exchanger duties, the gross power output for a given fuel rate, the parasitic power for the anode recycle blower and net power obtained from (or required by) the compressor/expander. -

Department of Transportation
Vol. 81 Friday, No. 98 May 20, 2016 Part II Department of Transportation Federal Aviation Administration 14 CFR Part 60 Flight Simulation Training Device Qualification Standards for Extended Envelope and Adverse Weather Event Training Tasks (Correction); Final Rule VerDate Sep<11>2014 18:26 May 19, 2016 Jkt 238001 PO 00000 Frm 00001 Fmt 4717 Sfmt 4717 E:\FR\FM\20MYR2.SGM 20MYR2 mstockstill on DSK3G9T082PROD with RULES2 32016 Federal Register / Vol. 81, No. 98 / Friday, May 20, 2016 / Rules and Regulations DEPARTMENT OF TRANSPORTATION March 30, 2016, make the following corrections: Federal Aviation Administration ■ 1. Correct the table appearing on page 14 CFR Part 60 18240 to read as follows: [Docket No.: FAA–2014–0391; Amdt. No. 60—4] RIN 2120–AK08 Flight Simulation Training Device Qualification Standards for Extended Envelope and Adverse Weather Event Training Tasks Correction 14 CFR PART 60 [CORRECTED] In FR Rule Doc. No. 2016–05860 beginning on page 18178 in the issue of TABLE A1B—TABLE OF TASKS VS. SIMULATOR LEVEL QPS Requirements Information Subjective requirements Simulator Entry No. In order to be qualified at the simulator qualification level indi- levels cated, the simulator must be able to perform at least the Notes tasks associated with that level of qualification A B C D ******* 3. Inflight Maneuvers. ******* 3.b. High Angle of Attack Maneuvers 3.b.1 .......................... Approaches to Stall ................................................................... X X X X 3.b.2 .......................... Full Stall .................................................................................... X X Stall maneuvers at angles of attack above the activation of the stall warn- ing system. Required only for FSTDs qualified to conduct full stall training tasks as indi- cated on the Statement of Qualifica- tion. -

Federal Aviation Administration, DOT § 35.19
Federal Aviation Administration, DOT § 35.19 the propeller installation and oper- (2) The following are regarded as ation instructions required under § 35.3. major propeller effects for variable (e) If the safety analysis depends on pitch propellers: one or more of the following items, (i) An inability to feather the pro- those items must be identified in the peller for feathering propellers. analysis and appropriately substan- (ii) An inability to change propeller tiated. pitch when commanded. (1) Maintenance actions being carried (iii) A significant uncommanded out at stated intervals. This includes change in pitch. verifying that items that could fail in (iv) A significant uncontrollable a latent manner are functioning prop- torque or speed fluctuation. erly. When necessary to prevent haz- [Amdt. 35–8, 73 FR 63346, Oct. 24, 2008, as ardous propeller effects, these mainte- amended by Amdt. 35–9, 78 FR 4041, Jan. 18, nance actions and intervals must be 2013; Amdt. 35–9A, 78 FR 45052, July 26, 2013] published in the instructions for con- tinued airworthiness required under § 35.16 Propeller critical parts. § 35.4. Additionally, if errors in mainte- The integrity of each propeller crit- nance of the propeller system could ical part identified by the safety anal- lead to hazardous propeller effects, the ysis required by § 35.15 must be estab- appropriate maintenance procedures lished by: must be included in the relevant pro- (a) A defined engineering process for peller manuals. ensuring the integrity of the propeller (2) Verification of the satisfactory critical part throughout its service life, functioning of safety or other devices (b) A defined manufacturing process at pre-flight or other stated periods. -

Aviation Science (AVS) 1
Aviation Science (AVS) 1 AVS 3013 Instruments (2-2-3) AVIATION SCIENCE (AVS) The instruments covered by this course are treated in general terms. This course deals with aircraft attitude and flight path instruments, AVS 1013 Aviation Electric and Magnetic Fundamentals (3-1-3) aircraft systems'' monitoring instruments and navigation and aircraft Provides education in the fundamental physics behind some of the key management instruments including glass cockpit and multi-function technologies found in aviation systems. The course primarily focuses displays. The course also covers instruments for engine and other aircraft on Electricity, Magnetisum and the basics physics behind electrical systems. systems. However, there is an additional small section on wave motion Prerequisites: AHM 1203, AVS 1013, LSM 1103 and thermodynamics. AVS 3023 Aero Engines (2-2-3) Prerequisites: AHM 1203, LSM 1103 Provides information on the construct and operation of aircraft AVS 1023 Aviation Calculus (3-1-3) propulsion systems. Areas of study include piston and gas turbine Presents the basic calculus concepts required for the student of engines, fuel and engine systems, gearing systems, accessories and aviation. Topics include differentiation and integration of algebraic propellers & rotors. Detail is also provided of thrust augmentation functions; applications to velocity, acceleration, area curve sketching and and control systems including: thrust reversal, thrust vectoring and computation of extreme values. afterburner Prerequisites: LSM 1103 Prerequisites: AHM 1203, LSM 1103 AVS 2113 Meteorology I (2-2-3) AVS 3033 Navigation (2-2-3) This course is devoted to basic meteorological knowledge essential to Students are shown how to prepare a navigation plan and carry out understanding the effect of weather on flight. -

NPA) No 13/2004 DRAFT DECISION of the EXECUTIVE DIRECTOR of the AGENCY, on Certification Specifications for Large Aeroplanes (CS-25
NPA No 13/2004 NOTICE OF PROPOSED AMENDMENT (NPA) No 13/2004 DRAFT DECISION OF THE EXECUTIVE DIRECTOR OF THE AGENCY, on certification specifications for large aeroplanes (CS-25) Miscellaneous Powerplant 1 NPA No 13/2004 Contents This Notice of Proposed Amendment is bundling the following original JAA NPAs which have followed the JAA consultation process: I) NPA 25E-337 “Safety Assessment of Powerplant Installations” II) NPA 25E-338 “Reversing System Requirement” III) NPA 25E-339 “Powerplant Shut-Off” IV) NPA 25E-340 “Powerplant Controls” This Notice of Proposed Amendment is made up of following parts : 0. GENERAL EXPLANATORY NOTE I-A. EXPLANATORY NOTE JAA NPA 25E-337 Describing the development process and explaining the contents of the proposal. I-B. PROPOSALS TRANSPOSED JAA NPA 25E-337 The actual proposed amendments. I-C. ORIGINAL JAA NPA 25E-337 proposals justification The proposals were already circulated for comments as a JAA NPA. This part contains the justification for the JAA NPA I-D. JAA NPA 25E-337 COMMENT-RESPONSE DOCUMENT This part summarizes the comments made on the JAA NPA and the responses to those comments. II-A. EXPLANATORY NOTE JAA NPA 25E-338 Describing the development process and explaining the contents of the proposal. II-B. PROPOSALS TRANSPOSED JAA NPA 25E-338 The actual proposed amendments. II-C. ORIGINAL JAA NPA 25E-338 proposals justification The proposals were already circulated for comments as a JAA NPA. This part contains the justification for the JAA NPA II-D. JAA NPA 25E-338 COMMENT-RESPONSE DOCUMENT This part summarizes the comments made on the JAA NPA and the responses to those comments. -

42278 Federal Register / Vol
42278 Federal Register / Vol. 65, No. 132 / Monday, July 10, 2000 / Rules and Regulations shipments; and (5) this rule provides a FOR FURTHER INFORMATION CONTACT: Jay materials introduce fatigue 60-day comment period, and any Turnberg, FAA, Engine and Propeller characteristics and failure modes that comments received will be considered Standards Staff, Engine and Propeller differ from metallic materials. prior to finalization of this rule. Directorate, Aircraft Certification The requirements of part 35 were Service, ANE±110, 12 New England established to address the airworthiness List of Subjects in 7 CFR Part 947 Executive Park, Burlington, considerations associated with metal Marketing agreements, Potatoes, Massachusetts, 01803±5229; telephone propeller blades. Propeller blades Reporting and recordkeeping (781) 238±7116; fax (781) 238±7199. constructed using composite material requirements. SUPPLEMENTARY INFORMATION: may be subject to damage due to the For the reasons set forth in the high impact forces associated with a preamble, 7 CFR Part 947 is amended as Background bird strike. Thus, composite propellers follows: On February 9, 1999, Hamilton must demonstrate propeller integrity Sundstrand applied for type following a bird strike. PART 947ÐIRISH POTATOES GROWN certification for a new model NP2000 Part 35 does not require a IN MODOC AND SISKIYOU COUNTIES, propeller. The NP2000 propeller uses a demonstration of propeller integrity CALIFORNIA, AND IN ALL COUNTIES digital electro-hydraulic control system following a lightning strike. Composite IN OREGON, EXCEPT MALHEUR and blades that are constructed of blades may not safely conduct or COUNTY composite material. dissipate the electrical current from a Conventional propellers on turboprop lightning strike. Severe damage can 1. -

Thrust Reverser Design Studies for an Over-The-Wing Stol Transport
https://ntrs.nasa.gov/search.jsp?R=19770012127 2020-03-22T11:41:38+00:00Z R77AEG190 NASA CR 151958 THRUST REVERSER DESIGN STUDIES FOR AN OVER-THE-WING STOL TRANSPORT by R.C. ANMER and H.D. SOWERS GENERAL ELECTRIC COMPANY (NASA-CE-151S58)i THRUST REVERSER DESIGN N77-'iS71-9 ' STUDIES ZOI' Al OVEE-THE-WING STOL TRANSPORT (Genezal Electric Co.) 67 p BC A04/MF A01 CSCI 21X Unclas G3/07 22677 Prepared For National Aeronautics and Space Administration NASA fResearch Center Contract NAS2-9254 i P h-G- 0 a l anP Report No. 0. 2. Government Accession No. 3, Recipient's Catalog No. NASA CR-1519 5B 4. Title and Subtitle 5. Report Date Thrust Reverser Design Studies for an Over-the-Wing March 1977 STOL Transport 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. R.C. Ammer and H.D. Sowers R77AEG190 10. Work Unit No. 9. Performing Organization Name and Address General Electric Company 11, Contract or Grant No. Aircraft Engine Group, AE&TPD Cincinnati, Ohio 45215 NAS2-9254 I3. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Contract Report National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D.C. 20546 15. Supplementary Notes Study Report NASA Technical Representative: M.D. Falarski NASA-Ames Research Center, Moffett Field, Calif. 94035 16. Abstract Aerodynamic and acoustics analytical studies were conducted to evaluate three thrust reverser design for potential use on commercial over-the-wing STOL transports. The concepts were: " Integral D nozzle/target reverser * Integral D nozzle/top arc cascade reverser * Post exit target reverser integral with wing. -
04 Propulsion
Aircraft Design Lecture 2: Aircraft Propulsion G. Dimitriadis and O. Léonard APRI0004-1, Aerospace Design Project, Lecture 4 1 Introduction • A large variety of propulsion methods have been used from the very start of the aerospace era: – No propulsion (balloons, gliders) – Muscle (mostly failed) – Steam power (mostly failed) – Piston engines and propellers – Rocket engines – Jet engines – Pulse jet engines – Ramjet – Scramjet APRI0004-1, Aerospace Design Project, Lecture 4 2 Gliding flight • People have been gliding from the- mid 18th century. The Albatross II by Jean Marie Le Bris- 1849 Otto Lillienthal , 1895 APRI0004-1, Aerospace Design Project, Lecture 4 3 Human-powered flight • Early attempts were less than successful but better results were obtained from the 1960s onwards. Gerhardt Cycleplane (1923) MIT Daedalus (1988) APRI0004-1, Aerospace Design Project, Lecture 4 4 Steam powered aircraft • Mostly dirigibles, unpiloted flying models and early aircraft Clément Ader Avion III (two 30hp steam engines, 1897) Giffard dirigible (1852) APRI0004-1, Aerospace Design Project, Lecture 4 5 Engine requirements • A good aircraft engine is characterized by: – Enough power to fulfill the mission • Take-off, climb, cruise etc. – Low weight • High weight increases the necessary lift and therefore the drag. – High efficiency • Low efficiency increases the amount fuel required and therefore the weight and therefore the drag. – High reliability – Ease of maintenance APRI0004-1, Aerospace Design Project, Lecture 4 6 Piston engines • Wright Flyer: One engine driving two counter- rotating propellers (one port one starboard) via chains. – Four in-line cylinders – Power: 12hp – Weight: 77 kg APRI0004-1, Aerospace Design Project, Lecture 4 7 Piston engine development • During the first half of the 20th century there was considerable development of piston engines. -

Review of Thrust Reverser Mechanism Used in Turbofan Jet Engine Aircraft
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 5 (2013), pp. 717-726 © International Research Publication House http://www.irphouse.com Review of Thrust Reverser Mechanism used in Turbofan Jet Engine Aircraft Mohd Anees Siddiqui1* and Md Shakibul Haq2 1Department of Mechanical Engineering, University Polytechnic, Integral University, Lucknow, INDIA. 2Department of Mechanical Engineering, University Polytechnic, Integral University Campus, Shahjahanpur, INDIA. Abstract Through this paper an initiative is taken to put focus on a special technique of thrust reverser mechanism which is common to the aviation industries but an uncommon in general. In this technique, forward thrust produced by jet engine of aircraft is diverged to reverse direction so as to provide an additional braking effect during landing and power back effect. This additional braking effect is responsible for reducing the landing run and other considerations related to safety of aircrafts. Different ways for thrust reverser i.e. Cascade type reverser system (cold stream), Clamshell door system (hot stream) and Bucket target system (hot stream) discussed. As Bucket target system has advantages over other systems of thrust reversal thus different mechanism of this type of thrust reversal are also discussed further. Keywords: Jet Engine, Thrust reverser, Bucket target. 1. Introduction Thrust reversal, also called reverse thrust, is the temporary diversion of an aircraft engine's exhaust so that the thrust produced is directed forward this acts against the forward travel of the aircraft, providing deceleration. Thrust reversers are used by many jet aircraft to help slow down just after touch-down, reducing wear on the brakes and enabling shorter landing distances.