Dynamic Synthetic Environments
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Achieve Your Vision
ACHIEVE YOUR VISION NE XT GEN ready CryENGINE® 3 The Maximum Game Development Solution CryENGINE® 3 is the first Xbox 360™, PlayStation® 3, MMO, DX9 and DX10 all-in-one game development solution that is next-gen ready – with scalable computation and graphics technologies. With CryENGINE® 3 you can start the development of your next generation games today. CryENGINE® 3 is the only solution that provides multi-award winning graphics, physics and AI out of the box. The complete game engine suite includes the famous CryENGINE® 3 Sandbox™ editor, a production-proven, 3rd generation tool suite designed and built by AAA developers. CryENGINE® 3 delivers everything you need to create your AAA games. NEXT GEN ready INTEGRATED CryENGINE® 3 SANDBOX™ EDITOR CryENGINE® 3 Sandbox™ Simultaneous WYSIWYP on all Platforms CryENGINE® 3 SandboxTM now enables real-time editing of multi-platform game environments; simul- The Ultimate Game Creation Toolset taneously making changes across platforms from CryENGINE® 3 SandboxTM running on PC, without loading or baking delays. The ability to edit anything within the integrated CryENGINE® 3 SandboxTM CryENGINE® 3 Sandbox™ gives developers full control over their multi-platform and simultaneously play on multiple platforms vastly reduces the time to build compelling content creations in real-time. It features many improved efficiency tools to enable the for cross-platform products. fastest development of game environments and game-play available on PC, ® ® PlayStation 3 and Xbox 360™. All features of CryENGINE 3 games (without CryENGINE® 3 Sandbox™ exception) can be produced and played immediately with Crytek’s “What You See Is What You Play” (WYSIWYP) system! CryENGINE® 3 Sandbox™ was introduced in 2001 as the world’s first editor featuring WYSIWYP technology. -

Crysis 2 Full Hd Patch
Crysis 2 full hd patch click here to download All three Crysis 2 DirectX 11 Ultra Upgrade files are available to download via a fast, queue-free server. You are free to download the DirectX 11 update and high resolution packs, however, as they work with all versions of the game – just ensure you're patched to version before installing them. Hi-Res Texture Pack. Enhance your copy of Crysis 2 with the DirectX 11 Ultra Upgrade. This pack has three files: the Patch , DirectX 11 Ultra Upgrade and High Resolution Texture Pack. Extreme Immersive Mod v + New TOD Demostartion | Crysis Max Settings | Directx 10 | p. This is a gameplay for Crysis 2 with High Resolution Texture Pack with patch , using DirectX 11 Ho. C:\Program Files (x86)\Steam\SteamApps\common\Crysis 2 Game of the Year\patch you already have this Patches. Download the DirectX 11 Ultra Upgrade and the High Resolution Texture Pack After Installation you have to That means a complete new Story for free! The Game itself is not needed! I'm pretty sure at some point in the future, Crysis 2 will be in a Steam or Origin sale. And you might buy it and then be sickened to the core by the vile March level graphics. Ugh, I'm embarrassed that we accepted it as a game back then, with its DX11 shaders and an official HD texture pack that looks as. The high-rez pack is definitely a must if you wanna see Crysis 2 in its full glory! The DX11 patch as well, i play crysis2 and the hd pack is a hindrance on multiplayer you need best fps and they will reduce yours by a good 30%+ even when you turn everything down to minimum. -

EA and Crytek Recruit Players Into Free Trial for Crysis Wars
EA and Crytek Recruit Players Into Free Trial for Crysis Wars New Players Can Experience the Critically-Acclaimed Multiplayer Action GameFree from April 9- April 17 and Get the Complete Crysis CompilationCrysis Maximum EditionStarting May 5 REDWOOD CITY, Calif., Apr 09, 2009 (BUSINESS WIRE) -- Electronic Arts Inc. (NASDAQ:ERTS) and Crytek GmbH announced the start of a free trial period for Crysis Wars(R)*, the multiplayer game for Crysis Warhead(R), the award-winning first-person shooter originally released last Fall. Starting today, gamers can play all of Crysis Wars** online for free including each of the game's three action-packed multiplayer modes and all 23 maps. The free trial period runs until Friday, April 17, 2009. This trial is designed to give players a sample of the signature action and visuals that only the Crysis(R) series delivered. For those players that want more than just a sample, EA and Crytek will release Crysis(R) Maximum Edition, a compilation of all three Crysis games in one box (Crysis, Crysis Warhead and Crysis Wars). Available beginning May 5th for the MSRP of $39.99, Crysis Maximum Edition is the ultimate Crysis experience. "When Crysis Wars was released seven months ago, one of our biggest goals was to be able to deliver continued support to our growing multiplayer community," said Cevat Yerli, CEO and President of Crytek. "We think we have delivered on that promise, not only by releasing new content, fixes and our powerful MOD SDK, but also by continuing to offer these types of free trials." Crysis Wars supports matches for up to 32 players and contains three distinct gameplay modes; InstantAction, frenetic deathmatch enhanced by the power of the nanosuit, PowerStruggle, a hardcore team-based mode and TeamInstantAction, a mix of fast-paced action in a team-based environment. -

EA and Crytek Launches Crysis Warhead in North America and Europe
EA and Crytek Launches Crysis Warhead in North America and Europe The Next Installment of the Award-Winning Crysis Franchise Arrives at Retail Stores This Week REDWOOD CITY, Calif., Sep 16, 2008 (BUSINESS WIRE) -- Electronic Arts Inc. (NASDAQ:ERTS) and Crytek GmbH announced today that Crysis Warhead(R), the next installment in the award-winning Crysis(R) franchise, has shipped to retailers in North America and Europe and will hit store shelves and participating digital download services starting September 18, 2008 exclusively for the PC. Containing a new single player campaign featuring Crytek's trademark open-ended gameplay and stunning visuals along with Crysis Wars(R), the exciting new multiplayer suite for the Crysis universe, Crysis Warhead is a tremendous value at only $29.99 and does not require the original Crysis to play. "The launch of Crysis Warhead marks a significant milestone for the entire Crytek family," said Cevat Yerli, CEO and President of Crytek. "The team at Crytek Hungary has delivered a dynamic and intense single player experience more than worthy of the Crysis franchise, while the multiplayer team in Frankfurt has revisited and extended multiplayer in the Crysis universe with Crysis Wars. They are both great representations of our studio's core values of technical excellence, craftsmanship and quality." "Crytek is a world-class partner and quickly becoming one of the most formidable independent developers in the industry," said David DeMartini, Senior Vice President and General Manager of EA Partners. "Crysis was one of the best games of last year and we are thrilled to have the opportunity to bring Crysis Warhead, a game that actually improves upon Crysis' core experience, to the largest possible audience on a global stage." Crysis Warhead takes place alongside the events of last year's critical hit, with players experiencing the explosive battles against waves of challenging enemies on the other side of the island through the eyes and nanosuit of the bold and aggressive Sergeant "Psycho" Sykes. -
GAME CAREER GUIDE July 2016 Breaking in the Easy(Ish) Way!
TOP FREE GAME TOOLS JULY 2016 GAME FROM GAME EXPO TO GAME JOB Indie intro to VR Brought to you by GRADUATE #2 PROGRAM JULY 2016 CONTENTS DEPARTMENTS 4 EDITOR’S NOTE IT'S ALL ABOUT TASTE! 96 FREE TOOLS FREE DEVELOPMENT TOOLS 2016 53 GAME SCHOOL DIRECTORY 104 ARRESTED DEVELOPMENT There are tons of options out there in terms INDIE DREAMIN' of viable game schools, and this list is just the starting point to get you acquainted with the schools near you (or far from you, if that’s what STUDENT POSTMORTEM you prefer!). 32 BEGLITCHED 72 VIRTUALLY DESIGNED NYU Game Center students Alec Thomson and Jennu Jiao Hsia discuss their IGF Award- VR has quickly moved from buzzword, to proto- winning match three game about insecurity type, to viable business. This guide will help you within computers, and within ourselves. get started in VR development, avoiding some common pitfalls. FEATURES 78 SOUNDS GOOD TO ME! 8 BREAKING IN THE EASY(ISH) WAY! Advice for making audio (with or without) How attending expos can land you a job. an audio specialist. 18 ZERO TO HERO Hey! You want to learn low poly modeling but 84 A SELLER’S MARKET don’t know where to start? Look no further! Marketing fundamentals for your first game. With this guide, we hope to provide a good introduction to not only the software, but 90 INTRO TO GAME ENGINES also the concepts and theory at play. A brief discussion of some of the newest and most popular DO YOU NEED A PUBLISHER? 34 game engines. -
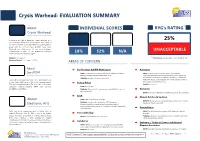
Crysis Warhead: EVALUATION SUMMARY
Crysis Warhead: EVALUATION SUMMARY About INDIVIDUAL SCORES RYG’s RATING* Crysis Warhead Developed by Crytek Budapest, Crysis Warhead is a 25% science fiction, first-person shooter game and is part of the Crysis franchise. Crysis Warhead’s story takes place in parallel with the events of Crysis. And, like Crysis, Crysis Warhead was criticised for its very steep hardware UNACCEPTABLE requirements in spite of its significant gameplay 18% 32% N/A improvements over its predecessor. Medium: Disc Version * RYG’s Rating is an aggregate of the Individual Scores Versions Tested: 1.0.12 and 1.1.1.710 AREAS OF CONCERN About Pre-Purchase & DRM Notification Activation SecuROM DRM: Documentation inconsistent between Publisher’s websites, DRM: Online activation; Non-disclosure of information Gaming Package, Manual, Readme and EULA. required/requested for activation; Non-disclosure of where the Publisher: As above; Demo not provided. information is sent/received; Hardware activation; Constant disc SecuROM is developed by Sony DADC and remains one verification; Resale not permissible; No documentation provided of the oldest DRM series in the Video Gaming market. with respect to activation process. Privacy Policy This version implemented by Electronic Arts is an online- Publisher: As above. activation, hardware-binding DRM with software DRM: Non-existent. blacklisting capabilities. Publisher: Very scant; No contacts as per their EULA; No opt-out Gameplay option provided. BOTH: Connection difficulties to Publisher’s servers after activation. EULA Manual Patches & Updates About DRM: DRM information inconsistent. BOTH: Rollback option not provided; Sunset option not provided; Publisher: As above; Not written for AUS Consumers; Installation logs not provided. -

Crytek Und Dena Bieten Mit the Collectables Bald Blockbuster-Action Für Mobile Gamer
Crytek und DeNA bieten mit The Collectables bald Blockbuster-Action für mobile Gamer FRANKFURT AM MAIN, Deutschland und SAN FRANCISCO, USA, 12. Dezember 2013/PRNewswire/ -- Crytek arbeitet mit dem führenden Entwickler und Betreiber von mobilen Spielen DeNA an der Entwicklung seines ersten kostenlos spielbaren Mobilegames The Collectables . Die Grafik von The Collectables beruht auf Cryteks hauseigener CRYENGINE- Technologie. Das Spiel wird über DeNAs Mobile-Games-Plattform Mobage für iPhone, iPad und Android-Geräte erhältlich sein. Es bietet eine Mischung aus Action und Taktik: Der Spieler leitet dabei eine Einheit unkonventioneller Soldaten auf knallharten Einsätzen rund um die Welt. „DeNA verfügt über konkurrenzlose Erfahrung im Bereich Mobile Gaming, und wir freuen uns sehr darauf, zusammen daran arbeiten zu können, den Spielern The Collectables zu präsentieren“, so Paha Schulz, Director of Business Development im Bereich Games-as-a-Service bei Crytek. „ The Collectables nutzt als erstes kostenlos spielbares mobiles Spiel Cryteks hochmoderne 3D-Game-Technologie CRYENGINE.“ Mit seinen actiongeladenen Gefechten und klassischen, unbeugsamen Helden lädt The Collectables Spieler dazu ein, aus einer Vielzahl einzigartiger Soldaten ein Team zusammenzustellen und dessen Waffen und Fähigkeiten vor den Kampfeinsätzen kontinuierlich aufzubessern. Bei seinem Erscheinen im Jahr 2014 soll The Collectables sämtliche Spieler mit allerlei Arten von Gegnern, spielentscheidenden Belohnungen, die es freizuschalten gilt, und weitläufigen 3D-Kampfschauplätzen, -

Crysis Warhead Photorealistic Mod Download Crysis: Warhead - V1.1.1687 +6 Trainer - Download
crysis warhead photorealistic mod download Crysis: Warhead - v1.1.1687 +6 Trainer - Download. Gameplay-facilitating trainer for Crysis: Warhead . This trainer may not necessarily work with your copy of the game. file type Trainer. file size 3.8 MB. last update Wednesday, June 13, 2012. Report problems with download to [email protected] In order to unpack this file after download, please enter the following password: trainer . For unpacking files we recommend using a free software - 7-Zip. Unzip the contents of the archive, run the trainer, and then the game. During the game you will be able to use the following keys: NUMPAD2 -unlimited energy nanopancerza. NUMPAD3 -unlimited amount of Ammo. NUMPAD4 -infinite number of grenades. NUMPAD5 -weapons not be product overheating. NUMPAD6 � you do not need to reload weapons. Please Note! Trainer works with version 1.1.1687 of the game. Last update: Wednesday, June 13, 2012 Genre: Action File size: 3.8 MB. Note: The cheats and tricks listed above may not necessarily work with your copy of the game. This is due to the fact that they generally work with a specific version of the game and after updating it or choosing another language they may (although do not have to) stop working or even malfunction. Extra care should be taken with modifications, trainers, and other things that were not created by the game�s developers. In this case the possibility of malfunctioning or even damaging the game, which may necessitate reinstalling the game, is particularly high. Photorealistic Crysis With Real Lifesis Mod. About one and a half years ago, Crytek shocked the PC gaming world with its first-person shooter Crysis - not only with its beautiful and impressive graphics, but also with hardware requirements which were both out of this world. -

1 Tricia Gugler
Tricia Gugler: Welcome to our first quarter fiscal 2009 earnings call. Today on the call we have John Riccitiello, our Chief Executive Officer; Eric Brown, our Chief Financial Officer; John Pleasants, our Chief Operating Officer; and Peter Moore, our President of EA SPORTS. Before we begin, I’d like to remind you that you may find copies of our SEC filings, our earnings release and a replay of this webcast on our web site at investor.ea.com. Shortly after the call we will post a copy of our prepared remarks on our website. Throughout this call we will present both GAAP and non-GAAP financial measures. Non-GAAP measures exclude the following items: • amortization of intangibles, • stock-based compensation, • acquired in-process technology, • restructuring charges, • certain litigation expenses, • losses on strategic investments, • the impact of the change in deferred net revenue related to certain packaged goods and digital content. In addition, starting with its fiscal 2009 results, the Company began to apply a fixed, long-term projected tax rate of 28% to determine its non-GAAP results. Prior to fiscal 2009, the Company’s non-GAAP financial results were determined by excluding the specific income tax effects associated with the non-GAAP items and the impact of certain one-time income tax adjustments. Our earnings release provides a reconciliation of our GAAP to non-GAAP measures. These non-GAAP measures are not intended to be considered in isolation from – a substitute for – or superior to – our GAAP results – and we encourage investors to consider all measures before making an investment decision. -

An Overview Study of Game Engines
Faizi Noor Ahmad Int. Journal of Engineering Research and Applications www.ijera.com ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.1673-1693 RESEARCH ARTICLE OPEN ACCESS An Overview Study of Game Engines Faizi Noor Ahmad Student at Department of Computer Science, ACNCEMS (Mahamaya Technical University), Aligarh-202002, U.P., India ABSTRACT We live in a world where people always try to find a way to escape the bitter realities of hubbub life. This escapism gives rise to indulgences. Products of such indulgence are the video games people play. Back in the past the term ―game engine‖ did not exist. Back then, video games were considered by most adults to be nothing more than toys, and the software that made them tick was highly specialized to both the game and the hardware on which it ran. Today, video game industry is a multi-billion-dollar industry rivaling even the Hollywood. The software that drives these three dimensional worlds- the game engines-have become fully reusable software development kits. In this paper, I discuss the specifications of some of the top contenders in video game engines employed in the market today. I also try to compare up to some extent these engines and take a look at the games in which they are used. Keywords – engines comparison, engines overview, engines specification, video games, video game engines I. INTRODUCTION 1.1.2 Artists Back in the past the term ―game engine‖ did The artists produce all of the visual and audio not exist. Back then, video games were considered by content in the game, and the quality of their work can most adults to be nothing more than toys, and the literally make or break a game. -

Frequently Asked Questions
Frequently Asked Questions +Collect Windows log files Windows log files can be used to troubleshoot and diagnose issues you may encounter while playing games and watching videos. You may be asked by technical support to provide various log files so they can further help you to solve the problem. Here's how to obtain some of the most commonly used files: DirectX Diagnostic files System Information files Windows System and Application Event log files Installation log files DirectX Diagnostic files DirectX is a programming interface that handles Windows tasks related to multimedia, especially game programming and video. The DirectX Diagnostic file contains information about this interface and its current status. Here’s how to generate a DirectX Diagnostic file: 1. Hold down the Windows key and press R. 2. In the Run dialog box, type DXDIAG and then click OK. This opens the DirectX diagnostic tool. 3. On the bottom of the DirectX Diagnostic Tool window, click Save All Information. 4. When prompted, save the file to your Desktop with the file name DXDIAG. 5. Click Save. 6. Attach the file when you reply to Support. System Information files The Microsoft System Information tool collects system information, such as devices installed on your computer and any associated device drivers. To generate a System Information file: 1. Hold down the Windows key and press R. 2. In the Run dialog box, type MSINFO32 and then click OK. This opens the System Information diagnostic panel. 3. In the menu bar on the left, click File, and then click Save. This will prompt you to choose a location to save the file. -

Troubleshooting Guide
TROUBLESHOOTING GUIDE Solved - Issue with USB devices after Windows 10 update KB4074588 Logitech is aware of a Microsoft update (OS Build 16299.248) which is reported to affect USB support on Windows 10 computers. Support statement from Microsoft "After installing the February 13, 2018 security update, KB4074588 (OS Build 16299.248), some USB devices and onboard devices, such as a built-in laptop camera, keyboard or mouse, may stop working for some users." If you are using Microsoft Windows 10, (OS Build 16299.248) and are having USB-related issues. Microsoft has released a new update KB4090913 (OS Build 16299.251) to resolve this issue. We recommend you follow Microsoft Support recommendations and install the latest Microsoft Windows 10 update: https://support.microsoft.com/en-gb/help/4090913/march5- 2018kb4090913osbuild16299-251. This update was released by Microsoft on March 5th in order to address the USB connection issues and should be downloaded and installed automatically using Windows Update. For instructions on installing the latest Microsoft update, please see below: If you have a working keyboard/mouse If you have a non-working keyboard/mouse If you have a working keyboard/mouse: 1. Download the latest Windows update from Microsoft. 2. If your operating system is 86x-based, click on the second option. If your operating system is 64x-based, click on the third option. 3. Once you have downloaded the update, double-click on the downloaded file and follow the on-screen instructions to complete the update installation. NOTE: If you wish to install the update manually, you can download the 86x and 64x versions of the update from http://www.catalog.update.microsoft.com/Search.aspx?q=KB4090913 If you currently have no working keyboard/mouse: For more information, see the Microsoft article on how to start and use the Windows 10 Recovery Environment (WinRE): https://support.microsoft.com/en-us/help/4091240/usb-devices-may-stop-working-after- installing-the-february-13-2018-upd Do the following: 1.