A Precision Radio Clock for WWV Transmissions David L
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The BPL Dilemma
Reprinted with permission from CQ VHF Magazine, Spring 2004 issue. Copyright CQ Communications 2004 The BPL Dilemma Hams claim Broadband over Power Lines will interfere with their on-the-air operations. The utility companies claim not. Read how they are both right . sort of. By Gary Pearce,* KN4AQ still academic. They haven’t encountered Because of the importance of the it yet. I will provide a quick tutorial. Broadband over Power Lines (BPL) The basics of BPL are simple. It is a issue, “FM” columnist Gary Pearce, method of delivering high-speed internet KN4AQ, devotes his space this time to the to homes and small businesses using the investigation of a BPL test site and the local power lines that crisscross neigh- surrounding area. He will be back in the borhoods either overhead or under- next issue of CQ VHF with his regular ground. This is a brilliantly obvious idea column material. —N6CL (“the wires are already there!”) that was delayed because the AC power grid is a really noisy, crappy signal-delivery ince last fall, I’ve been up to my medium for anything above 60 Hz. The eyeballs in BPL—Broadband over march of technology, however, is mak- Power Lines—and its effect on ing it feasible. It is the third method of Samateur radio. If you’re up on current TV doing that, following DSL (Digital culture, you can call it “HF Eye for the FM Subscriber Line) on the phone lines and Guy.” Our area has been “lucky” enough cable TV (nobody’s come up with a cute to host one of the few BPL trials, courtesy name or acronym for broadband over of my local power company, Progress cable TV; they just call it “cable”). -

A Century of WWV
Volume 124, Article No. 124025 (2019) https://doi.org/10.6028/jres.124.025 Journal of Research of the National Institute of Standards and Technology A Century of WWV Glenn K. Nelson National Institute of Standards and Technology, Radio Station WWV, Fort Collins, CO 80524, USA [email protected] WWV was established as a radio station on October 1, 1919, with the issuance of the call letters by the U.S. Department of Commerce. This paper will observe the upcoming 100th anniversary of that event by exploring the events leading to the founding of WWV, the various early experiments and broadcasts, its official debut as a service of the National Bureau of Standards, and its role in frequency and time dissemination over the past century. Key words: broadcasting; frequency; radio; standards; time. Accepted: September 6, 2019 Published: September 24, 2019 https://doi.org/10.6028/jres.124.025 1. Introduction WWV is the high-frequency radio broadcast service that disseminates time and frequency information from the National Institute of Standards and Technology (NIST), part of the U.S. Department of Commerce. WWV has been performing this service since the early 1920s, and, in 2019, it is celebrating the 100th anniversary of the issuance of its call sign. 2. Radio Pioneers Other radio transmissions predate WWV by decades. Guglielmo Marconi and others were conducting radio research in the late 1890s, and in 1901, Marconi claimed to have received a message sent across the Atlantic Ocean, the letter “S” in telegraphic code [1]. Radio was called “wireless telegraphy” in those days and was, if not commonplace, viewed as an emerging technology. -
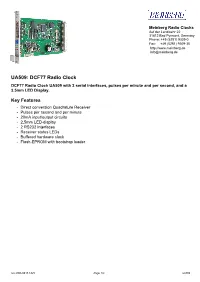
UA509: DCF77 Radio Clock DCF77 Radio Clock UA509 with 2 Serial Interfaces, Pulses Per Minute and Per Second, and a 2.5Mm LED Display
Meinberg Radio Clocks Auf der Landwehr 22 31812 Bad Pyrmont, Germany Phone: +49 (5281) 9309-0 Fax: +49 (5281) 9309-30 http://www.meinberg.de [email protected] UA509: DCF77 Radio Clock DCF77 Radio Clock UA509 with 2 serial interfaces, pulses per minute and per second, and a 2.5mm LED Display. Key Features - Direct conversion Quadrature Receiver - Pulses per second and per minute - 20mA input/output circuits - 2,5mm LED-display - 2 RS232 interfaces - Receiver status LEDs - Buffered hardware clock - Flash-EPROM with bootstrap loader rev 2006.0615.1425 Page 1/3 ua509 Description The hardware of UA509 is a 100mm x 160mm microprocessor board. The 20mm wide front panel contains an 8-digit LED display (2.5mm), three LED indicators and a time/date switch. The receiver is connected to the external ferrite antenna AI01 that is included in the sope of supply by the 5 meter 50 ohm coaxial cable (other lengths available). The radio controlled clock UA509 has been designed for applications where two independent serial interfaces are needed. The UA509 contains a flash EPROM with bootstrap loader that allows to upload a new firmware via the serial interface without removal of the clock. Characteristics Type of receiver Narrowband DCF77 quadrature receiver with automatic gain control, bandwidth: approx. 20Hz Display 8 digit 7-segment LED display (2.5mm) for time or date (switch-selectable) optional: 20HP (100mm) wide front panel with 10mm height 7-segment LED display Status info Modulation and field strength visualized by LEDs Free running state visualized by LED after switching to free running quartz clock mode Synchronization time 2-3 minutes after correct DCF77 signal reception Accuracy free run Accuracy of the quartz base after min. -
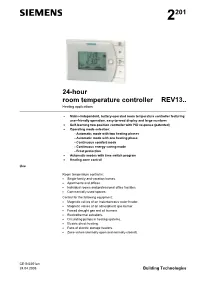
2201 24-Hour Room Temperature Controller REV13
s 2201 24-hour room temperature controller REV13.. Heating applications • Mains-independent, battery-operated room temperature controller featuring user-friendly operation, easy-to-read display and large numbers • Self-learning two-position controller with PID response (patented) • Operating mode selection: - Automatic mode with two heating phases - Automatic mode with one heating phase - Continuous comfort mode - Continuous energy saving mode - Frost protection • Automatic modes with time switch program • Heating zone control Use Room temperature control in: • Single-family and vacation homes. • Apartments and offices. • Individual rooms and professional office facilities. • Commercially used spaces. Control for the following equipment: • Magnetic valves of an instantaneous water heater. • Magnetic valves of an atmospheric gas burner. • Forced draught gas and oil burners. • Electrothermal actuators. • Circulating pumps in heating systems. • Electric direct heating. • Fans of electric storage heaters. • Zone valves (normally open and normally closed). CE1N2201en 24.04.2008 Building Technologies Function • PID control with self-learning or selectable switching cycle time • 2-point control • 24-hour time switch • Remote control • Preselected 24-hour operating modes • Override function • Party mode • Frost protection mode • Information level to check settings • Reset function • Sensor calibration • Minimum limitation of setpoint • Synchronization to radio time signal from Frankfurt, Germany (REV13DC) Type summary 24-hour room temperature controller REV13 24-hour room temperature controller with receiver for time signal from Frankfurt, Germany (DCF77) REV13DC Ordering Please indicate the type number as per the "Type summary" when ordering. Delivery The controller is supplied with batteries. Mechanical design Plastic casing with an easy-to-read display and large numbers, easily accessible operating elements, and removable base. -

Clock Synchronization Clock Synchronization Part 2, Chapter 5
Clock Synchronization Clock Synchronization Part 2, Chapter 5 Roger Wattenhofer ETH Zurich – Distributed Computing – www.disco.ethz.ch 5/1 5/2 Overview TexPoint fonts used in EMF. Motivation Read the TexPoint manual before you delete this box.: AAAA A • Logical Time (“happened-before”) • Motivation • Determine the order of events in a distributed system • Real World Clock Sources, Hardware and Applications • Synchronize resources • Clock Synchronization in Distributed Systems • Theory of Clock Synchronization • Physical Time • Protocol: PulseSync • Timestamp events (email, sensor data, file access times etc.) • Synchronize audio and video streams • Measure signal propagation delays (Localization) • Wireless (TDMA, duty cycling) • Digital control systems (ESP, airplane autopilot etc.) 5/3 5/4 Properties of Clock Synchronization Algorithms World Time (UTC) • External vs. internal synchronization • Atomic Clock – External sync: Nodes synchronize with an external clock source (UTC) – UTC: Coordinated Universal Time – Internal sync: Nodes synchronize to a common time – SI definition 1s := 9192631770 oscillation cycles of the caesium-133 atom – to a leader, to an averaged time, ... – Clocks excite these atoms to oscillate and count the cycles – Almost no drift (about 1s in 10 Million years) • One-shot vs. continuous synchronization – Getting smaller and more energy efficient! – Periodic synchronization required to compensate clock drift • Online vs. offline time information – Offline: Can reconstruct time of an event when needed • Global vs. -
N O T I C E This Document Has Been Reproduced From
N O T I C E THIS DOCUMENT HAS BEEN REPRODUCED FROM MICROFICHE. ALTHOUGH IT IS RECOGNIZED THAT CERTAIN PORTIONS ARE ILLEGIBLE, IT IS BEING RELEASED IN THE INTEREST OF MAKING AVAILABLE AS MUCH INFORMATION AS POSSIBLE r^i 44 The University of Tennessee Department of Electrical Engineering Knoxville, Tennessee 37916 (NASA-C,9-1bu791) A SIULY OF LNIYEASA.I N82--2! MODULATICN TECHN101 S APPL11 D TO SA?ELLI;TE 4 DATA COLLECTION Final Report (Tennessee tFn v.) 176 p HC A09/MF A01 CSCL 1711 Uncla G3/32 21917 A STUDY OF UNIVERSAL MODULATION TECHNIQUES APPLIED TO SATELLITE DATA COLLECTION If ^^ tit Final Report Y December 1980 Contract No. NAS5-24250 Prepared for National Aeronautics and Space Administration Goddard Space Flight Center r Greenbelt, Maryland 20771 f i PRECEDING PAGE BLANK NOT FILMED .Osp* Abstract A scheme for a universal modulation and frequency control system for use with data-collection platform (DCP) transmitters is examined. The final design discussed can, under software/firmwave control, generate all of the specific digital data modulation formats currently used in the NASA satellite data-collection service and can simultaneously synthesize the proper RF carrier frequencies employed, A novel technique for DCP time and frequency control is presented, The emissions: of NBS rad o station WW/WWVH are received, detected, and finally decoded in microcomputer software to generate a highly accurate time base for the platform; with the assistance of external hardware, the microcomputer also directs the recalibration of all DCP oscillators to achieve very high frequency accuracies and low drift rates versus tem perature, supply voltage, and time. -

Species Selection in a Global Change Scenario Francesco Ferrini and Alessio Fini
Planning the Green City of 2050: Species Selection in a Global Change Scenario Francesco Ferrini and Alessio Fini Department of Agri-Food Production and Environmental Sciences University of Florence – Italy Viale delle Idee, 30 – 50019 Sesto Fiorentino (Florence) - Italy Abstract The presentation will focused on the technical and practical solutions for the selection of trees that might be the best choice in the urban environments for the next 100 years, given differences in urban sites (infrastructures, climate, soils etc), species attributes, management requirements and climate change. The presentation will be divided in the following parts: • Trees and climate change in the urban environment (main characteristics of the urban areas. Tree physiology as influenced by typical environmental constraints of urban stands). • Trees and infrastructure (Improving relations between technical infrastructures and vegetation. • Selection of planting material in a global change scenario Presenter Biography Francesco Ferrini, Ph.D. Full Professor at the Department of Agri-Food and Environmental Sciences – University of Florence (Italy). Scientific activity focused on: Impact of plant selection and nursery production practices on root regeneration and tree growth after planting Physiological and growth aspects of different species as affected by different cultivation techniques after planting in the urban environment Evaluation of morpho-physiological and biochemical parameters to study urban stress tolerance on tree species. Evaluation of the ability of shrub and tree species to mitigate the effect of pollution in the urban and periurban environment Planning the green city in the global change era: urban tree functions and suitability for predicted future climates (TreeCity) From 1990 he has published more than 210 scientific and technical papers in Italian (112) and in English (101) in international referred and nationwide journals. -

KHF 950/990 HF Communications Transceiver PILOT’S GUIDE and DIRECTORY of HF SERVICES
KHF 950/990 HF Communications Transceiver PILOT’S GUIDE AND DIRECTORY OF HF SERVICES A Table of Contents INTRODUCTION KHF 950/990 COMMUNICATIONS TRANSCEIVER . .I SECTION I CHARACTERISTICS OF HF SSB WITH ALE . .1-1 ACRONYMS AND DEFINITIONS . .1-1 REFERENCES . .1-1 HF SSB COMMUNICATIONS . .1-1 FREQUENCY . .1-2 SKYWAVE PROPAGATION . .1-3 WHY SINGLE SIDEBAND IS IMPORTANT . .1-9 AMPLITUDE MODULATION (AM) . .1-9 SINGLE SIDEBAND OPERATION . .1-10 SINGLE SIDEBAND (SSB) . .1-10 SUPPRESSED CARRIER VS. REDUCED CARRIER . .1-10 SIMPLEX & SEMI-DUPLEX OPERATION . .1-11 AUTOMATIC LINK ESTABLISHMENT (ALE) . .1-11 FUNCTIONS OF HF RADIO AUTOMATION . .1-11 ALE ASSURES BEST COMM LINK AUTOMATICALLY . .1-12 SECTION II KHF 950/990 SYSTEM DESCRIPTION. .2-1 KCU 1051 CONTROL DISPLAY UNIT . .2-1 KFS 594 CONTROL DISPLAY UNIT . .2-3 KCU 951 CONTROL DISPLAY UNIT . .2-5 KHF 950 REMOTE UNITS . .2-6 KAC 952 POWER AMPLIFIER/ANT COUPLER .2-6 KTR 953 RECEIVER/EXITER . .2-7 ADDITIONAL KHF 950 INSTALLATION OPTIONS .2-8 SINGLE KHF 950 SYSTEM CONFIGURATION .2-9 KHF 990 REMOTE UNITS . .2-10 KAC 992 PROBE/ANTENNA COUPLER . .2-10 KTR 993 RECEIVER/EXITER . .2-11 SINGLE KHF 990 SYSTEM CONFIGURATION . .2-12 Rev. 0 Dec/96 KHF 950/990 Pilots Guide Toc-1 Table of Contents SECTION III OPERATING THE KHF 950/990 . .3-1 KHF 950/990 GENERAL OPERATING INFORMATION . .3-1 PREFLIGHT INSPECTION . .3-1 ANTENNA TUNING . .3-2 FAULT INDICATION . .3-2 TUNING FAULTS . .3-3 KHF 950/990 CONTROLS-GENERAL . .3-3 KCU 1051 CONTROL DISPLAY UNIT OPERATION . -

Time Signal Stations 1By Michael A
122 Time Signal Stations 1By Michael A. Lombardi I occasionally talk to people who can’t believe that some radio stations exist solely to transmit accurate time. While they wouldn’t poke fun at the Weather Channel or even a radio station that plays nothing but Garth Brooks records (imagine that), people often make jokes about time signal stations. They’ll ask “Doesn’t the programming get a little boring?” or “How does the announcer stay awake?” There have even been parodies of time signal stations. A recent Internet spoof of WWV contained zingers like “we’ll be back with the time on WWV in just a minute, but first, here’s another minute”. An episode of the animated Power Puff Girls joined in the fun with a skit featuring a TV announcer named Sonny Dial who does promos for upcoming time announcements -- “Welcome to the Time Channel where we give you up-to- the-minute time, twenty-four hours a day. Up next, the current time!” Of course, after the laughter dies down, we all realize the importance of keeping accurate time. We live in the era of Internet FAQs [frequently asked questions], but the most frequently asked question in the real world is still “What time is it?” You might be surprised to learn that time signal stations have been answering this question for more than 100 years, making the transmission of time one of radio’s first applications, and still one of the most important. Today, you can buy inexpensive radio controlled clocks that never need to be set, and some of us wear them on our wrists. -

2203 Weekday / Weekend Room Temperature Controller REV17
s 2203 Weekday / weekend room temperature controller REV17.. Heating applications • Mains-independent, battery-operated room temperature controller featuring user-friendly operation, easy-to-read display and large numbers • Self-learning two-position controller with PID response (patented) • Operating mode selection: - 7-day (weekday / weekend) automatic mode. with max. 3 heating phases - Continuous comfort mode - Continuous energy saving mode - Frost protection - Exception day (24 hour operation) with max. 3 heating phases • A separate temperature setpoint can be entered in automatic mode and for the exception day for each heating phase • To control a heating zone Use Room temperature control in: • Single-family and vacation homes • Apartments and offices • Individual rooms and professional office facilities • Commercially used spaces Control for the following equipment: • Magnetic valves of an instantaneous water heater • Magnetic valves of an atmospheric gas burner • Forced draught gas and oil burners • Electrothermal actuators • Circulating pumps in heating systems • Electric direct heating • Fans of electric storage heaters • Zone valves (normally open or normally closed) CE1N2203en 24.04.2008 Building Technologies Function • PID control with self-learning or selectable switching cycle time • 2-point control • 7-day time switch • Remote control • Preselected 24-hour operating modes • Override function • Holiday mode • Party mode • Frost protection mode • Information level to check settings • Reset function • Sensor calibration • Minimum limitation of setpoint • Periodic pump run Protection against valve seizure • Synchronization to radio time signal from Frankfurt, Germany (REV17DC) Type summary Room temperature controller with 7-day (weekday/weekend) time switch REV17 Room temperature controller with 7-day (weekday/weekend) time switch and receiver for time signal from Frankfurt, Germany (DCF77) REV17DC Ordering Please indicate the type number as per the "Type summary" when ordering. -
DLC32 / DATAREG 32C Data Logger
DLC32 / DATAREG 32C Data logger User Manual Doc.-No: E122211209022 Baer Industrie-Elektronik GmbH Rathsbergstr. 23 D-90411 Nürnberg Phone: +49 (0)911 970590 Fax: +49 (0)911 9705950 Internet: www.baer-gmbh.com COPYRIGHT Copyright © 2009 BÄR Industrie-Elektronik GmbH All rights, including those originating from translation, (re)-printing and copying of this document or parts thereof are reserved. No part of this manual may be copied or distributed by electronic, mechanic, photographic or indeed any other means without prior written consent of BÄR Industrie-Elektronik GmbH. All names of products or companies contained in this document may be trademarks or trade names of their respective owners. Note Based on its policies, BÄR Industrie-Elektronik GmbH develops and improves their products on an ongoing basis. In consequence, BÄR Industrie-Elektronik GmbH preserve the right to modify and improve the software product described in this document. Specifications and other information contained in this document can change without prior notice. This document does not cover all functions in all possible detail or variations that may be encountered during installation, maintenance and usage of the software. Under no circumstances whatsoever will BÄR Industrie-Elektronik GmbH accept any liability for mistakes in this document or for any sub sequential damage arising from installation or usage of the software. BÄR Industrie-Elektronik GmbH preserves the right to modify or withdraw this document at any time without prior announcement. BÄR Industrie-Elektronik GmbH does not accept any responsibility or liability for the installation, usage, maintenance or support of third party products. Printed in Germany Table of Contents 1 General Information............................................................................................. -

STANDARD FREQUENCIES and TIME SIGNALS (Question ITU-R 106/7) (1992-1994-1995) Rec
Rec. ITU-R TF.768-2 1 SYSTEMS FOR DISSEMINATION AND COMPARISON RECOMMENDATION ITU-R TF.768-2 STANDARD FREQUENCIES AND TIME SIGNALS (Question ITU-R 106/7) (1992-1994-1995) Rec. ITU-R TF.768-2 The ITU Radiocommunication Assembly, considering a) the continuing need in all parts of the world for readily available standard frequency and time reference signals that are internationally coordinated; b) the advantages offered by radio broadcasts of standard time and frequency signals in terms of wide coverage, ease and reliability of reception, achievable level of accuracy as received, and the wide availability of relatively inexpensive receiving equipment; c) that Article 33 of the Radio Regulations (RR) is considering the coordination of the establishment and operation of services of standard-frequency and time-signal dissemination on a worldwide basis; d) that a number of stations are now regularly emitting standard frequencies and time signals in the bands allocated by this Conference and that additional stations provide similar services using other frequency bands; e) that these services operate in accordance with Recommendation ITU-R TF.460 which establishes the internationally coordinated UTC time system; f) that other broadcasts exist which, although designed primarily for other functions such as navigation or communications, emit highly stabilized carrier frequencies and/or precise time signals that can be very useful in time and frequency applications, recommends 1 that, for applications requiring stable and accurate time and frequency reference signals that are traceable to the internationally coordinated UTC system, serious consideration be given to the use of one or more of the broadcast services listed and described in Annex 1; 2 that administrations responsible for the various broadcast services included in Annex 2 make every effort to update the information given whenever changes occur.