Investigation of Black-Starting and Islanding Capabilities of a Battery Energy Storage System Supplying a Microgrid Consisting O
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2018 Nebraska Power Association Load and Capability Report
2018 NEBRASKA POWER ASSOCIATION LOAD AND CAPABILITY REPORT August 2018 1 2 2018 Nebraska Power Association Load and Capability Report Executive Summary In summary, based on existing and committed resources, the statewide deficit occurs after 2037 for the Minimum Obligation as shown in Exhibit 1. The “Minimum Obligation” line is the statewide obligation based on the 50/50 forecast (normal weather) and the minimum 12% reserve margin of the Southwest Power Pool (SPP) Reserve Sharing Pool. The statewide deficit for the Minimum Obligation in the 2017 report showed a State deficit occurring after 2036. Exhibit 2 is the corresponding load and capability data in tabular format. Introduction This report is the Nebraska Power Association (NPA) annual load and capability report, as per Item 3 in the statute below. It provides the sum of Nebraska’s utilities peak demand forecasts and resources over a 20-year period (2018-2037). State Statute (70-1025) Requirement 70-1025. Power supply plan; contents; filing; annual report.(1) The representative organization shall file with the board a coordinated long-range power supply plan containing the following information:(a) The identification of all electric generation plants operating or authorized for construction within the state that have a rated capacity of at least twenty-five thousand kilowatts;(b) The identification of all transmission lines located or authorized for construction within the state that have a rated capacity of at least two hundred thirty kilovolts; and(c) The identification of all -

Ancillary Services Technical Requirements for 2020/21 – 2024/25
SYSTEM OPERATOR Ancillary Services Technical Requirements for 2020/21 – 2024/25 REFERENCE NO. : 342-466 Prepared by: Ike Tshwagong, Marathon Ntusi, Vaughan Smith TITLE REFERENCE REV Ancillary Services Technical Requirements for 342-466 1 2020/21 – 2024/25 PAGE 2 OF 27 TABLE OF CONTENTS 1. INTRODUCTION ............................................................................................................ 5 2. METHODOLOGY ............................................................................................................ 5 3. RESERVES .................................................................................................................... 6 3.1 INTRODUCTION..................................................................................................................... 6 3.2 INSTANTANEOUS RESERVE ................................................................................................ 6 3.2.1 Description ............................................................................................................. 6 3.2.2 Technical Requirements ........................................................................................ 6 3.3 REGULATING RESERVE ....................................................................................................... 8 3.3.1 Description ............................................................................................................. 8 3.3.2 Technical Requirements ........................................................................................ 8 -

Use of Cogeneration in Large Industrial Projects
COGENERATION USE OF COGENERATION IN LARGE INDUSTRIAL PROJECTS (RECENT ADVANCES IN COGENERATION?) PRESENTER: JIM LONEY, PE [email protected] 281-295-7606 COGENERATION • WHAT IS COGENERATION? • Simultaneous generation of electricity and useful thermal energy (steam in most cases) • WHY COGENERATION? • Cogeneration is more efficient • Rankine Cycle – about 40% efficiency • Combined Cycle – about 60% efficiency • Cogeneration – about 87% efficiency • Why doesn’t everyone use only cogeneration? COGENERATION By Heinrich-Böll-Stiftung - https://www.flickr.com/photos/boellstiftung/38359636032, CC BY-SA 2.0, https://commons.wikimedia.org/w/index.php?curid=79343425 COGENERATION GENERATION SYSTEM LOSSES • Rankine Cycle – about 40% efficiency • Steam turbine cycle using fossil fuel • Most of the heat loss is from the STG exhaust • Some heat losses via boiler flue gas • Simple Cycle Gas Turbine– about 40% efficiency • The heat loss is from the gas turbine exhaust • Combined Cycle – about 60% efficiency • Recover the heat from the gas turbine exhaust and run a Rankine cycle • Cogeneration – about 87% efficiency COGENERATION • What is the problem with cogeneration? • Reality Strikes • In order to get to 87% efficiency, the heating load has to closely match the thermal energy left over from the generation of electricity. • Utility electricity demand typically follows a nocturnal/diurnal sine pattern • Steam heating loads follow a summer/winter cycle • With industrial users, electrical and heating loads are typically more stable COGENERATION • What factors determine if cogeneration makes sense? • ECONOMICS! • Not just the economics of the cogeneration unit, but the impact on the entire facility. • Fuel cost • Electricity cost, including stand-by charges • Operational flexibility including turndown ability • Reliability impacts • Possibly the largest influence • If the cogeneration unit has an outage then this may (will?) bring the entire facility down. -

Functional Requirements for Blackstart and Power System Restoration from Wind Power Plants
2nd Int'l Conference on Large-Scale Grid Integration of Renewable Energy in India| New Delhi, India | 4-6 Sep 2019 Functional Requirements for Blackstart and Power System Restoration from Wind Power Plants Anubhav Jain , Jayachandra N. Sakamuri , Kaushik Das , Omer¨ Goksu¨ and Nicolaos A. Cutululis Department of Wind Energy, Technical University of Denmark, Roskilde, Denmark Abstract—In the recent years, the worldwide grid integration per kWh [5]. Moreover, due to onshore space constraints and of renewable energy sources (RES) has grown rapidly. How- poorer wind conditions, large offshore wind power plants ever, the grid-integration of large volume of renewables like (OWPP) with high power WTs have gained popularity and wind and solar, interfaced by power electronics converters, is changing the dynamics of the power system and creating this has led to an increase in the share of offshore wind challenges to maintain reliability, robustness and stability energy [6]. In India, the wind energy share is almost 50% of electricity supply. Morevoer, the stronger inter-linking of of the total grid-interactive RES capacity at present, and in networks poses a greater risk of wide-area blackouts. With terms of meeting its ambitious 2022 targets, wind power is the growing share of wind power in the grid and conventional more than halfway towards its goal [4]. generators being phased out, large offshore wind power plants (OWPP) with state-of-the-art wind turbines (WT) can provide The next section of this paper presents the main factors services of blackstart and power system restoration (PSR) in motivating the need for development of blackstart (BS) the future. -
Generator Black-Start Restoration Using Synchronized Measurement
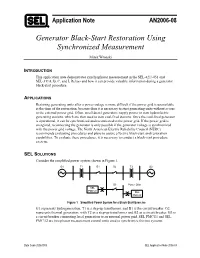
Application Note AN2006-08 Generator Black-Start Restoration Using Synchronized Measurement Mirek Wronski INTRODUCTION This application note demonstrates synchrophasor measurement in the SEL-421/-451 and SEL-311A, B, C, and L Relays and how it can provide valuable information during a generator black-start procedure. APPLICATIONS Restoring generating units after a power outage is more difficult if the power grid is unavailable at the time of the restoration, because then it is necessary to start generating units without access to the external power grid. Often, small diesel generators supply power to start hydroelectric generating stations, which are then used to start coal-fired stations. Once the coal-fired generator is operational, it can be synchronized and reconnected to the power grid. If the power grid is energized, reconnecting the generator is only possible if the generator voltage is synchronized with the power grid voltage. The North American Electric Reliability Council (NERC) recommends evaluating procedures and plans to assure effective black-start and restoration capabilities. To evaluate these procedures, it is necessary to conduct a black-start procedure exercise. SEL SOLUTIONS Consider the simplified power system shown in Figure 1. G1 T1 B1 B2 T2 G2 B3 Power Grid SEL PMCU1 SEL PMCU2 Figure 1 Simplified Power System for a Black-Start Exercise G1 represents hydrogeneration, T1 is a step-up transformer, and B1 is the circuit breaker. G2 represents thermal generation, with T2 as a step-up transformer and B2 as a circuit breaker. B3 is a circuit breaker connecting local generation to an external power grid. SEL PMCU1 and SEL PMCU2 are two phasor measurement control units used to synchronize the two systems. -

Competition and Regulation in the Electricity Supply Industry in South Africa
_________________________________________________________________________________________ 2001 Annual Forum at Misty Hills, Muldersdrift Competition and Regulation in the Electricity Supply Industry in South Africa ___________ Anton Eberhard University Cape Town __________________________________________________________________________________________ 10-12 September, 2001 COMPETITION AND REGULATION IN THE ELECTRICITY SUPPLY INDUSTRY IN SOUTH AFRICA Anton Eberhard Graduate School of Business University of Cape Town 1. The South African electricity supply industry The South African Electricity Supply Industry (ESI) is dominated by a state-owned and vertically integrated utility, Eskom, which ranks seventh in the world in terms of size and electricity sales. It supplies about 96% of South Africa’s electricity requirements which equals more than half of the electricity generated on the African continent. Eskom owns and controls the high voltage transmission grid1 and it supplies about 60% of electricity directly to customers. The remainder of electricity distribution is undertaken by about 240, recently amalgamated, local authorities. The municipal distributors buy bulk electricity from Eskom, with some also generating small amounts for sale in their areas of jurisdiction. A few industries have private generation facilities for their own use, accounting for 2.8% of total electricity produced. Gross Generation Distribution Purchases 190 TWh for End Use End Use 181 TWh 171 TWh Domestic Private 18.0% 2.7% Municipal and Other Distributors Agriculture -

U.S. Electric Company Investment and Innovation in Energy Storage Leading the Way U.S
June 2021 Leading the Way U.S. Electric Company Investment and Innovation in Energy Storage Leading the Way U.S. ELECTRIC COMPANY INVESTMENT AND INNOVATION IN ENERGY STORAGE Table of Contents CASE STUDIES CenterPoint Energy (In alphabetical order by holding company) 14 Solar Plus Storage Project AES Corporation Consolidated Edison Company of New York AES Indiana 15 Commercial Battery Storage 1 Harding Street Station Battery (Beyond Behind-the-Meter) Energy Storage System 16 Gateway Center Mall Battery 17 Ozone Park Battery Alliant Energy Dominion Energy 2 Decorah Energy Storage Project 3 Marshalltown Solar Garden and Storage 18 Bath County Pumped Storage Station 4 Sauk City Microgrid 5 Storage System Solar Demonstration Project DTE Energy 6 Wellman Battery Storage 19 EV Fast Charging-Plus-Storage Pilot Ameren Corporation Duke Energy Ameren Illinois 20 Rock Hill Community 9 MW Battery System 7 Thebes Battery Project 21 Camp Atterbury Microgrid 22 Nabb Battery Site Avangrid New York State Electric & Gas Edison International 8 Aggregated Behind-the-Meter Energy Storage Southern California Edison 9 Distribution Circuit Deployed Battery 23 Alamitos Energy Storage Storage System Pilot Project 24 Ice Bear 25 John S. Eastwood Pumped Storage Plant Rochester Gas & Electric Corporation 26 Mira Loma Substation Battery Storage Project 10 Integrated Electric Vehicle Charging & Battery Storage System Green Mountain Power 11 Peak Shaving Pilot Project 27 Essex Solar and Storage Microgrid 28 Ferrisburgh Solar and Storage Microgrid Berkshire Hathaway Energy 29 Milton Solar and Storage Microgrid MidAmerican Energy Company Hawaiian Electric Companies 12 Knoxville Battery Energy Storage System 30 Schofield Hawaii Public Purpose Microgrid PacifiCorp – Rocky Mountain Power 13 Soleil Lofts Virtual Power Plant i Leading the Way U.S. -

Optimal Black Start Allocation for Power System Restoration
1 Optimal Black Start Allocation for Power System Restoration Georgios Patsakis, Student Member IEEE, Deepak Rajan, Ignacio Aravena, Student Member IEEE, Jennifer Rios, and Shmuel Oren, Life Fellow, IEEE Abstract t —Equipment failures, operator errors, natural disas- pg Active power generation of generator g ∈ G at ters and cyber-attacks can and have caused extended blackouts of time t ∈ T . the electric grid. Even though such events are rare, preparedness pt , qt Active/reactive power flow of branch (ij) ∈ E for them is critical because extended power outages endanger ij ij human lives, compromise national security, or result in economic at time t ∈ T . losses of billions of dollars. Since most of the generating units uBSg Binary variable indicating generator g ∈ G is cannot restart without connecting to an energized grid, the a BS generator. system operator relies on a few units with the ability to start t t t ug, ui, uij Binary variable indicating generator g ∈ G, autonomously, called Black Start (BS) units, to restore the bus i ∈ N, branch (ij) ∈ E energized at time power system. Allocating and maintaining these units is costly and can severely impact the restoration security and time. We t ∈ T (zero indicates not energized). t formulate an optimization problem to optimally allocate BS units vi Voltage magnitude of bus i ∈ N at time t ∈ T . in the grid, while simultaneously optimizing over the restoration PARAMETERS sequence. We extend existing optimal allocation models by including grid considerations such as active power nodal balance, δ, δ Lower/upper bounds for voltage phases. transmission switching, nodal reactive power support and voltage ǫ Trade-off coefficient for line energization. -

Hydropower Plants As Black Start Resources
Hydropower Plants as Black Start Resources May 2019 Jose R. Gracia Patrick W. O’Connor Lawrence C. Markel Rui Shan D. Thomas Rizy Alfonso Tarditi ORNL/SPR-2018/1077 Approved for public release. Distribution is unlimited. Acknowledgments This work was authored by Oak Ridge National Laboratory, managed by UT-Battelle for the US Department of Energy, under contract DE-AC05-00OR22725 and supported by the HydroWIRES Initiative of the Energy Department’s Water Power Technologies Office (WPTO), under contract number DE-AC05-00OR22725. The authors would like to thank Stephen Signore of Oak Ridge National Laboratory for his help in determining the makeup of current black start units in the United States. Additional thanks go to Alejandro Moreno, Samuel Bockenhauer, and Rebecca O’Neil for their thoughtful comments on drafts of the white paper. HydroWIRES The US electricity system is changing rapidly with the large-scale addition of variable renewables, and the flexible capabilities of hydropower (including pumped storage hydropower) make it well-positioned to aid in integrating these variable resources while supporting grid reliability and resilience. Recognizing these challenges and opportunities, WPTO has launched a new initiative known as HydroWIRES: Water Innovation for a Resilient Electricity System. HydroWIRES is principally focused on understanding and supporting the changing role of hydropower in the evolving US electricity system. Through the HydroWIRES initiative, WPTO seeks to understand and drive utilization of the full potential of hydropower resources to contribute to electricity system reliability and resilience, now and into the future. HydroWIRES is distinguished in its close engagement with the US Department of Energy (DOE) national laboratories. -

31. "Control Strategies for Microgrids Black Start and Islanded Operation"
CONTROL STRATEGIES FOR MICROGRIDS BLACK START AND ISLANDED OPERATION J. A. Peças Lopes, C. L. Moreira, F. O. Resende Power Systems Unit INESC Porto – Instituto de Engenharia de Sistemas e Computadores do Porto Rua Dr. Roberto Frias, 378, 4200 – 465 Porto, Portugal Phone (351) 222094230, Fax (351) 222094050 E-mail: [email protected] Keywords: distributed generation; islanded operation; microgrids; microgrids black start; microsources ABSTRACT Dissemination of small size dispersed microgeneration connected to Low Voltage (LV) distribution systems is expected to become an effective mean to face the con- tinuous demand growth in power needs. Under normal operation conditions, the LV distribution system is considered as interconnected with the upstream medium voltage network. However, if a severe disturbance occurs in the medium voltage side, a general blackout can take place. The potentialities of distributed generation can be truly realized if islanded operation is allowed and bottom-up black start functionalities are implemented. In this paper are presented the control strategies to be used in such a system to deal with islanded operation and to exploit the local generation resources as a way to help in power system restoration in case of an emergency situation. A sequence of actions for a black start procedure is identified and it is expected to be an advantage for power system operation in terms of reli- ability as a result from the presence of a very large amount of dispersed generation. The feasibility of the new concepts – islanded operation of small LV distribution systems and LV black start functionalities, up to now only developed for conven- tional power systems – are tested through simulations, being the results described and discussed in this paper. -

Port Rex and Acacia Gas Turbine Stations
PORT REX AND ACACIA GAS TURBINE STATIONS Port Rex and Acacia Gas Turbine Power Stations – “parcels of power” Introduction Port Rex and Acacia are gas turbine stations owned by Eskom and are part of Eskom’s Peaking Generation group of power stations. Port Rex is situated in East London and Acacia on the outskirts of the City of Cape Town. These two gas turbine stations are identical. Port Rex Despite the station being so small, Port Rex is critical for system voltage stability in the Eastern Cape, due to its location at the end of a long transmission line. Long transmission lines have the effect of causing phase changes between the voltage and the current being transported, hence the longer the lines, the more voltage instability occurs. Port Rex has the capability of regulating this voltage instability via an operating mode called synchronous condenser operation. Acacia Situated at the southern end of the Eskom National Grid, Acacia also operates predominantly in the synchronous condenser mode to regulate voltage. In addition, it provides an off-site electrical supply to Koeberg Nuclear Power Station as per the National Nuclear Regulator licensing requirement. Modular industrial gas turbines, such as Port Rex and Acacia, produce up to 40 000 horsepower and are equipped to burn a variety of fuels, ranging from oil to gas. The advantage of the modular design compared to conventional gas turbine design is that routine and planned maintenance is done considerably faster, resulting in higher continuous availability. Role: Improving the security of local power supply is not the only role played by Port Rex and Acacia power stations. -

Restoration of an Active MV Distribution Grid with a Battery ESS: a Real Case Study
sustainability Article Restoration of an Active MV Distribution Grid with a Battery ESS: A Real Case Study Matteo Manganelli 1,*, Mario Nicodemo 1, Luigi D’Orazio 2, Laura Pimpinella 2 and Maria Carmen Falvo 1 1 Department of Astronautical, Electrical and Energy Engineering, Sapienza University of Rome, Rome 00184, Italy; [email protected] (M.N.); [email protected] (M.C.F.) 2 e-distribuzione, Rome 00198, Italy; luigi.d’[email protected] (L.D.); [email protected] (L.P.) * Correspondence: [email protected]; Tel.: +39-06-4458-5809 Received: 26 April 2018; Accepted: 15 June 2018; Published: 17 June 2018 Abstract: In order to improve power system operation, Battery Energy Storage Systems (BESSs) have been installed in high voltage/medium voltage stations by Distribution System Operators (DSOs) around the world. Support for restoration of MV distribution networks after a blackout or HV interruption is among the possible new functionalities of BESSs. With the aim to improve quality of service, the present paper investigates whether a BESS, installed in the HV/MV substation, can improve the restoration process indicators of a distribution grid. As a case study, an actual active distribution network of e-distribuzione, the main Italian DSO, has been explored. The existing network is located in central Italy. It supplies two municipalities of approximately 10,000 inhabitants and includes renewable generation plants. Several configurations are considered, based on: the state of the grid at blackout time; the BESS state of charge; and the involvement of Dispersed Generation (DG) in the restoration process. Three restoration plans (RPs) have been defined, involving the BESS alone, or in coordination with DG.