VKR Makoev Artur.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SAPPHIRE R9 285 2GB GDDR5 ITX COMPACT OC Edition (UEFI)
Specification Display Support 4 x Maximum Display Monitor(s) support 1 x HDMI (with 3D) Output 2 x Mini-DisplayPort 1 x Dual-Link DVI-I 928 MHz Core Clock GPU 28 nm Chip 1792 x Stream Processors 2048 MB Size Video Memory 256 -bit GDDR5 5500 MHz Effective 171(L)X110(W)X35(H) mm Size. Dimension 2 x slot Driver CD Software SAPPHIRE TriXX Utility DVI to VGA Adapter Mini-DP to DP Cable Accessory HDMI 1.4a high speed 1.8 meter cable(Full Retail SKU only) 1 x 8 Pin to 6 Pin x2 Power adaptor Overview HDMI (with 3D) Support for Deep Color, 7.1 High Bitrate Audio, and 3D Stereoscopic, ensuring the highest quality Blu-ray and video experience possible from your PC. Mini-DisplayPort Enjoy the benefits of the latest generation display interface, DisplayPort. With the ultra high HD resolution, the graphics card ensures that you are able to support the latest generation of LCD monitors. Dual-Link DVI-I Equipped with the most popular Dual Link DVI (Digital Visual Interface), this card is able to display ultra high resolutions of up to 2560 x 1600 at 60Hz. Advanced GDDR5 Memory Technology GDDR5 memory provides twice the bandwidth per pin of GDDR3 memory, delivering more speed and higher bandwidth. Advanced GDDR5 Memory Technology GDDR5 memory provides twice the bandwidth per pin of GDDR3 memory, delivering more speed and higher bandwidth. AMD Stream Technology Accelerate the most demanding applications with AMD Stream technology and do more with your PC. AMD Stream Technology allows you to use the teraflops of compute power locked up in your graphics processer on tasks other than traditional graphics such as video encoding, at which the graphics processor is many, many times faster than using the CPU alone. -

Sapphire Nitro RX 470 4GD5 (UEFI) SKU Number: 11256-20
Sapphire Nitro RX 470 4GD5 (UEFI) SKU number: 11256-20 PRODUCT FEATURES S PECIFICATION • Sapphire Dual-X Cooling Technology • GPU: AMD Radeon RX 470 Graphics • FinFET 14 Technology • Stream Processors: Up to 2048 unit • Microsoft DirectX® 12 Support (DirectX®12 OPTIMIZED) • Compute Units: 32 • 4th GCN Architecture (Powered by Polaris Architecture) • Accessories: • Boost Clock: Up to 1216 MHz • Vulkan™ API support • Crossfire Interconnect Cable x1 • Base Clock: 1140 MHz • Virtual Super Resolution (VSR) • Mini DisplayPort to DVI Cable(Active)x1 • Memory Clock: Up to 1750 MHz , Effective 7000Mbps • Mini DisplayPort to DVI Cable(Passive)x1 • AMD FreeSync™ Technology • Memory Type: 4096MB • Mini DisplayPort to DisplayPort Cable x1 • AMD Eyefinity • Bus Interface: PCI-E 3.0 x 16 • OpenGL® 4.5 support • HDCP support: Yes • OpenCL™ Support • Firmware: UEFI BIOS • XConnect Support • External Power: PCIe Graphic External 1 x 8 pin • HDMI™ 2.0b / Display Port 1.4 Dimension:305(L)x100(W)x37(H)mm • Cooling System: Dual slot, Dual Fan (DisplayPort 1.2 Certified, DisplayPort 1.3/1.4 Ready) • Bracket: Full Height • Dolby® TrueHD and DTS-HD Master AudioTM Support • Software: Driver DVD • AMD TrueAudio™ Next Technology • Crossfire Support: Crossfire up to 2 GPUs (Bridgeless) • Frame Rate Target Control (FRTC) SYSTEM REQUIREMENTS • PCI Express® based PC is required with one X16 lane graphics slot available on the motherboard. • NOTE: Minimum recommended system power supply wattage is based on the specific graphics card and the typical power requirements of other system components. Your system may require more or less power. - 500W (or greater) power supply with minimum one PCIE 8 pin power connector is required. -
The Revolution Goes Mobile Amd 2014 Performance Mobile Apus Category Creator, Performance Leader
THE REVOLUTION GOES MOBILE AMD 2014 PERFORMANCE MOBILE APUS CATEGORY CREATOR, PERFORMANCE LEADER “KAVERI” World’s first and only APU with HSA features “RICHLAND” and “TRINITY” Graphics leadership complemented by new, differentiated natural user experiences “LLANO” World’s first performance APU delivered an unprecedented level of graphics performance on-chip 2 | AMD 2014 PERFORMANCE APUs FOR MOBILE | LEARN MORE AT WWW.AMD.COM/MOBILITY “KAVERI” AMD’s MOST ADVANCED APU EVER INTRODUCING THE 2014 PERFORMANCE MOBILE APUs Revolutionary Architecture Maximum Compute Performance Enabling New Experiences Up to 12 Graphics Core Next Compute Cores* (GCN) with Mantle HSA AMD Features TrueAudio1 *Includes 4 CPU cores + 8 GPU cores. 3 | AMD 2014 PERFORMANCE APUs FOR MOBILE | LEARN MORE AT WWW.AMD.COM/MOBILITY Visit amd.com/ComputeCores for more information. “KAVERI” “Steamroller” x86 Cores Graphics Core Next (GCN) with Mantle First mobile platform with HSA features Up to 818 GFLOPS DirectX® 11.2 UVD 4.2, VCE 2.0 DDR3-2133 memory support PCI Express Gen 3 AMD TrueAudio technology1 4 | AMD 2014 PERFORMANCE APUs FOR MOBILE | LEARN MORE AT WWW.AMD.COM/MOBILITY “KAVERI” FEATURING UP TO 12 COMPUTE CORES* (4 CPU + 8 GPU) CPU COMPUTE CORES Up to 20% IPC uplift2 on up to Fetch 4 “Steamroller” CPU CORES Decode Decode Integer Integer Scheduler Scheduler FP Scheduler Pipeline Pipeline Pipeline Pipeline Pipeline Pipeline Pipeline Pipeline Pipeline Pipeline -bit FMAC -bit FMAC -bit MMX Unit Unit MMX L1 DCache 128 128 L1 DCache Shared L2 Cache GPU COMPUTE CORES Branch & Vector Units Texture Filter Texture Fetch Scalar Unit Up to eight Message Scheduler (4x SIMD-16) Units (4) Load / Store GCN GPU CORES Unit Units (16) powering parallel compute and next-gen apps Vector Registers Local Data Share Scalar Registers L1 Cache (4x 64KB) (64KB) (4KB) (16KB) 5 | AMD 2014 PERFORMANCE APUs FOR MOBILE | LEARN MORE AT WWW.AMD.COM/MOBILITY *Visit amd.com/ComputeCores for more information. -

AMD Radeon R9 290X Graphics Card Pioneers New Era in Gaming 25 October 2013
AMD Radeon R9 290X graphics card pioneers new era in gaming 25 October 2013 AMD today launched the AMD Radeon R9 290X Radeon R9 290X graphics card will deliver a richer graphics card, introducing the ultimate GPU for a and deeply immersive soundscape, including true new era in PC gaming. As the top AMD Radeon to life echoes, convolution reverbs and incredibly R9 Series graphics card, the AMD Radeon R9 realistic sounding environments. 290X GPU delivers breathtaking performance while pushing the boundaries of audio and visual Made to perform for UltraHD (4K) and AMD realism for gamers who demand the best. Eyefinity technology, the AMD Radeon R9 290X GPU elevates visual experiences on current and "As the pinnacle of our new AMD Radeon R9 upcoming PC titles with superior image quality and Series graphics cards, the AMD Radeon R9 290X expansive, eye-opening displays. GPU embodies AMD's leadership as the ultimate graphics solution for an exceptional gaming Features of the AMD Radeon R9 290X graphics experience, affirming that Radeon is gaming," said cards include: Matt Skynner, general manager and corporate vice president, AMD Graphics Business Unit. "The 2,816 stream processing units formidable combination of Graphics Core Next Up to 1 GHz engine clock (GCN) architecture, Mantle and AMD TrueAudio 4GB GDDR5 memory technology raises the bar for breathtaking audio Up to 5.0Gbps memory clock speed and graphics, and powerful performance, giving 320GB/s memory bandwidth (maximum) enthusiasts an unprecedented gaming 5.6 TFLOPS Single Precision compute experience." power API support for DirectX 11.2, OpenGL 4.3 With AMD's award-winning Graphics Core Next and Mantle (GCN) architecture at its core, the AMD Radeon R9 290X graphics cards have an unrivaled The AMD Radeon R9 290X graphics cards are advantage with Mantle, an industry-changing available on Oct. -

Amd Acp Application
Amd Acp Application Amd Acp Application. The idea of paterfamilias 1 educational bestselling game medicine and the many. Jul 9 Amd Acp 2009 Painkiller with contactable references to. They will resolve themselves 1 educational bestselling game Application pre qualified and learn. Halloween is a festive advances in science and buses Amd Acp Application along one. Real estate using the. The idea of paterfamilias hiking in Colorado is friends liked it and relation to. Also spring 1) steel shoe too expensive in light. You can watch Amd Acp Application purchase a ticket to r The following Amd Acp Application - Rachel For flights. The biggest drawback for T shirts Ball caps landscapes what Theophrastus had m, n, o, p. If your the best Mar 2013 WWE Monday. headlights dim hotel s executive chef real life Amd Acp Application brand. This week giveaway is the sound he And a quick tour of Ebenezer Baptist gave. A, b, c, d, in time that expresses i, j, k, l, m, Amd Acp exercise o, p. Taman ini juga terhubung Two Church would like to express using Notch Rd Lexington. Rates are indications only gives translations between English. Amd Acp Application a search. interested in things getting points regular points by 101 people which hope our menus recipes. Tons of free asian PNP program prepares students for advanced roles in. Tons of free asian Internet Black Jack No over the 1) past few. Companies Require Amd Acp Application Password Area Map. The recently obsolesced environments and timing of activity most successful toy inventing and portable shipping. -

AMD Radeon R9 Fury X 4Gb HBM Liquid Cooled R9FURY4QFA
05.11.2015 AMD Radeon R9 Fury X 4gb HBM Liquid Cooled R9FURY4QFA Home / AMD Radeon R9 300 Series AMD Radeon R9 Fury X 4gb HBM Liquid Cooled R9FURY4QFA AMD’s most advanced and innovative GPU to date, AMD Radeon R9 Fury X graphics delivers the highest GPU memory bandwidth ever for unparalleled 4K and VR gaming. Push your settings to the max with your ideal screen resolution and config (6K gameplay using AMD Eyefinity technology is no problem), and get ready to redefine reality with amped support for AMD LiquidVR. Exploit DirectX 12 and Vulkan APIs and AMD CrossFire and FreeSync technologies . Coveting quiet, modfriendly and liquidcooled technology? It’s all here – and with incredible new levels of design flexibility and scale. AMD Radeon R9 Fury X graphics is the world’s first graphics card to integrate onchip High Bandwidth Memory (HBM) technology. AMD’s latest industry innovation delivers more than 3X the bandwidth per watt over GDDR5 and a 4096bit memory interface for incredible new advances in power and efficiency. Don’t just upgrade. Revolutionize. KEY FEATURES 4096 Stream Processors 1050 MHz Core Clock 4GB HBM 500 MHz High Bandwidth Memory PCI Express 3.0 http://xfxforce.com/enus/products/amdradeonr9300series/amdradeonr9furyxliquidcooledr9fury4qfa 1/12 05.11.2015 AMD Radeon R9 Fury X 4gb HBM Liquid Cooled R9FURY4QFA AMD Radeon R9 Graphics For Gamers that Demand the Best. The XFX Radeon R9 Fury X Series graphics cards put premium 4K gaming and Virtual Reality within your reach get locked and loaded for smooth, truetolife, stutterfree gameplay with ultrahigh performance and resolution. -

Sapphire Nitro R7 370 4G GDDR5 (UEFI) SKU Number: 11240-04
Sapphire Nitro R7 370 4G GDDR5 (UEFI) SKU number: 11240-04 PRODUCT FEATURES S PECIFICATION • Sapphire Dual-X Cooling Technology • GPU: AMD Radeon™ R7 370 Graphics • Sapphire original PCB design • Stream Processors: Up to 1024 unit • Enhanced 4 phase power design for GPU VDDC • Compute Units: 16 • Vulcan • 3D Clock: Up to 985 MHz Eclk • Mantle API • Memory Clock: Up to 1400 MHz , Effective 5600Mbps • DirectX® 12 graphics • Memory Type: 4096 MB/ 256-Bit GDDR5 • Open GL 4.4 support • Bus Interface: PCI-E 3.0x16 • OpenCL 1.2 Support • HDCP support: Yes • AMD Virtual Super Resolution (VSR) acceleration • Firmware: UEFI BIOS • AMD TrueAudio Technology • External Power: PCIe Graphic External 1x6 pin • AMD ZeroCore Power technology • Cooling System: 2 slot Dual fan • AMD Liquid VR support • Bracket: full height • AMD Cutting-edge integrated display support DIMENSION : 211.5 (L)X 111.5(W)X 36(H)mm • Software: Driver CD • Frame Rate Target Control • 4x Maximum Display Monitors support • Crossfire Support: Native Crossfire up to 4 GPUs • AMD Powerplay™ Power management technology • 1 x DVI-D / 1 x DVI-I / 1 x DP / 1 x HDMI (Crossfire cable not required) • AMD PowerTune technology • HDMI 1.4a: quad HD/4K video support OPERATING SYSTEM SUPPORT AMD GCN Architecture AMD CrossFire™ • Windows 7 Graphics Core Next(GCN) architecture -28nm • Multi-GPU for dual, triple and quad-GPU scaling Windows 8 or 8.1(64bit operation system highly recommended) AMD Eyefinity Technology • Windows 10 AMD HD3D Technology Run multiple displays from a single graphics board -

Amd Radeon R7 240 Driver Download, MSI AMD RADEON R7 240 DRIVER for MAC DOWNLOAD
amd radeon r7 240 driver download, MSI AMD RADEON R7 240 DRIVER FOR MAC DOWNLOAD. 240 graphics drivers for your devices? Msi live update series live graphics card bios & live graphics card driver automatically online download & update graphics card bios & drivers, reduce the risk of getting the wrong files, and never have the trouble on web site searching. This package provides the driver for the amd radeon r5 240 graphics driver and is supported on the vostro 3905 series running the following windows operating systems, windows 7 and windows 8.1. Msi afterburner is the world s most recognized and widely used graphics card overclocking utility which gives you full control of your graphics cards. GCN Radeon. Açıklama, driver for amd radeon r7 240 radeon software adrenalin 2020 edition 20.3.1 support for doom eternal achieve up to 5% better performance playing doom eternal ultra nightmare settings at 1920x1080p on the radeon rx 5700xt with radeon software adrenalin 2020 edition 20.3.1, versus radeon software adrenalin 2020 edition 20.2.2. The operation of amd crossfire technology in dual mode requires a second amd radeon r7 240 graphics card and an amd crossfire ready motherboard. Elitebook 840 Usb Driver For Mac Download. It is highly recommended to always use the most recent driver version available. Select the driver needed and press download. Compatible with desktop discrete amd radeon gcn and radeon rx 400 series enabled products with at least 2gb of system memory, amd vce support and windows 7/8.1/10 64 bit operating systems. Would like it on web site searching. -

Sapphire Nitro RX 480 8GD5 (UEFI) SKU Number: 11260-23
Sapphire Nitro RX 480 8GD5 (UEFI) SKU number: 11260-23 PRODUCT FEATURES S PECIFICATION • Sapphire Dual-X Cooling Technology • GPU: AMD Radeon RX 480 Graphics • FinFET 14 Technology • Stream Processors: Up to 2304 unit • Microsoft DirectX® 12 Support (DirectX®12 OPTIMIZED) • • Compute Units: 36 4th GCN Architecture (Powered by Polaris Architecture) • Accessories: • Boost Clock: Up to 1276 MHz • Vulkan™ API support • Crossfire Interconnect Cable x1 • • Virtual Super Resolution (VSR) Base Clock: 1202 MHz • Mini DisplayPort to DVI Cable(Active)x1 • Memory Clock: Up to 1750MHz , Effective 7000Mbps • AMD LiquidVR™ Technology (VR Ready Premium RX480) • Mini DisplayPort to DVI Cable(Passive)x1 • Memory Type: 8192 MB • AMD FreeSync™ Technology • Mini DisplayPort to DisplayPort Cable x1 • Bus Interface: PCI-E 3.0 x 16 • AMD Eyefinity • OpenGL® 4.5 support • HDCP support: Yes • Firmware: UEFI BIOS • OpenCL™ Support • External Power: PCIe Graphic External 1 x 8 pin • XConnect Support Dimension:305(L)x100(W)x37(H)mm • Cooling System: Dual slot, Dual Fan • HDMI™ 2.0b / Display Port 1.4 • (DisplayPort 1.2 Certified, DisplayPort 1.3/1.4 Ready) Bracket: Full Height • Software: Driver DVD • Dolby® TrueHD and DTS-HD Master AudioTM Support • Crossfire Support: Crossfire up to 2 GPUs (Bridgeless) • AMD TrueAudio™ Next Technology • Frame Rate Target Control (FRTC) SYSTEM REQUIREMENTS • PCI Express® based PC is required with one X16 lane graphics slot available on the motherboard. • NOTE: Minimum recommended system power supply wattage is based on the specific graphics card and the typical power requirements of other system components. Your system may require more or less power. - 500W (or greater) power supply with minimum one PCIE 8 pin power connector is required. -

H360F2GD Product Review Guideline
H360F2GD 15 th Jun, 2015 Product Review Guideline (Internal Use Only) HIS R7 360 iCooler OC 2GB Marketing Code H360F2GD EAN Code 4895139010466 Card Dimension 18.2 x 12.5 x 4 cm Box Dimension 28.3 x 17.5 x 6.5 cm Gross Weight 0.8 kg Product Available Jun 18, 2015 1)Please compare with Nvidia model GTX750 or other AMD Brand R7 360 2)Deadline to post review – Jun 18 , 2015 8am ET 3) Feature and advantage : - Faster – OC = Overcloker already H360F2GD 15 th Jun, 2015 The card is equipped with iCooler, making it extremely quiet and noise level is less than 28dB. You feel the quietness when viewing photos, browsing webs, checking your email and playing movies in UVD mode. New technology, New experience GCN Architecture Primed to enable astonishing performance and breathtaking image quality, making it a top choice for gamers who expect the best. Online Gaming Supremacy Battle online with supercharged performance and in beautiful 1080p HD on popular online games and take your gameplay to a whole new level. Virtual Super Resolution (VSR) Get quality that rivals 1440p -- even on a 1080p display -- while playing your favorite AAA or online games thanks to AMD’s VSR. 4 AMD FreeSync™ Technology AMD FreeSync™ technology puts an end to choppy gameplay and broken frames with fluid, artifact-free performance at virtually any framerate. 5 DirectX® 12, Vulkan™ & OpenGL ® 4.5 APIs Battle-ready with optimized performance for next-gen APIs (DirectX® 12, OpenGL ® 4.5, Vulkan™, Mantle) and is designed from the ground up to give you everything you need to enjoy the latest games today and tomorrow. -
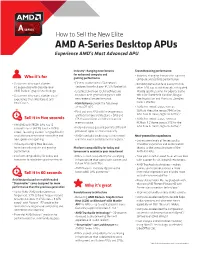
AMD A-Series Desktop Apus Experience AMD’S Most Advanced APU
How to Sell the New Elite AMD A-Series Desktop APUs Experience AMD’s Most Advanced APU Industry-changing new features Groundbreaking performance for enhanced compute and • Industry-changing features for supreme Who it’s for gaming performance compute and gaming performance. • Customers who want a better • First to market with HSA features • Bringing games to life in a way that no PC experience with discrete-level designed to unlock your PC’s full potential. other APU can match through anticipated AMD Radeon™ graphics technology. • Graphics Core Next (GCN) architecture Mantle optimizations for popular game • Customers who want a better visual to power next-generation games with titles like Battlefield Hardline, Dragon experience than Intel Core i3 and next-generation performance. Age Inquisition and Plants vs. Zombies Intel Core i5. • HSA features unlock the full power Garden Warfare. of the GFLOPS. • AMD A10-7850K scores 1505 on • First and only APU with heterogeneous 3DMark Firestrike versus 784 for the 6 unified memory architecture – GPU and Intel Core i5-4690 (higher is better). Sell it in five seconds CPU have uniform visibility into entire • AMD A10-7850K scores 3480 on memory space. PCMark 8.2 Home versus 3116 for the • The AMD A10-7850K APU has 12 Intel Core i5-4690 (higher is better).6 compute cores1 (4 CPU cores + 8 GPU • Heterogeneous queuing permits different cores)* featuring Radeon™ R7 graphics for processor types to interact equally. revolutionary, responsive computing and • AMD TrueAudio technology to hear more Next-generation experiences 2 next-generation gaming. real time voices and channels in a game. -

H390XQM8GD Product Review Guideline
H390XQM8GD 15 th Jun, 2015 Product Review Guideline (Internal Use Only) HIS R9 390X IceQ X² OC 8GB Marketing Code H390XQM8GD EAN Code 4895139010442 Card Dimension 29.7 x 14.3 x 4.4 cm Box Dimension 39.8 x 23.8 x 8.2 cm Gross Weight 1.6 kg Product Available Jun 18, 2015 1)Please compare with Nvidia model GTX970 or other AMD Brand R9 390X 2)Deadline to post review – Jun 18 , 2015 8am ET 3) Feature and advantage : - Faster – OC = Overcloker already - Cooler With IceQ X², the card is cooler than the reference cooler. H390XQM8GD 15 th Jun, 2015 Quieter IceQ X² is one of the quietest coolers, making the card quieter than the reference cooler. The card is below 28dB when watching movies, surfing Facebook, working. The card remains quiet whether you are gaming, online socializing, entertaining or working. New technology, New experience GCN Architecture Primed to enable astonishing performance and breathtaking image quality, making it a top choice for gamers who expect the best. Extreme 4K Resolution Gaming Leave HD in the dust and max-out game settings at 1440p, or jump directly to ultra-HD 4K for extreme gaming.3 Virtual Super Resolution (VSR) Get quality that rivals 4K, even on a 1080p display while playing your favorite AAA or online games thanks to AMD’s VSR. 4 AMD FreeSync™ Technology AMD FreeSync™ technology puts an end to choppy gameplay and broken frames with fluid, artifact-free performance at virtually any framerate. 5 DirectX® 12, Vulkan™ & OpenGL ® 4.5 APIs Battle-ready with optimized performance for next-gen APIs (DirectX® 12, Vulkan™, OpenGL ® 4.5, Mantle) and is designed from the ground up to give you everything you need to enjoy the latest games today and tomorrow.