Development of a Decision Support System for the Design and Adjustment of Sailboat Rigging
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2020 Ecsa Phrf Regulations
2020 ECSA PHRF REGULATIONS These repairs and improvements have the potential to affect boat speed when compared to the base Performance Handicap Racing Fleet of the boat upon which the rating is established. It is the Eastern Connecticut Sailing Association same for newer boats that are modified. For this reason, modifications and significant repairs made to I. GENERAL REGULATIONS any boat need to be documented and evaluated, and ECSA Handicap ratings are determined for each boat rating adjustments considered on a case-by-case as the sum of its base boat rating and any basis to maintain fair racing for all. All restorations, adjustments applied that address modifications to repairs and modifications described below and listed the standard boat, its sail plan, spars, propulsion, in Section XI of these Regulations, whether etc. as outlined in this document. Base boat ratings performed by you, others or previous owners, must are established based on performance potential and be reported and noted on your PHRF application observation in accordance with the design of a whether or not they replicate the original design. standard boat, equipped as intended by the original Modifications of interest typically include changes to manufacturer with US Coast Guard required safety the hull shape or structure, appendages, spars or equipment, maintained in top racing condition and sail plan, boat weight or propulsion. While some sailed by competent crew. It is the aim of these modifications may be allowable under One-Design regulations to equitably assign handicaps, as Time class rules where all boats are the same, they may Correction Factors, for conditions likely to be found require a rating adjustment for racing under PHRF. -
The Sailing Magazine for the Rest of Us
The sailing magazine for the rest of us. 10 00 00 $8 (Canada $8 CDN) 10 0 62825 97035 7 goodoldboat.com Issue 128 September/October 2019 Automatic/Manual Inflatable PFD USCG Approved Type V with Type II Performance! Full 35 lbs buoyancy! Comfortable, low profile, with wide neoprene neckline. Universal sizing, fits 30"-65" chest. Hi-Vis inflation chamber. Durable 400 denier nylon. Super bright retro-reflective areas on front and a high-visibility BEACON logo on the back. H Reg 179.99 HAMILTON SAVE $ 99 $30 NEW! 149 ea Pre-order MARINE Part# Color Order# ™ HMI-BCNI35OG Orange/Gray 773536 today! HMI-BCNI35BG Blue/Light Gray 773535 BOATERS' STORE! Moisture Absorber Dries air in cabins, lockers, closets, rooms, basements and other enclosed State-of-the-art line areas. Super-dry concentrated pellet of premium coatings, formula absorbs up to 50% more adhesives and putties. moisture than flake formulas. Search# SYT- $ 29 7 ea MK-6912 Order# 144114 Hamilton Wayne Photo by Tea Tree Power® Mold & Mildew Eliminator Non-toxic, bio-degradable. Blended from 100% Australian tea tree oil. Available in gel or spray. Tarps Starting At • Lightweight Blue 3 GRADES, $ 99 • Premium White 27 SIZES! 17 ea • Super Heavy Duty Silver HAMILTON Search# FOR-77020 Search# STT- Premium 7 Mil. White Oil Absorbent Sheets Shrink Wrap Each 15" x 19" sheet CAN HELP! absorbs 13 to 25 times Some sizes are available its weight in oil, fuel Many Hamilton Marine employees maintain in clear and blue. Shrink and other hydrocar- their own boats. And there is no better teacher wrap accessories are also bons. -
Melges 15 Speed Guide Before Stepping the Mast
MELGES 15 SPEED GUIDE Updated August 19, 2020 Racing sailboats is much different from the other sporting events. Sailing requires tuning for different wind and water conditions. Many of these tuning adjustments are small, yet critical. We have outlined the following tuning information for the Melges 15. The measurements achieved have been tested through countless hours on the water in a variety of conditions. What is truly unique with this guide is that we have simplified the tuning process in order to make the process easy for Melges sailors. You will be able to achieve newfound speed in your Melges 15 after following these simple steps. Melges will continue to bring you the very best in sailing service and technology. Additional resources can be found in our how-to videos and articles available on Melges.com. Our objective is to allow you to set the pace in your racing class. Melges 15 Rigging Tutorial: https://youtu.be/BdogJjXHcm0 BEFORE STEPPING THE MAST 1. Clean and lubricate turnbuckles, make sure that the top and bottom threaded studs are even in the turnbuckle tube. Make sure that your turnbuckles are loose with a ½ inch of thread showing on each end of the turnbuckle. 2. Position mast so that base is next to the mast step on deck and top end is resting in the boom rest support or on the transom of your boat. You can step the mast alone or with a helper holding the base of the mast. 3. Check all pins, wires and fittings for wear. Plug in the side stays. -
SAVE This File to Your Computer. This Is the Definitions and Form Required
PHRF OF E.L.I. THE PERFORMANCE HANDICAP RACING FLEET OF EASTERN LONG ISLAND POST OFFICE BOX 82, NEW SUFFOLK, NEW YORK 11956 April, 2014SAVE this file to your Computer. Dear Fellow Sailor, This is the definitions and form required to apply for a Enclosed with this letter you will find an application form to renew your membership In theWhitebread Performance Handicap 23 Day Racing Rating Fleet of Eastern. Long Island and receive your 2014 PHRF/ELI handicap rating. Most handicap racing at the club level as well as theThere handicap is racing NO program FEE coordinated. by the Eastern Long Island Yachting Association utilize these ratings. So, if you plan to compete this year, please reviewWhen the enclosed complet material, efill outand the application blank and return BEFOREit with your fee asdoing soon as possible.your ON-LINERemember that ENTRY all rating certificates are only valid for one year and automatically expire on April 30 of the following year. Even if you held a eithercertificate lastemail year, it itmust to: be renewed for your rating to be valid for the upcoming season. In addition to a renewal [email protected] application form, this letter also contains general information regarding the process by which ratings are generated, the rating appealswith process,your andNAME, the extent BOAT of your responsibilities NAME, DAY as an owner RATING or master. A summary of the definitions used in the rating process as well as the Rating Adjustment Tables usedin to adjustthe basesubject boat ratings line are included on a separate sheet. OR The full content of this packagemail is also itavailable to: online and can be downloaded from the ELIYA website, elisail.org. -

PHRF-NB Rules
PHRF-NB Regulations 2020 1. Preface PHRF-NB strives to consistently provide fair ratings for dissimilar boats to race against each other. The best use of these ratings is done by grouping boats in the smallest rating band with like type boats. It is expected that all designs will have preferred conditions and may excel when those are met. The challenge we face is to balance the rating to the local predominate condition in an effort to have the best sailed and prepared boats finish in the top third. The Rating Committee (RC) reviews race results on a regular basis. This is typically done with at least a years’ worth of results for a boat type to determine whether ratings need to be adjusted. 2. Administration PHRF performance handicaps are boat performance handicaps based on the speed potential of the boat determined, as far as possible, by observations of race results, VPP data, and ratings from other Rating Systems. The intent of PHRF handicapping is that any well-equipped, well-maintained and well-sailed boat has a good chance to win; and any boat that wins a PHRF race is indeed well-equipped, well-maintained, and well- sailed. Handicaps are adjusted, as needed, on the basis of the boat's performance so that each boat will have an equal opportunity to win. This is the fundamental concept. PHRF-NB ratings are set by the RC. The RC reviews boat data, race results and boat modifications to name a few to determine a boats rating. We will initially set a boats ‘base handicap’ and then apply adjustments for modifications. -

Handicap Adjustments the Following Are Adjustments That PHRF NE Normally Makes to a Base Boat for Non-Standard Equipment
Handicap Adjustments The following are adjustments that PHRF NE normally makes to a base boat for non-standard equipment. Base Boat Definition of a Base Boat: Will include all specifications per the manufacturer, including: o A genoa not to exceed 155% (unless a small jib is standard) o Spinnaker/whisker pole not to exceed the length of J. o Spinnaker mid girth not to exceed 1.8 X J. o Spinnaker hoist to be per manufacturers specifications. o Propeller capable of driving the boat at a minimum of the square root of the waterline length in knots. ▪ Folding or feathering with exposed shaft or sail drive ▪ 2 blade solid if prop is in aperture ▪ Outboard o IMS sail definitions apply, unless boat is custom, one design or the manufacturer specifies different. The following is a list of adjustments that will be made to a boat’s base rating for variations to the Base Boat. Auxiliary Power Adjust (SPM) • Exposed shaft • 2 blade solid prop +6 • 3 blade solid prop +9 • 4 blade solid prop +12 • In aperture 3 blade solid prop +3 • 4 blade solid prop +6 • 2 blade feathering or folding prop 0 • 3 blade feathering or folding prop 0 • Outboard fixed in down position +6 • Inboard w/shaft & folding prop replacing outboard +6 • Inboard with exposed shaft in place of outboard -6 • Bow thruster, not retracting +3 LP Adjustment LP of genoa o 155.1 - 160% -3 160.1 – 170% - 6 Every additional 10% increase -3 Self-tacking jib system non-standard equipment +3 Bloopers are considered headsails Spinnaker Adjustments • Pole length (JC) and/or spinnaker mid-girth -3 -
Sun Odyssey 410 a NEW VISION of LIFE on BOARD SUMMARY
Sun Odyssey 410 A NEW VISION OF LIFE ON BOARD SUMMARY SUN ODYSSEY 410 SPECIFICATIONS GENERAL CONCEPT KEY POINTS EXTERIOR INTERIORS TECHNICAL EQUIPMENT PACKS SAILS CONSTRUCTION UPHOLSTERY OPTIONS ELECTRONIC PACKAGES SUN ODYSSEY 410 2/59 Cabins 2 / 3 Performance TECHNICAL SPECIFICATION Berths 4 / 6 + 2 mainsail area 46.7 m² / 503 Sq ft Engine power Yanmar 40 Hp / 29 kW Performance Overall length with bowsprit 12.95 m / 42'5" Fuel capacity 200 l / 53 US gal genoa area 38.6 m² / 415 Sq ft Overall length 12.35 m / 40'6" Water capacity 330 + 200 l / 87 + 53 US gal Furling mainsail Hull Beam 3.99 m / 13'1" Cold capacity 190 l / 50 US gal area 31 m² / 334 Sq ft Waterline length 11.71 m / 38'5" Holding tank capacity 80 l / 21 US gal Self-tacking Jib Overall Beam 3.99 m / 13'1" Mainsail area 43.6 m² / 469 Sq ft area 30.15 m² / 325 Sq ft Displacement - Deep draft keel 7900 kg / 17417 Lbs Foresail area 38.6 m² / 415 Sq ft Code 0 area 81.85 m² / 881 Sq ft Standard Draft 2.14 m / 7'0" 2 cabins: A6 / B7 / C9 / D9 / 3 cabins: Shoal draft 1.6 m / 5'2" CE category A8 / B9 / C10 / D10 Marc Lombard / Piaton Yacht Design Architect / Jeanneau Design * Optional equipment ** Mid-load speed, clean hull without antifouling SUN ODYSSEY 410 GENERAL CONCEPT 3/59 INTRODUCTION A NEW VISION OF LIFE ON BOARD Designed by naval architect Marc Lombard, with the contribution of designer Jean-Marc Piaton, the new line of Sun Odysseys successfully meets the challenge of incorporating contemporary features into a harmonious design. -

ORR Rulebook Provides Details About Measurement, Rule Restrictions, Ratings and the Requirements to Race Under ORR
2018 OFFSHORE RACING RULE (ORR™) A Handicap Rating System for Offshore Boats Published by the Offshore Racing Association www.offshoreraceracingrule.org ORR OWNER’S QUICK START GUIDE* (*The Quick Start Guide is meant to be used as a help guide for owners and for informational purposes only: it is not to be considered part of the ORR Rule Book). Brief The Offshore Racing Rule (ORR) is owned and administered by the Offshore Racing Association (ORA). The ORA is the Rule Authority. The ORR predicts relative time allowances between boats to permit boats of different sizes, types and ages to compete with the fairest ratings possible. The ORR is an objective rule. Its ratings are based on the measurement of the speed-related features of sailboats and on the use of the ORR Velocity Prediction Program (VPP) that then calculates the speed potential of each boat at any combination of wind speed and course direction by assessing the measured data. The ORR VPP is a set of algorithms developed through the latest specific fundamental scientific research for its ongoing development. ORR is intended to be a non-type forming measurement rule that fairly rates properly designed and prepared boats which are equipped for offshore racing. It must be clearly understood by all who use the ORR that it is not a development rule and therefore is not intended for sailors who are looking to “beat” the rule. In order to discourage attempts to design boats “to the rule”, the algorithms of the VPP are non-public and only limited access is allowed for trial certificates. -
Quick Reference Asymmetrical SMG04-06 V2
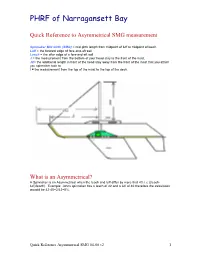
PHRF of Narragansett Bay Quick Reference to Asymmetrical SMG measurement Spinnaker Mid Girth (SMG) = mid girth length from midpoint of luff to midpoint of leech. Luff = the forward edge of fore-and-aft sail Leach = the after edge of a fore-and-aft sail J = the measurement from the bottom of your head stay to the front of the mast. JC= the additional length in front of the head stay away from the front of the mast that you attach you spinnaker tack to. I = the measurement from the top of the mast to the top of the deck. What is an Asymmetrical? A Spinnaker is an Asymmetrical when the leach and luff differ by more that 4% i.e ((leach- luff)/leach). Example: Johns spinnaker has a leach of 42 and a luff of 40 therefore the calculation wouold be 42-40=2/42=5%. Quick Reference Asymmetrical SMG 04-06 v2 1 PHRF of Narragansett Bay How do I determine the Spinnaker Mid Girth? For this measurement, pull the sail tight enough to pull the wrinkles out but not tight enough to stretch the sail. The measurements are supposed to be taken from the theoretical middle of the sail, but sometimes that’s impractical. Just give it your best, honest effort. Although it helps to have a large room to spread the sail out, this can be done in a wreck room, long hallway, or front yard. The process is easy to break up into manageable steps. Steps Directions Visual Spreading out Spread out sail flat and hold down sail the three ends. -

Uk Sailmakers Cruising Asymmetrical Spinnaker
UK SAILMAKERS CRUISING ASYMMETRICAL SPINNAKER When the breeze lightens, UK Sailmakers’ asymmetrical pole-less cruising spinnaker is the ideal sail to keep you moving downwind. It de- livers almost as much pulling power as a spinnaker, yet it’s so simple, easy to set, trim and lower that it can be handled by one person. Our cruising spinnaker makes offwind sailing faster and more fun, es- pecially when compared to motoring downwind with your sails flapping. Our cruising spinnaker gives you the power of a spinnaker, the simplic- ity of a genoa, and the pleasure of sailing in peace and quiet. As with any spinnaker, you can make a creative statement when designing a color scheme for your cruising chute. Have fun with our online coloring tools or ask about having a logo or picture printed right on the sail. CRUISE WITH CONFIDENCE uksailmakers.com 28 Knots AWS 21 Knots AWS 45° AWA 45° AWA Knots A 14 WS nots AW 7 K S Code Zero 90° AWA A1 90° AWA A3 A2 A5 Cruising Spinnaker 135° AWA 180° AWA 135° AWA A4 The UK Sailmakers cruising spinna- Stasher captures and controls the sail, allow- ker doesn’t require extra gear, so you ing safe and comfortable maneuvers, even for don’t need a spinnaker pole, mast track, shorthanded crews. Alternatively, thanks to pole lift, foreguys and afterguys. All that’s recent developments in free-luff furling sys- needed is a spinnaker halyard, two sheets tems, the chute can be rolled up, just like a and two turning blocks. furling jib. -

Figaro Bénéteau 3
Figaro Bénéteau 3 General Equipment list - Europe GENERAL SPECIFICATIONS________________________ • L.O.A 10,89m 35’9’’ • Hull length 9,75m 32’ • L.W.L. 9,46m 31’ • Beam 3,48m 11’5’’ • Draught 2,50m 8’2’’ • Ballast weight 1 111kg 2,449 lbs • Air draft 15,22m 49’11’’ • Light displacement 3 175kg 7,000 lbs • Fuel capacity 40L 11 US Gal • Nanni Diesel N3 engine 21 HP 21 HP ARCHITECTS / DESIGNERS ________________________ • Naval Architect: VPLP design • Outside & interior design: VPLP design EC CERTIFICATION _______________________________ • Category A - 3 people • Category B - 4 people • Category C - 6 people STANDARD SAILS DIMENSIONS ____________________ • Square top mainsail 40,9m² 440 sq/ft • J2 31,9m² 343 sq/ft • J3 25,7m² 277 sq/ft • Gennaker 59,2m² 637 sq/ft • Asymmetric spinnaker A2 121m² 1,302 sq/ft • Asymmetric spinnaker A4 80,6m² 868 sq/ft •I 12,17m 39’11’’ •J 4,54m 14’11’’ •P 12,65m 41’6’’ •E 4,33m 14’2’’ June 30, 2021 - (non-binding document) Code Bénéteau V12711 (D) Eng Figaro Bénéteau 3 General Equipment list - Europe STANDARD EQUIPMENT DECK EQUIPMENT________________________________ CONSTRUCTION _________________________________ RIGGING • Carbon mast HM40 placed on deck HULL • 2 Aft swept spreaders • Polyester sandwich - Infused PVC foam • Glued Antal track • Infused PVC foam structure with the hull • Dyform forestay, rod shrouds • Adjustment of double running backstays by 2:1 tackle with return on DECK each side • Polyester sandwich - Infused PVC foam • Black anodised aluminum boom • Infused PVC foam structure with the deck -
Asymmetrical Trim Guide
ASYMMETRICAL TRIM GUIDE The fundamental principals of asymmetrical trim are outlined in this guide. For more detailed information, contact a Quantum Sails Consultant. WHAT MAKES AN ASYMMETRICAL SPINNAKER DIFFERENT FROM A STANDARD SPINNAKER? First, geometry. An Asymmetrical has a distinct luff and leech. The tack is always the tack, and both sheets are tied onto the same corner (clew), just like a genoa. Second, the cross-sectional shaping is asymmetrical, not uniform or semi- ASYMMETRICAL DEFINED circular as it is with a symmetrical spinnaker. The position of maximum camber or draft is likely to be forward of 50 percent. SF: Spinnaker Foot An asymmetrical spinnaker typically has a rounder entry (luff) SLU: Spinnaker Luff Length and flatter exit (leech). In general, these spinnakers are better SLE: Spinnaker Leech Length reaching sails than conventional symmetrical spinnakers, SMG: Spinnaker Median Girth though they can be designed for sailing at broad angles. AT WHAT WIND ANGLES CAN AN ASYMMETRICAL SPINNAKER BE CARRIED? This is a function of design, materials, construction, and, a spinnaker pole, and the ability to pull the tack-to-weather out ultimately, breeze velocity. The flatter, more genoa-like, and from behind the mainsail, pays off. Like all spinnakers in more wind, asymmetrical the spinnaker is, the closer to the wind it can be asymmetrical spinnakers stay full and pressurized at broader and carried. More symmetrical, spinnaker-like shapes are used broader angles. in larger, fuller sails to optimize them for broad reaching and running. The trick is to strike the right balance for the intended QUANTUM MAKES THREE BASIC ASYMMETRICAL SPINNAKER usage or to have several asymmetrical spinnakers with different DESIGNS FOR CRUISING: purposes.