Equilibrium and Stability of Tokamak Plasmas with Arbitrary Flow By
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Laboratory Astrophysics with Lasers Chantal Stehlé
Laboratory Astrophysics with lasers Chantal Stehlé LERMA (Laboratoire d’Etudes de la Ma4ère et du Rayonnement en Astrophysique et Atmosphères) This work is partly supported by French state funds managed by the ANR within the InvesBssements d'Avenir programme under reference ANR-11-IDEX-0004-02. Plasma astrophysics see for instance Savin et al. « Lab astro white paper », 2010 Perimeter Methods • Microscopic physical • Experiments processes (opacity, EOS) • Theory, databases • • MulBscale, mulphysics Numerical simulaons • Links to observaons processes (e.g. magne4c reconnecon, shock waves, instabili4es …) Tools • Study of large scale scaled • Medium size lab. processes, (e.g. stellar jets) experiments • Large scale faciliBes (lasers and pinches ) • Super-compung ressources OUTLINE • IntroducBon • Stellar Opacity • EOS for gazeous planets • Scaling • Accreon & Ejecon processes in Young Stars • Conclusion Opacity for stellar interiors From Turck Chièze et al. ApSS 2010 4 Opacity An example of opacity : For a optically thick medium, Hydrogen( Stehlé et al 1993) • LTE is ~ valid -> near blackbody radiaon κν/ρ • The monochromac radiave flux Fν ! is proporBonal to the gradient of rad. Energy and to 1/κν (The radia4on tends to escape from regions where κν is low, ie between lines) hν • The frequency averaged flux <F> is linked to the Rosseland opacity κR. 1 3 dν dB (T) / dT 16 σ T dT 1 ∫ κ ν < F > = and = ν d dB (T) / dT 3 κ R dz κ R ∫ ν ν 5 CEPHEIDS: the enigma Strong periodic (P~ 1 – 50 days) Rela4on P-L : variaons of luminosity L, Teff, and distance calibrator radius. Enveloppe 2 The pulsaon (κ mechanism) log(κR in g/cm ) 2 • in the external part of the stellar envelope 1.5 • linked to an increase of the opacity 1 4 6 -7 -2 3 0.5 10 < T < 10 K (10 < ρ < 10 g/cm ) 0 Hence radiaon is blocked in the internal layers, -> heang -> expansion and beang Core 34 32 30 28 log(External Mass in g ) 2 In the 90’, no code was able Temperature in K, κ in cm /g for M* = 5 M8, Y=0.25, Z=0.08, to reproduce the pulsa6on. -
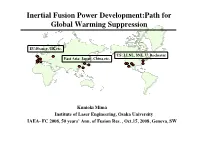
Inertial Fusion Power Development:Path for Global Warming Suppression
Inertial Fusion Power Development:Path for Global Warming Suppression EU:France, UK,etc. US: LLNL, SNL, U. Rochester East Asia: Japan, China,etc. Kunioki Mima Institute of Laser Engineering, Osaka University IAEA- FC 2008, 50 years’ Ann. of Fusion Res. , Oct.15, 2008, Geneva, SW Outline • Brief introduction and history of IFE research • Frontier of IFE researches Indirect driven ignition by NIF/LMJ Ignition equivalent experiments for fast ignition • IF reactor concept and road map toward power plant IFE concepts Several concepts have been explored in IFE. Driver Irradiation Ignition Laser Direct Central hot spark Ignition HIB Indirect Fast ignition Impact ignition Pulse power Shock ignition The key issue of IFE is implosion physics which has progressed for more than 30 years Producing 1000times solid density and 108 degree temperature plasmas Plasma instabilities R Irradiation non-uniformities Thermal transport and ablation surface of fuel pellet ΔR R-M Instability ΔR0 R-T instability R0 R Feed through R-M and R-T Instabilities in deceleration phase Turbulent Mixing Canter of fuel pellet t Major Laser Fusion Facilities in the World NIF, LLNL, US. LMJ, CESTA, Bordeaux, France SG-III, Menyang,CAEP, China GXII-FIREX, ILE, Osaka, Japan OMEGA-EP, LLE, Rochester, US HiPER, RAL, UK Heavy Ion Beam Fusion: The advanced T-lean fusion fuel reactor Test Stand at LBNL NDCX-I US HIF Science Virtual National Lab.(LBNL, LLNL,PPPL) has been established in 1990. (Directed by G Logan) • Implosion physics by HIB • HIB accelerator technology for 1kA, 1GeV, 1mm2 beam: Beam brightness, Neutralization, NDCX II Collective effects of high current beam, Stripping.(R.Davidson etal) • Reactor concept with Flibe liquid jet wall (R.Moir: HYLIF for HIF Reactor) History of IFE Research 1960: Laser innovation (Maiman) 1972: Implosion concept (J. -

Analysis of Equilibrium and Topology of Tokamak Plasmas
ANALYSIS OF EQUILIBRIUM AND TOPOLOGY OF TOKAMAK PLASMAS Boudewijn Philip van Millig ANALYSIS OF EQUILIBRIUM AND TOPOLOGY OF TOKAMAK PLASMAS BOUDEWHN PHILIP VAN MILUGEN Cover picture: Frequency analysis of the signal of a magnetic pick-up coil. Frequency increases upward and time increases towards the right. Bright colours indicate high spectral power. An MHD mode is seen whose frequency decreases prior to a disruption (see Chapter 5). II ANALYSIS OF EQUILIBRIUM AND TOPOLOGY OF TOKAMAK PLASMAS ANALYSE VAN EVENWICHT EN TOPOLOGIE VAN TOKAMAK PLASMAS (MET EEN SAMENVATTING IN HET NEDERLANDS) PROEFSCHRIFT TER VERKRUGING VAN DE GRAAD VAN DOCTOR IN DE WISKUNDE EN NATUURWETENSCHAPPEN AAN DE RUKSUNIVERSITEIT TE UTRECHT, OP GEZAG VAN DE RECTOR MAGNIFICUS PROF. DR. J.A. VAN GINKEL, VOLGENS BESLUTT VAN HET COLLEGE VAN DECANEN IN HET OPENBAAR TE VERDEDIGEN OP WOENSDAG 20 NOVEMBER 1991 DES NAMIDDAGS TE 2.30 UUR DOOR BOUDEWUN PHILIP VAN MILLIGEN GEBOREN OP 25 AUGUSTUS 1964 TE VUGHT DRUKKERU ELINKWIJK - UTRECHT m PROMOTOR: PROF. DR. F.C. SCHULLER CO-PROMOTOR: DR. N.J. LOPES CARDOZO The work described in this thesis was performed as part of the research programme of the 'Stichting voor Fundamenteel Onderzoek der Materie' (FOM) with financial support from the 'Nederlandse Organisatie voor Wetenschappelijk Onderzoek' (NWO) and EURATOM, and was carried out at the FOM-Instituut voor Plasmafysica te Nieuwegein, the Max-Planck-Institut fur Plasmaphysik, Garching bei Munchen, Deutschland, and the JET Joint Undertaking, Abingdon, United Kingdom. IV iEstos Bretones -

Formation of Hot, Stable, Long-Lived Field-Reversed Configuration Plasmas on the C-2W Device
IOP Nuclear Fusion International Atomic Energy Agency Nuclear Fusion Nucl. Fusion Nucl. Fusion 59 (2019) 112009 (16pp) https://doi.org/10.1088/1741-4326/ab0be9 59 Formation of hot, stable, long-lived 2019 field-reversed configuration plasmas © 2019 IAEA, Vienna on the C-2W device NUFUAU H. Gota1 , M.W. Binderbauer1 , T. Tajima1, S. Putvinski1, M. Tuszewski1, 1 1 1 1 112009 B.H. Deng , S.A. Dettrick , D.K. Gupta , S. Korepanov , R.M. Magee1 , T. Roche1 , J.A. Romero1 , A. Smirnov1, V. Sokolov1, Y. Song1, L.C. Steinhauer1 , M.C. Thompson1 , E. Trask1 , A.D. Van H. Gota et al Drie1, X. Yang1, P. Yushmanov1, K. Zhai1 , I. Allfrey1, R. Andow1, E. Barraza1, M. Beall1 , N.G. Bolte1 , E. Bomgardner1, F. Ceccherini1, A. Chirumamilla1, R. Clary1, T. DeHaas1, J.D. Douglass1, A.M. DuBois1 , A. Dunaevsky1, D. Fallah1, P. Feng1, C. Finucane1, D.P. Fulton1, L. Galeotti1, K. Galvin1, E.M. Granstedt1 , M.E. Griswold1, U. Guerrero1, S. Gupta1, Printed in the UK K. Hubbard1, I. Isakov1, J.S. Kinley1, A. Korepanov1, S. Krause1, C.K. Lau1 , H. Leinweber1, J. Leuenberger1, D. Lieurance1, M. Madrid1, NF D. Madura1, T. Matsumoto1, V. Matvienko1, M. Meekins1, R. Mendoza1, R. Michel1, Y. Mok1, M. Morehouse1, M. Nations1 , A. Necas1, 1 1 1 1 1 10.1088/1741-4326/ab0be9 M. Onofri , D. Osin , A. Ottaviano , E. Parke , T.M. Schindler , J.H. Schroeder1, L. Sevier1, D. Sheftman1 , A. Sibley1, M. Signorelli1, R.J. Smith1 , M. Slepchenkov1, G. Snitchler1, J.B. Titus1, J. Ufnal1, Paper T. Valentine1, W. Waggoner1, J.K. Walters1, C. -

Plasma Stability and the Bohr - Van Leeuwen Theorem
NASA TECHNICAL NOTE -I m 0 I iii I nE' n z c * v) 4 z PLASMA STABILITY AND THE BOHR - VAN LEEUWEN THEOREM by J. Reece Roth Lewis Research Center Cleueland, Ohio NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. APRIL 1967 I ~ .. .. .. TECH LIBRARY KAFB, NM I llllll Illlll lull IIM IIllIll1 Ill1 OL3060b NASA TN D-3880 PLASMA STABILITY AND THE BOHR - VAN LEEWEN THEOREM By J. Reece Roth Lewis Research Center Cleveland, Ohio NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTI price $3.00 CONTENTS Page SUMMARY.- ........................................ 1 INTRODUCTION-___ ..................................... 2 THE BOHR - VAN LEEUWEN THEOREM ....................... 3 RELATION OF THE BOHR - VAN LEEUWEN THEOREM TO CONVENTIONAL MACROSCOPIC THEORIES OF PLASMA STABILITY ................ 3 The Momentum Equation .............................. 3 The Conventional Magnetostatic and Hydromagnetic Theories .......... 4 The Bohr - van Leeuwen Theorem. ........................ 7 Application of the Bohr - van Leeuwen Theorem to Plasmas ........... 9 The Bohr - van Leeuwen Theorem and the Literature of Plasma Physics .... 10 PLASMA CURRENTS ................................. 11 Assumptions of Analysis .............................. 11 Sources of Plasma Currents ............................ 12 Net Plasma Currents. ............................... 15 CHARACTERISTICS OF PLASMAS SATISFYING THE BOHR - VAN LEEUWEN THEOREM ..................................... -

Nova Laser Technology
Nova Laser Technology In building the Nova laser, we have significantly advanced many technologies, including the generation and propagation of laser beams. We have also developed innovations in the fields of alignment, diagnostics, computer control, and image processIng.• For further information contact Nova is the world's most powerful at least 10 to 30 times more energetic John F. Holzrichter (415) 423-7454. laser system. It is designed to heat and than Shiva would be needed to compress small targets, typically 0.1 cm investigate ignition conditions and in size, to conditions otherwise produced possibly to reach gains near unity. only in nuclear weapons or in the Because of the importance of such a interior of stars. Its beams can facility to the progress of inertial fusion concentrate 80 to 120 kJ of energy (in research and because of the construction 3 ns) or 80 to 120 TW of power (in time entailed (at least five to seven 100 ps) on such targets. To couple energy years), the Nova project was proposed to more favorably with the target, Nova's the Energy Research and Development laser light will be harmonically converted Administration and to Congress. It was with greater than 50% efficiency from its decided to base this system on the near-infrared fundamental wavelength proven master-oscillator, linear-amplifier (1.05-,um wavelength) to green (0.525- chain laser system used on the Argus ,um) or blue (0.35-,um) wavelengths. The and Shiva systems. We had great goals of our experiments with Nova are confidence in extending this to make accurate measurements of high neodymium-glass laser technology to the temperature and high-pressure states of 200- to 300-kJ level. -

ENGINEERING DESIGN of the NOVA LASER FACILITY for By
ENGINEERING DESIGN OF THE NOVA LASER FACILITY FOR INERTIAL-CONFINEMENT FUSION* by W. W. Simmons, R. 0. Godwin, C. A. Hurley, E. P. Wallerstein, K. Whitham, J. E. Murray, E. S. Bliss, R. G. Ozarski. M. A. Summers, F. Rienecker, D. G. Gritton, F. W. Holloway, G. J. Suski, J. R. Severyn, and the Nova Engineering Team. Abstract The design of the Nova Laser Facility for inertia! confinement fusion experiments at Lawrence Livermore National Laboratory is presented from an engineering perspective. Emphasis is placed upon design-to- performance requirements as they impact the various subsystems that comprise this complex experimental facility. - DISCLAIMER - CO;.T-CI104n--17D DEf;2 013.375 *Research performed under the auspices of the U.S. Department of Energy by the Lawrence Livermore National Laboratory under contract number W-7405-ENG-48. Foreword The Nova Laser System for Inertial Confinement Fusion studies at Lawrence Livermore National Laboratories represents a sophisticated engineering challenge to the national scientific and industrial community, embodying many disciplines - optical, mechanical, power and controls engineering for examples - employing state-of-the-art components and techniques. The papers collected here form a systematic, comprehensive presentation of the system engineering involved in the design, construction and operation of the Nova Facility, presently under construction at LLNL and scheduled for first operations in 1985. The 1st and 2nd Chapters present laser design and performance, as well as an introductory overview of the entire system; Chapters 3, 4 and 5 describe the major engineering subsystems; Chapters 6, 7, 8 and 9 document laser and target systems technology, including optical harmonic frequency conversion, its ramifications, and its impact upon other subsystems; and Chapters 10, 11, and 12 present an extensive discussion of our integrated approach to command, control and communications for the entire system. -

Modeling and Control of Plasma Rotation for NSTX Using
PAPER Related content - Central safety factor and N control on Modeling and control of plasma rotation for NSTX NSTX-U via beam power and plasma boundary shape modification, using TRANSP for closed loop simulations using neoclassical toroidal viscosity and neutral M.D. Boyer, R. Andre, D.A. Gates et al. beam injection - Topical Review M S Chu and M Okabayashi To cite this article: I.R. Goumiri et al 2016 Nucl. Fusion 56 036023 - Rotation and momentum transport in tokamaks and helical systems K. Ida and J.E. Rice View the article online for updates and enhancements. Recent citations - Design and simulation of the snowflake divertor control for NSTX–U P J Vail et al - Real-time capable modeling of neutral beam injection on NSTX-U using neural networks M.D. Boyer et al - Resistive wall mode physics and control challenges in JT-60SA high scenarios L. Pigatto et al This content was downloaded from IP address 128.112.165.144 on 09/09/2019 at 19:26 IOP Nuclear Fusion International Atomic Energy Agency Nuclear Fusion Nucl. Fusion Nucl. Fusion 56 (2016) 036023 (14pp) doi:10.1088/0029-5515/56/3/036023 56 Modeling and control of plasma rotation for 2016 NSTX using neoclassical toroidal viscosity © 2016 IAEA, Vienna and neutral beam injection NUFUAU I.R. Goumiri1, C.W. Rowley1, S.A. Sabbagh2, D.A. Gates3, S.P. Gerhardt3, M.D. Boyer3, R. Andre3, E. Kolemen3 and K. Taira4 036023 1 Department of Mechanical and Aerospace Engineering, Princeton University, Princeton, NJ 08544, USA I.R. Goumiri et al 2 Department of Applied Physics and Applied Mathematics, -
An Overview of the HIT-SI Research Program and Its Implications for Magnetic Fusion Energy
An overview of the HIT-SI research program and its implications for magnetic fusion energy Derek Sutherland, Tom Jarboe, and The HIT-SI Research Group University of Washington 36th Annual Fusion Power Associates Meeting – Strategies to Fusion Power December 16-17, 2015, Washington, D.C. Motivation • Spheromaks configurations are attractive for fusion power applications. • Previous spheromak experiments relied on coaxial helicity injection, which precluded good confinement during sustainment. • Fully inductive, non-axisymmetric helicity injection may allow us to overcome the limitations of past spheromak experiments. • Promising experimental results and an attractive reactor vision motivate continued exploration of this possible path to fusion power. Outline • Coaxial helicity injection NSTX and SSPX • Overview of the HIT-SI experiment • Motivating experimental results • Leading theoretical explanation • Reactor vision and comparisons • Conclusions and next steps Coaxial helicity injection (CHI) has been used successfully on NSTX to aid in non-inductive startup Figures: Raman, R., et al., Nucl. Fusion 53 (2013) 073017 • Reducing the need for inductive flux swing in an ST is important due to central solenoid flux-swing limitations. • Biasing the lower divertor plates with ambient magnetic field from coil sets in NSTX allows for the injection of magnetic helicity. • A ST plasma configuration is formed via CHI that is then augmented with other current drive methods to reach desired operating point, reducing or eliminating the need for a central solenoid. • Demonstrated on HIT-II at the University of Washington and successfully scaled to NSTX. Though CHI is useful on startup in NSTX, Cowling’s theorem removes the possibility of a steady-state, axisymmetric dynamo of interest for reactor applications • Cowling* argued that it is impossible to have a steady-state axisymmetric MHD dynamo (sustain current on magnetic axis against resistive dissipation). -

An Overview of Plasma Confinement in Toroidal Systems
An Overview of Plasma Confinement in Toroidal Systems Fatemeh Dini, Reza Baghdadi, Reza Amrollahi Department of Physics and Nuclear Engineering, Amirkabir University of Technology, Tehran, Iran Sina Khorasani School of Electrical Engineering, Sharif University of Technology, Tehran, Iran Table of Contents Abstract I. Introduction ………………………………………………………………………………………… 2 I. 1. Energy Crisis ……………………………………………………………..………………. 2 I. 2. Nuclear Fission ……………………………………………………………………………. 4 I. 3. Nuclear Fusion ……………………………………………………………………………. 6 I. 4. Other Fusion Concepts ……………………………………………………………………. 10 II. Plasma Equilibrium ………………………………………………………………………………… 12 II. 1. Ideal Magnetohydrodynamics ……………………………………………………………. 12 II. 2. Curvilinear System of Coordinates ………………………………………………………. 15 II. 3. Flux Coordinates …………………………………………………………………………. 23 II. 4. Extensions to Axisymmetric Equilibrium ………………………………………………… 32 II. 5. Grad-Shafranov equation (GSE) …………………………………………………………. 37 II. 6. Green's Function Formalism ………………………………………………………………. 41 II. 7. Analytical and Numerical Solutions to GSE ……………………………………………… 50 III. Plasma Stability …………………………………………………………………………………… 66 III. 1. Lyapunov Stability in Nonlinear Systems ………………………………………………… 67 III. 2. Energy Principle ……………………………………………………………………………69 III. 3. Modal Analysis ……………………………………………………………………………. 75 III. 4. Simplifications for Axisymmetric Machines ……………………………………………… 82 IV. Plasma Transport …………………………………………………………………………………. 86 IV. 1. Boltzmann Equations ……………………………………………………………………… 87 IV. 2. Flux-Surface-Average -

Plasma Physics and Controlled Fusion Research During Half a Century Bo Lehnert
SE0100262 TRITA-A Report ISSN 1102-2051 VETENSKAP OCH ISRN KTH/ALF/--01/4--SE IONST KTH Plasma Physics and Controlled Fusion Research During Half a Century Bo Lehnert Research and Training programme on CONTROLLED THERMONUCLEAR FUSION AND PLASMA PHYSICS (Association EURATOM/NFR) FUSION PLASMA PHYSICS ALFV N LABORATORY ROYAL INSTITUTE OF TECHNOLOGY SE-100 44 STOCKHOLM SWEDEN PLEASE BE AWARE THAT ALL OF THE MISSING PAGES IN THIS DOCUMENT WERE ORIGINALLY BLANK TRITA-ALF-2001-04 ISRN KTH/ALF/--01/4--SE Plasma Physics and Controlled Fusion Research During Half a Century Bo Lehnert VETENSKAP OCH KONST Stockholm, June 2001 The Alfven Laboratory Division of Fusion Plasma Physics Royal Institute of Technology SE-100 44 Stockholm, Sweden (Association EURATOM/NFR) Printed by Alfven Laboratory Fusion Plasma Physics Division Royal Institute of Technology SE-100 44 Stockholm PLASMA PHYSICS AND CONTROLLED FUSION RESEARCH DURING HALF A CENTURY Bo Lehnert Alfven Laboratory, Royal Institute of Technology S-100 44 Stockholm, Sweden ABSTRACT A review is given on the historical development of research on plasma physics and controlled fusion. The potentialities are outlined for fusion of light atomic nuclei, with respect to the available energy resources and the environmental properties. Various approaches in the research on controlled fusion are further described, as well as the present state of investigation and future perspectives, being based on the use of a hot plasma in a fusion reactor. Special reference is given to the part of this work which has been conducted in Sweden, merely to identify its place within the general historical development. Considerable progress has been made in fusion research during the last decades. -

Plasma Physics and Fusion Energy
This page intentionally left blank PLASMA PHYSICS AND FUSION ENERGY There has been an increase in worldwide interest in fusion research over the last decade due to the recognition that a large number of new, environmentally attractive, sustainable energy sources will be needed during the next century to meet the ever increasing demand for electrical energy. This has led to an international agreement to build a large, $4 billion, reactor-scale device known as the “International Thermonuclear Experimental Reactor” (ITER). Plasma Physics and Fusion Energy is based on a series of lecture notes from graduate courses in plasma physics and fusion energy at MIT. It begins with an overview of world energy needs, current methods of energy generation, and the potential role that fusion may play in the future. It covers energy issues such as fusion power production, power balance, and the design of a simple fusion reactor before discussing the basic plasma physics issues facing the development of fusion power – macroscopic equilibrium and stability, transport, and heating. This book will be of interest to graduate students and researchers in the field of applied physics and nuclear engineering. A large number of problems accumulated over two decades of teaching are included to aid understanding. Jeffrey P. Freidberg is a Professor and previous Head of the Nuclear Science and Engineering Department at MIT. He is also an Associate Director of the Plasma Science and Fusion Center, which is the main fusion research laboratory at MIT. PLASMA PHYSICS AND FUSION ENERGY Jeffrey P. Freidberg Massachusetts Institute of Technology CAMBRIDGE UNIVERSITY PRESS Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo Cambridge University Press The Edinburgh Building, Cambridge CB2 8RU, UK Published in the United States of America by Cambridge University Press, New York www.cambridge.org Information on this title: www.cambridge.org/9780521851077 © J.