FPGA-Accelerated Samplesort for Large Data Sets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
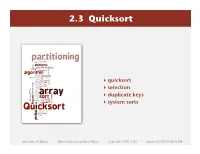
2.3 Quicksort
2.3 Quicksort ‣ quicksort ‣ selection ‣ duplicate keys ‣ system sorts Algorithms, 4th Edition · Robert Sedgewick and Kevin Wayne · Copyright © 2002–2010 · January 30, 2011 12:46:16 PM Two classic sorting algorithms Critical components in the world’s computational infrastructure. • Full scientific understanding of their properties has enabled us to develop them into practical system sorts. • Quicksort honored as one of top 10 algorithms of 20th century in science and engineering. Mergesort. last lecture • Java sort for objects. • Perl, C++ stable sort, Python stable sort, Firefox JavaScript, ... Quicksort. this lecture • Java sort for primitive types. • C qsort, Unix, Visual C++, Python, Matlab, Chrome JavaScript, ... 2 ‣ quicksort ‣ selection ‣ duplicate keys ‣ system sorts 3 Quicksort Basic plan. • Shuffle the array. • Partition so that, for some j - element a[j] is in place - no larger element to the left of j j - no smaller element to the right of Sir Charles Antony Richard Hoare • Sort each piece recursively. 1980 Turing Award input Q U I C K S O R T E X A M P L E shu!e K R A T E L E P U I M Q C X O S partitioning element partition E C A I E K L P U T M Q R X O S not greater not less sort left A C E E I K L P U T M Q R X O S sort right A C E E I K L M O P Q R S T U X result A C E E I K L M O P Q R S T U X Quicksort overview 4 Quicksort partitioning Basic plan. -

Parallel Sorting Algorithms + Topic Overview
+ Design of Parallel Algorithms Parallel Sorting Algorithms + Topic Overview n Issues in Sorting on Parallel Computers n Sorting Networks n Bubble Sort and its Variants n Quicksort n Bucket and Sample Sort n Other Sorting Algorithms + Sorting: Overview n One of the most commonly used and well-studied kernels. n Sorting can be comparison-based or noncomparison-based. n The fundamental operation of comparison-based sorting is compare-exchange. n The lower bound on any comparison-based sort of n numbers is Θ(nlog n) . n We focus here on comparison-based sorting algorithms. + Sorting: Basics What is a parallel sorted sequence? Where are the input and output lists stored? n We assume that the input and output lists are distributed. n The sorted list is partitioned with the property that each partitioned list is sorted and each element in processor Pi's list is less than that in Pj's list if i < j. + Sorting: Parallel Compare Exchange Operation A parallel compare-exchange operation. Processes Pi and Pj send their elements to each other. Process Pi keeps min{ai,aj}, and Pj keeps max{ai, aj}. + Sorting: Basics What is the parallel counterpart to a sequential comparator? n If each processor has one element, the compare exchange operation stores the smaller element at the processor with smaller id. This can be done in ts + tw time. n If we have more than one element per processor, we call this operation a compare split. Assume each of two processors have n/p elements. n After the compare-split operation, the smaller n/p elements are at processor Pi and the larger n/p elements at Pj, where i < j. -
Sorting Networks
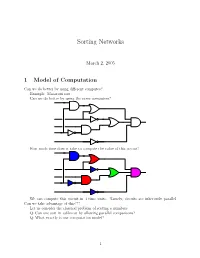
Sorting Networks March 2, 2005 1 Model of Computation Can we do better by using different computes? Example: Macaroni sort. Can we do better by using the same computers? How much time does it take to compute the value of this circuit? We can compute this circuit in 4 time units. Namely, circuits are inherently parallel. Can we take advantage of this??? Let us consider the classical problem of sorting n numbers. Q: Can one sort in sublinear by allowing parallel comparisons? Q: What exactly is our computation model? 1 1.1 Computing with a circuit We are going to design a circuit, where the inputs are the numbers, and we compare two numbers using a comparator gate: ¢¤¦© ¡ ¡ Comparator ¡£¢¥¤§¦©¨ ¡ For our drawings, we will draw such a gate as follows: ¢¡¤£¦¥¨§ © ¡£¦ So, circuits would just be horizontal lines, with vertical segments (i.e., gates) between them. A complete sorting network, looks like: The inputs come on the wires on the left, and are output on the wires on the right. The largest number is output on the bottom line. The surprising thing, is that one can generate circuits from a sorting algorithm. In fact, consider the following circuit: Q: What does this circuit does? A: This is the inner loop of insertion sort. Repeating this inner loop, we get the following sorting network: 2 Alternative way of drawing it: Q: How much time does it take for this circuit to sort the n numbers? Running time = how many time clocks we have to wait till the result stabilizes. In this case: 5 1 2 3 4 6 7 8 9 In general, we get: Lemma 1.1 Insertion sort requires 2n − 1 time units to sort n numbers. -

Foundations of Differentially Oblivious Algorithms
Foundations of Differentially Oblivious Algorithms T-H. Hubert Chan Kai-Min Chung Bruce Maggs Elaine Shi August 5, 2020 Abstract It is well-known that a program's memory access pattern can leak information about its input. To thwart such leakage, most existing works adopt the technique of oblivious RAM (ORAM) simulation. Such an obliviousness notion has stimulated much debate. Although ORAM techniques have significantly improved over the past few years, the concrete overheads are arguably still undesirable for real-world systems | part of this overhead is in fact inherent due to a well-known logarithmic ORAM lower bound by Goldreich and Ostrovsky. To make matters worse, when the program's runtime or output length depend on secret inputs, it may be necessary to perform worst-case padding to achieve full obliviousness and thus incur possibly super-linear overheads. Inspired by the elegant notion of differential privacy, we initiate the study of a new notion of access pattern privacy, which we call \(, δ)-differential obliviousness". We separate the notion of (, δ)-differential obliviousness from classical obliviousness by considering several fundamental algorithmic abstractions including sorting small-length keys, merging two sorted lists, and range query data structures (akin to binary search trees). We show that by adopting differential obliv- iousness with reasonable choices of and δ, not only can one circumvent several impossibilities pertaining to full obliviousness, one can also, in several cases, obtain meaningful privacy with little overhead relative to the non-private baselines (i.e., having privacy \almost for free"). On the other hand, we show that for very demanding choices of and δ, the same lower bounds for oblivious algorithms would be preserved for (, δ)-differential obliviousness. -
Advanced Topics in Sorting
Advanced Topics in Sorting complexity system sorts duplicate keys comparators 1 complexity system sorts duplicate keys comparators 2 Complexity of sorting Computational complexity. Framework to study efficiency of algorithms for solving a particular problem X. Machine model. Focus on fundamental operations. Upper bound. Cost guarantee provided by some algorithm for X. Lower bound. Proven limit on cost guarantee of any algorithm for X. Optimal algorithm. Algorithm with best cost guarantee for X. lower bound ~ upper bound Example: sorting. • Machine model = # comparisons access information only through compares • Upper bound = N lg N from mergesort. • Lower bound ? 3 Decision Tree a < b yes no code between comparisons (e.g., sequence of exchanges) b < c a < c yes no yes no a b c b a c a < c b < c yes no yes no a c b c a b b c a c b a 4 Comparison-based lower bound for sorting Theorem. Any comparison based sorting algorithm must use more than N lg N - 1.44 N comparisons in the worst-case. Pf. Assume input consists of N distinct values a through a . • 1 N • Worst case dictated by tree height h. N ! different orderings. • • (At least) one leaf corresponds to each ordering. Binary tree with N ! leaves cannot have height less than lg (N!) • h lg N! lg (N / e) N Stirling's formula = N lg N - N lg e N lg N - 1.44 N 5 Complexity of sorting Upper bound. Cost guarantee provided by some algorithm for X. Lower bound. Proven limit on cost guarantee of any algorithm for X. -

Sorting Algorithm 1 Sorting Algorithm
Sorting algorithm 1 Sorting algorithm In computer science, a sorting algorithm is an algorithm that puts elements of a list in a certain order. The most-used orders are numerical order and lexicographical order. Efficient sorting is important for optimizing the use of other algorithms (such as search and merge algorithms) that require sorted lists to work correctly; it is also often useful for canonicalizing data and for producing human-readable output. More formally, the output must satisfy two conditions: 1. The output is in nondecreasing order (each element is no smaller than the previous element according to the desired total order); 2. The output is a permutation, or reordering, of the input. Since the dawn of computing, the sorting problem has attracted a great deal of research, perhaps due to the complexity of solving it efficiently despite its simple, familiar statement. For example, bubble sort was analyzed as early as 1956.[1] Although many consider it a solved problem, useful new sorting algorithms are still being invented (for example, library sort was first published in 2004). Sorting algorithms are prevalent in introductory computer science classes, where the abundance of algorithms for the problem provides a gentle introduction to a variety of core algorithm concepts, such as big O notation, divide and conquer algorithms, data structures, randomized algorithms, best, worst and average case analysis, time-space tradeoffs, and lower bounds. Classification Sorting algorithms used in computer science are often classified by: • Computational complexity (worst, average and best behaviour) of element comparisons in terms of the size of the list . For typical sorting algorithms good behavior is and bad behavior is . -
Visvesvaraya Technological University a Project Report
` VISVESVARAYA TECHNOLOGICAL UNIVERSITY “Jnana Sangama”, Belagavi – 590 018 A PROJECT REPORT ON “PREDICTIVE SCHEDULING OF SORTING ALGORITHMS” Submitted in partial fulfillment for the award of the degree of BACHELOR OF ENGINEERING IN COMPUTER SCIENCE AND ENGINEERING BY RANJIT KUMAR SHA (1NH13CS092) SANDIP SHAH (1NH13CS101) SAURABH RAI (1NH13CS104) GAURAV KUMAR (1NH13CS718) Under the guidance of Ms. Sridevi (Senior Assistant Professor, Dept. of CSE, NHCE) DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING NEW HORIZON COLLEGE OF ENGINEERING (ISO-9001:2000 certified, Accredited by NAAC ‘A’, Permanently affiliated to VTU) Outer Ring Road, Panathur Post, Near Marathalli, Bangalore – 560103 ` NEW HORIZON COLLEGE OF ENGINEERING (ISO-9001:2000 certified, Accredited by NAAC ‘A’ Permanently affiliated to VTU) Outer Ring Road, Panathur Post, Near Marathalli, Bangalore-560 103 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING CERTIFICATE Certified that the project work entitled “PREDICTIVE SCHEDULING OF SORTING ALGORITHMS” carried out by RANJIT KUMAR SHA (1NH13CS092), SANDIP SHAH (1NH13CS101), SAURABH RAI (1NH13CS104) and GAURAV KUMAR (1NH13CS718) bonafide students of NEW HORIZON COLLEGE OF ENGINEERING in partial fulfillment for the award of Bachelor of Engineering in Computer Science and Engineering of the Visvesvaraya Technological University, Belagavi during the year 2016-2017. It is certified that all corrections/suggestions indicated for Internal Assessment have been incorporated in the report deposited in the department library. The project report has been approved as it satisfies the academic requirements in respect of Project work prescribed for the Degree. Name & Signature of Guide Name Signature of HOD Signature of Principal (Ms. Sridevi) (Dr. Prashanth C.S.R.) (Dr. Manjunatha) External Viva Name of Examiner Signature with date 1. -

Super Scalar Sample Sort
Super Scalar Sample Sort Peter Sanders1 and Sebastian Winkel2 1 Max Planck Institut f¨ur Informatik Saarbr¨ucken, Germany, [email protected] 2 Chair for Prog. Lang. and Compiler Construction Saarland University, Saarbr¨ucken, Germany, [email protected] Abstract. Sample sort, a generalization of quicksort that partitions the input into many pieces, is known as the best practical comparison based sorting algorithm for distributed memory parallel computers. We show that sample sort is also useful on a single processor. The main algorith- mic insight is that element comparisons can be decoupled from expensive conditional branching using predicated instructions. This transformation facilitates optimizations like loop unrolling and software pipelining. The final implementation, albeit cache efficient, is limited by a linear num- ber of memory accesses rather than the O(n log n) comparisons. On an Itanium 2 machine, we obtain a speedup of up to 2 over std::sort from the GCC STL library, which is known as one of the fastest available quicksort implementations. 1 Introduction Counting comparisons is the most common way to compare the complexity of comparison based sorting algorithms. Indeed, algorithms like quicksort with good sampling strategies [9,14] or merge sort perform close to the lower bound of log n! n log n comparisons3 for sorting n elements and are among the best algorithms≈ in practice (e.g., [24, 20, 5]). At least for numerical keys it is a bit astonishing that comparison operations alone should be good predictors for ex- ecution time because comparing numbers is equivalent to subtraction — an operation of negligible cost compared to memory accesses. -

I. Sorting Networks Thomas Sauerwald
I. Sorting Networks Thomas Sauerwald Easter 2015 Outline Outline of this Course Introduction to Sorting Networks Batcher’s Sorting Network Counting Networks I. Sorting Networks Outline of this Course 2 Closely follow the book and use the same numberring of theorems/lemmas etc. I. Sorting Networks (Sorting, Counting, Load Balancing) II. Matrix Multiplication (Serial and Parallel) III. Linear Programming (Formulating, Applying and Solving) IV. Approximation Algorithms: Covering Problems V. Approximation Algorithms via Exact Algorithms VI. Approximation Algorithms: Travelling Salesman Problem VII. Approximation Algorithms: Randomisation and Rounding VIII. Approximation Algorithms: MAX-CUT Problem (Tentative) List of Topics Algorithms (I, II) Complexity Theory Advanced Algorithms I. Sorting Networks Outline of this Course 3 Closely follow the book and use the same numberring of theorems/lemmas etc. (Tentative) List of Topics Algorithms (I, II) Complexity Theory Advanced Algorithms I. Sorting Networks (Sorting, Counting, Load Balancing) II. Matrix Multiplication (Serial and Parallel) III. Linear Programming (Formulating, Applying and Solving) IV. Approximation Algorithms: Covering Problems V. Approximation Algorithms via Exact Algorithms VI. Approximation Algorithms: Travelling Salesman Problem VII. Approximation Algorithms: Randomisation and Rounding VIII. Approximation Algorithms: MAX-CUT Problem I. Sorting Networks Outline of this Course 3 (Tentative) List of Topics Algorithms (I, II) Complexity Theory Advanced Algorithms I. Sorting Networks (Sorting, Counting, Load Balancing) II. Matrix Multiplication (Serial and Parallel) III. Linear Programming (Formulating, Applying and Solving) IV. Approximation Algorithms: Covering Problems V. Approximation Algorithms via Exact Algorithms VI. Approximation Algorithms: Travelling Salesman Problem VII. Approximation Algorithms: Randomisation and Rounding VIII. Approximation Algorithms: MAX-CUT Problem Closely follow the book and use the same numberring of theorems/lemmas etc. -

An 11-Step Sorting Network for 18 Elements
An 11-Step Sorting Network for 18 Elements Sherenaz W. Al-Haj Baddar, Kenneth E. Batcher Kent State University Department of Computer Science Kent, Ohio 44240 [email protected] [email protected] output set must be a permutation of the input set {I1,I2,…,IN}. Abstract— Sorting Networks are cost-effective multistage Moreover, for every two elements of the output set Oj and Ok, interconnection networks with sorting capabilities. These Oj must be less than or equal to Ok whenever j ≤ k. networks theoretically consume Θ(NlogN) comparisons. However, Sorting networks are constructed using stages (steps) of the fastest implementable sorting networks built so far consume basic cells called Comparator Exchange(CE) modules. A CE is Θ(Nlog2N) comparisons, and generally, use the Merge-sorting a 2-element sorting circuit. It accepts two inputs via two input strategy to sort the input. An 18-element network using the Merge-sorting strategy needs at least 12 steps-here we show a lines, compares them and outputs the larger element on its high network that sorts 18 elements in only 11 steps. output line, whereas the smaller is output on its low output line. It is assumed that two comparators with disjoint inputs can operate in parallel. A typical CE is depicted in Figure 1[2]. Index Terms—Sorting Networks, Partial Ordering, 0/1 cases. I. INTRODUCTION Parallel processors are fast and powerful computing systems Figure 1. A comparator exchange module[2] that have been developed to help undertake computationally challenging problems. Deploying parallelism for solving a An optimal N-element sorting network requires θ(NlogN) given problem implies splitting the problem into subtasks. -

How to Sort out Your Life in O(N) Time
How to sort out your life in O(n) time arel Číže @kaja47K funkcionaklne.cz I said, "Kiss me, you're beautiful - These are truly the last days" Godspeed You! Black Emperor, The Dead Flag Blues Everyone, deep in their hearts, is waiting for the end of the world to come. Haruki Murakami, 1Q84 ... Free lunch 1965 – 2022 Cramming More Components onto Integrated Circuits http://www.cs.utexas.edu/~fussell/courses/cs352h/papers/moore.pdf He pays his staff in junk. William S. Burroughs, Naked Lunch Sorting? quicksort and chill HS 1964 QS 1959 MS 1945 RS 1887 quicksort, mergesort, heapsort, radix sort, multi- way merge sort, samplesort, insertion sort, selection sort, library sort, counting sort, bucketsort, bitonic merge sort, Batcher odd-even sort, odd–even transposition sort, radix quick sort, radix merge sort*, burst sort binary search tree, B-tree, R-tree, VP tree, trie, log-structured merge tree, skip list, YOLO tree* vs. hashing Robin Hood hashing https://cs.uwaterloo.ca/research/tr/1986/CS-86-14.pdf xs.sorted.take(k) (take (sort xs) k) qsort(lotOfIntegers) It may be the wrong decision, but fuck it, it's mine. (Mark Z. Danielewski, House of Leaves) I tell you, my man, this is the American Dream in action! We’d be fools not to ride this strange torpedo all the way out to the end. (HST, FALILV) Linear time sorting? I owe the discovery of Uqbar to the conjunction of a mirror and an Encyclopedia. (Jorge Luis Borges, Tlön, Uqbar, Orbis Tertius) Sorting out graph processing https://github.com/frankmcsherry/blog/blob/master/posts/2015-08-15.md Radix Sort Revisited http://www.codercorner.com/RadixSortRevisited.htm Sketchy radix sort https://github.com/kaja47/sketches (thinking|drinking|WTF)* I know they accuse me of arrogance, and perhaps misanthropy, and perhaps of madness. -

Selection O. Best Sorting Algorithm
International Journal of Intelligent Information Processing © Serials Publications 2(2) July-December 2008; pp. 363-368 SELECTION O BEST SORTING ALGORITHM ADITYA DEV MISHRA* & DEEPAK GARG** The problem of sorting is a problem that arises frequently in computer programming. Many different sorting algorithms have been developed and improved to make sorting fast. As a measure of performance mainly the average number of operations or the average execution times of these algorithms have been investigated and compared. There is no one sorting method that is best for every situation. Some of the factors to be considered in choosing a sorting algorithm include the size of the list to be sorted, the programming effort, the number of words of main memory available, the size of disk or tape units, the extent to which the list is already ordered, and the distribution of values. Keywords: Sorting, complexity lists, comparisons, movement sorting algorithms, methods, stable, unstable, internal sorting 1. INTRODUCTION Sorting is one of the most important and well-studied problems in computer science. Many good algorithms are known which offer various trade-offs in efficiency, simplicity, memory use, and other factors. However, these algorithms do not take into account features of modern computer architectures that significantly influence performance. A large number of sorting algorithms have been proposed and their asymptotic complexity, in terms of the number of comparisons or number of iterations, has been carefully analyzed [1]. In the recent past, there has been a growing interest on improvements to sorting algorithms that do not affect their asymptotic complexity but nevertheless improve performance by enhancing data locality [3,6].