Automated Asteroid Selection for a 'Grand Tour' Mission 1 Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
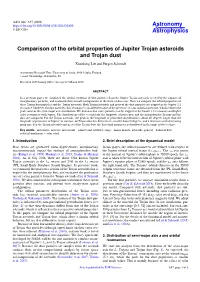
Comparison of the Orbital Properties of Jupiter Trojan Asteroids and Trojan Dust Xiaodong Liu and Jürgen Schmidt
A&A 614, A97 (2018) https://doi.org/10.1051/0004-6361/201832806 Astronomy & © ESO 2018 Astrophysics Comparison of the orbital properties of Jupiter Trojan asteroids and Trojan dust Xiaodong Liu and Jürgen Schmidt Astronomy Research Unit, University of Oulu, 90014 Oulu, Finland e-mail: [email protected] Received 10 February 2018 / Accepted 7 March 2018 ABSTRACT In a previous paper we simulated the orbital evolution of dust particles from the Jupiter Trojan asteroids ejected by the impacts of interplanetary particles, and evaluated their overall configuration in the form of dust arcs. Here we compare the orbital properties of these Trojan dust particles and the Trojan asteroids. Both Trojan asteroids and most of the dust particles are trapped in the Jupiter 1:1 resonance. However, for dust particles, this resonance is modified because of the presence of solar radiation pressure, which reduces the peak value of the semi-major axis distribution. We find also that some particles can be trapped in the Saturn 1:1 resonance and higher order resonances with Jupiter. The distributions of the eccentricity, the longitude of pericenter, and the inclination for Trojans and the dust are compared. For the Trojan asteroids, the peak in the longitude of pericenter distribution is about 60 degrees larger than the longitude of pericenter of Jupiter; in contrast, for Trojan dust this difference is smaller than 60 degrees, and it decreases with decreasing grain size. For the Trojan asteroids and most of the Trojan dust, the Tisserand parameter is distributed in the range of two to three. Key words. meteorites, meteors, meteoroids – planets and satellites: rings – minor planets, asteroids: general – zodiacal dust – celestial mechanics – solar wind 1. -

Template for Manuscripts in Advances in Space Research
DISCUS - The Deep Interior Scanning CubeSat mission to a rubble pile near-Earth asteroid Patrick Bambach1* Jakob Deller1 Esa Vilenius1 Sampsa Pursiainen2 Mika Takala2 Hans Martin Braun3 Harald Lentz3 Manfred Wittig4 1 Max Planck Institute for Solar System Research, Justus-von-Liebig-Weg 3, 37077 G¨ottingen,Germany 2 Tampere University of Technology, PO Box 527, FI-33101 Tampere, Finland 3 RST Radar Systemtechnik AG, Ebenaustrasse 8, 9413 Oberegg, Switzerland 4 MEW-Aerospace UG, Hameln, Germany * [email protected] Submitted to Advances in Space Research Abstract We have performed an initial stage conceptual design study for the Deep Interior Scanning CubeSat (DIS- CUS), a tandem 6U CubeSat carrying a bistatic radar as the main payload. DISCUS will be operated either as an independent mission or accompanying a larger one. It is designed to determine the internal macro- porosity of a 260{600 m diameter Near Earth Asteroid (NEA) from a few kilometers distance. The main goal will be to achieve a global penetration with a low-frequency signal as well as to analyze the scattering strength for various different penetration depths and measurement positions. Moreover, the measurements will be inverted through a computed radar tomography (CRT) approach. The scientific data provided by DISCUS would bring more knowledge of the internal configuration of rubble pile asteroids and their colli- sional evolution in the Solar System. It would also advance the design of future asteroid deflection concepts. We aim at a single-unit (1U) radar design equipped with a half-wavelength dipole antenna. The radar will utilize a stepped-frequency modulation technique the baseline of which was developed for ESA's technology projects GINGER and PIRA. -

Astrodynamic Fundamentals for Deflecting Hazardous Near-Earth Objects
IAC-09-C1.3.1 Astrodynamic Fundamentals for Deflecting Hazardous Near-Earth Objects∗ Bong Wie† Asteroid Deflection Research Center Iowa State University, Ames, IA 50011, United States [email protected] Abstract mate change caused by this asteroid impact may have caused the dinosaur extinction. On June 30, 1908, an The John V. Breakwell Memorial Lecture for the As- asteroid or comet estimated at 30 to 50 m in diameter trodynamics Symposium of the 60th International As- exploded in the skies above Tunguska, Siberia. Known tronautical Congress (IAC) presents a tutorial overview as the Tunguska Event, the explosion flattened trees and of the astrodynamical problem of deflecting a near-Earth killed other vegetation over a 500,000-acre area with an object (NEO) that is on a collision course toward Earth. energy level equivalent to about 500 Hiroshima nuclear This lecture focuses on the astrodynamic fundamentals bombs. of such a technically challenging, complex engineering In the early 1990s, scientists around the world initi- problem. Although various deflection technologies have ated studies to prevent NEOs from striking Earth [1]. been proposed during the past two decades, there is no However, it is now 2009, and there is no consensus on consensus on how to reliably deflect them in a timely how to reliably deflect them in a timely manner even manner. Consequently, now is the time to develop prac- though various mitigation approaches have been inves- tically viable technologies that can be used to mitigate tigated during the past two decades [1-8]. Consequently, threats from NEOs while also advancing space explo- now is the time for initiating a concerted R&D effort for ration. -

NASA's DART Mission Targets Twins for Asteroid Defense
VISIONARY NASA’s DART Targets Twins Bfyo jorhn FA. Krsosts eroid Defense Taking a page from a science fiction movie DART would slam into the space rock about script, NASA has approved a mission to de - nine-times faster than a bullet—six kilome - flect an asteroid to further planetary de - ters per second—allowing Earth-based fense. The mission, dubbed the Double observatories to see the crash and shift Asteroid Redirection Test (DART), takes aim in the orbit of Didymos B around its larger at an intermediate-size object that could twin. “We intend to… change the orbital cause regional damage if it collided with period of Didymos… seven minutes or Earth. “DART would be NASA’s first mission more… and we will be able to see that from to demonstrate what’s known as the kinetic the ground,” predicted Cheryl Reed, DART’s impactor technique—striking the asteroid to project manager at the Johns Hopkins *1 shift its orbit—to defend against a potential University Applied Physics Laboratory future asteroid impact,” said Lindley John - (JHUAPL). son, planetary defense officer at NASA headquarters. To acquire the know-how The sudden impact would change the needed to tackle potential threats, NASA mutual orbit of the two objects, but cause created the Planetary Defense Coordination only a minor shift in the heliocentric orbit Office (PDCO) in 2016 to ramp up the track - of the system. Although the Didymos twins ing and characterization of potentially haz - pose no threat, in principle, even a small ardous objects and coordinate a response. nudge to a menacing asteroid could change In concert, the U.S. -
Interstellar Interlopers Two Recently Sighted Space Rocks That Came from Beyond the Solar System Have Puzzled Astronomers
A S T R O N O MY InterstellarInterstellar Interlopers Two recently sighted space rocks that came from beyond the solar system have puzzled astronomers 42 Scientific American, October 2020 © 2020 Scientific American 1I/‘OUMUAMUA, the frst interstellar object ever observed in the solar system, passed close to Earth in 2017. InterstellarInterlopers Interlopers Two recently sighted space rocks that came from beyond the solar system have puzzled astronomers By David Jewitt and Amaya Moro-Martín Illustrations by Ron Miller October 2020, ScientificAmerican.com 43 © 2020 Scientific American David Jewitt is an astronomer at the University of California, Los Angeles, where he studies the primitive bodies of the solar system and beyond. Amaya Moro-Martín is an astronomer at the Space Telescope Science Institute in Baltimore. She investigates planetary systems and extrasolar comets. ATE IN THE EVENING OF OCTOBER 24, 2017, AN E-MAIL ARRIVED CONTAINING tantalizing news of the heavens. Astronomer Davide Farnocchia of NASA’s Jet Propulsion Laboratory was writing to one of us (Jewitt) about a new object in the sky with a very strange trajectory. Discovered six days earli- er by University of Hawaii astronomer Robert Weryk, the object, initially dubbed P10Ee5V, was traveling so fast that the sun could not keep it in orbit. Instead of its predicted path being a closed ellipse, its orbit was open, indicating that it would never return. “We still need more data,” Farnocchia wrote, “but the orbit appears to be hyperbolic.” Within a few hours, Jewitt wrote to Jane Luu, a long-time collaborator with Norwegian connections, about observing the new object with the Nordic Optical Telescope in LSpain. -

ASTER Mission : Stability Regions Around the Triple Asteroid
ASTER MISSION: STABILITY REGIONS AROUND THE TRIPLE ASTEROID 2001 SN263. O.C.Winter (1), R.A.N.Araujo (2), A.F.B.A.Prado (2), A. Sukhanov (2) (1)UNESP - Universidade Estadual Paulista, Av. Dr. Ariberto Pereira da Cunha, 333 CEP: 12.516-410 Guaratinguetá, SP, Brazil. E-mail:[email protected] (2) INPE, Instituto Nacional de Pesquisas Espaciais, Av. dos Astronautas, 1.758 Jd. Granja - CEP: 12227-010, São José dos Campos, SP, Brazil. E-mails: [email protected], [email protected], [email protected] Abstract: The celestial body 2001 SN263 is a near Earth asteroid (NEA) with semi-major axis 1.985 A.U., eccentricity 0.48 and orbital inclination 6.7 degrees. Light-curves obtained in the Observatory of Haute-Provence, in January 2008, lead to the conclusion that this asteroid was a binary system. In February 2008 the system was observed along 16 days by the radio-astronomy station of Arecibo, in Porto Rico. These observations resulted in the discovery that 2001 SN263 is a triple system [1]. The components of the system have diameters of about 2.8 km, 1.2 km and 0.5 km. With respect to the major body, the second component has a semi-major axis of about 17 km (period of 147hrs) and the third component has a semi-major axis of about 4 km (period of 46hrs) [2]. This triple system is the target of the first brazilian mission to an asteroid. In order to design a mission to explore this interesting triple asteroid system, it was made a study of the stability regions around each one of the three components and around the whole system. -
Mars Micromissions
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by DigitalCommons@USU SSC99-VII-6 MARS MICROMISSIONS Steve Matousek1, Kim Leschly2, Bob Gershman3, and John Reimer4 13th Annual AIAA/USU Conference on Small Satellites Logan, Utah August 23-26, 1999 1Member of Technical Staff, Mission and Systems Architecture Section, Jet Propulsion Laboratory, Califor- nia Institute of Technology, MS 264-426, 4800 Oak Grove Dr., Pasadena, CA 91109-8099, (818)354- 6689, [email protected], Senior member, AIAA 2Member of Technical Staff, Flight Systems Section, Jet Propulsion Laboratory, California Institute of Tech- nology, MS 301-485, 4800 Oak Grove Dr., Pasadena, CA 91109-8099, (818)354-3201, [email protected] 3Planetary Advanced Missions Manager, Mission and Systems Architecture Section, Jet Propulsion Labora- tory, California Institute of Technology, MS 301-170U, 4800 Oak Grove Dr., Pasadena, CA 91109-8099, (818)354-5113, [email protected] 4Member of Technical Staff, Mission and Systems Architecture Section, Jet Propulsion Laboratory, Califor- nia Institute of Technology, MS 301-180, 4800 Oak Grove Dr., Pasadena, CA 91109-8099, (818)354- 5088, [email protected] The work described was performed at the Jet Propulsion Laboratory, California Institute of Tech- nology under contract with the National Aeronautics and Space Administration. SSC99-VII-6 Abstract A Mars micromission launches as an Ariane 5 secondary as early as November 1, 2002. One possible mission is a comm/nav micromission orbiter. The other possible mission is a Mars airplane. Both missions are enabled by a low- cost, common micromission bus design. -

The Orbit and Density of the Jupiter Trojan Satellite System Eurybates-Queta Michael E
Draft version June 7, 2021 Typeset using LATEX preprint2 style in AASTeX63 The orbit and density of the Jupiter Trojan satellite system Eurybates-Queta Michael E. Brown,1 Harold F: Levison,2 Keith S. Noll,3 Richard Binzel,4 Marc W. Buie,2 Will Grundy,5 Simone Marchi,2 Catherine B. Olkin,2 John Spencer,2 Thomas S. Statler,6 and Harold Weaver7 1Division of Geological and Planetary Sciences California Institute of Technology Pasadena, CA 91125, USA 2Southwest Research Institute 1050 Walnut Street, Suite 300 Boulder, CO 80302, USA 3NASA Goddard Spaceflight Center 4Massachusetts Institute of Technology 5Lowell Observatory and Northern Arizona University, Flagstaff, AZ, USA 6NASA Headquarters 300 Hidden Figures Way Washington, DC 20546, USA 7Johns Hopkins University Applied Physics Laboratory ABSTRACT We report observations of the Jupiter Trojan asteroid (3548) Eurybates and its satel- lite Queta with the Hubble Space Telescope and use these observations to perform an orbital fit to the system. Queta orbits Eurybates with a semimajor axis of 2350±11 km at a period of 82:46 ± 0:06 days and an eccentricity of 0:125 ± 0:009. From this orbit we derive a mass of Eurybates of 1:51 ± 0:03 × 1017 kg, corresponding to an estimated density of 1:1 ± 0:3 g cm−3, broadly consistent with densities measured for other Tro- jans, C-type asteroids in the outer main asteroid belt, and small icy objects from the Kuiper belt. Eurybates is the parent body of the only major collisional family among the Jupiter Trojans; its low density suggests that it is a typical member of the Tro- jan population. -

Multi-Target Low-Thrust Interplanetary Trajectory Design of DESTINY
a feasible trajectory. This is particularly more challenging for the PGC members, as their highly eccentric and inclined orbits would impose very narrow time windows of flyby opportuni- ties with very high relative velocities. In DESTINY+’s case, this is combined with low relative velocities at Earth escape and limited thrust capability of ion engines. Additionally, the spacecraft design imposes constraints on the trajectory, making the interplanetary trajectory design of DESTINY+ challenging altogether. The interplanetary trajectory design of DESTINY+ was pre- viously investigated by Sarli et al.10, 11) Sarli et al. (2015) presented ballistic transfer opportunities by solving Lambert’s problem and applying gravity-assist maneuvers by Earth and Mars for multiple asteroid visits to the PGC.10) In a more recent work, Sarli et al. (2017) computed low-thrust optimal trajecto- ries for Earth-Phaethon transfers only and presented potential targets for mission extension regardless of their relation to the PGC.11) (a) xy-plane Building on these works, the present study explores the opti- mal transfers between Earth and the PGC members by consid- ering low escape energy, limited thrust and mission constraints of DESTINY+. A large database of ballistic transfers for Earth-Phaethon (E1-P2), Phaethon-Earth (P2-E3) and Earth- Secondary Asteroid (2005UD, 1999YC) are generated. Can- didate low-thrust solutions for full mission sequence are iden- tified with a simple “minimum ∆V” criterion and C3-matching algorithm. Transfer opportunities are expanded as compared to Sarli et al. (2015) by the addition of low-thrust propulsion. The chosen initial conditions are then inputted to GALLOP in order to generate optimal solutions. -
Ice & Stone 2020
Ice & Stone 2020 WEEK 15: APRIL 5-11, 2020 Presented by The Earthrise Institute # 15 Authored by Alan Hale This week in history APRIL 5 6 7 8 9 10 11 APRIL 5, 1861: An amateur astronomer in New York, A.E. Thatcher, discovers a 9th-magnitude comet. Comet Thatcher was found to have an approximate orbital period of 415 years and is the parent comet of the Lyrid meteor shower, which peaks around April 22 each year. The Lyrids usually put on a modest display of less than 20 meteors per hour, but on occasion have produced much stronger displays, most recently in 1982. APRIL 5 6 7 8 9 10 11 APRIL 8, 1957: Comet Arend-Roland 1956h passes through perihelion at a heliocentric distance of 0.316 AU. This was one of the brighter comets of the mid-20th Century and is a future “Comet of the Week.” APRIL 8, 2024: The path of a total solar eclipse will cross north-central Mexico and the south-central and northeastern U.S. This may be my last, best chance to see an eclipse comet; I discuss these in a future “Special Topics” presentation. APRIL 5 6 7 8 9 10 11 APRIL 9, 1994: Radar bounce experiments conducted by the joint NASA/U.S. Defense Department Clementine spacecraft suggest the presence of water ice in permanently shadowed craters near the moon’s South Pole. This would be confirmed by NASA’sLunar Prospector mission in 1998. These experiments are discussed as part of a future “Special Topics” presentation. *There are no calendar entries for April 6 and 7. -

(Preprint) AAS 19-663 OPTIMIZATION of the LUCY INTERPLANETARY
(Preprint) AAS 19-663 OPTIMIZATION OF THE LUCY INTERPLANETARY TRAJECTORY VIA TWO-POINT DIRECT SHOOTING Jacob A. Englander∗ Donald H. Ellison† Ken Williams‡ James McAdams§ Jeremy M. Knittel¶ Brian Sutter‖ Chelsea Welch∗∗ Dale Stanbridge†† Kevin Berry‡‡ Lucy is NASA’s next Discovery-class mission and will explore the Trojan aster- oids in the Sun-Jupiter L4 and L5 regions. This paper details the design of Lucy’s interplanetary trajectory using a two-point direct shooting transcription, nonlinear programming, and monotonic basin hopping. These techniques are implemented in the Evolutionary Mission Trajectory Generator (EMTG), a trajectory optimization tool developed at NASA Goddard Space Flight Center. We present applications to the baseline trajectory design, Monte Carlo analysis, and operations. INTRODUCTION Lucy is NASA’s next Discovery-class planetary science mission. Lucy will launch in 2021 and will explore the bodies known as “Trojans” that orbit the Sun at the stable L4 and L5 points ahead and behind Jupiter. According to the Nice model of solar system formation, the Trojans may be remnants of the early solar system that were transported inward as the gas giants migrated outward [1]. When observed by telescope, the Trojans spectrally resemble Kuiper Belt object (KBO)s. Unlike KBOs, the Trojans are readily accessible and are therefore our best window back in time to see what the solar system originally looked like. Lucy will visit five of these objects: four at L4 and one, the binary pair Patroclus-Menoetius, at L5. This paper describes the optimization of the Lucy trajectory using a two-point direct shooting method in the Evolutionary Mission Trajectory Generator (EMTG) version 9, a modular, scalable- fidelity trajectory optimization tool. -

NASA's Deep Space Network: Current Status and the Future
Lecture 10.1: NASA’s Deep Space Network: Current Status and the Future В. Г. Турышев Jet Propulsion Laboratory, California Institute of Technology 4800 Oak Grove Drive, Pasadena, CA 91009 USA Государственный Астрономический Институт им. П.К. Штернберга Университетский проспект, дом 13, Москва, 119991 Россия Курс Лекций: «Современные Проблемы Астрономии» для студентов Государственного Астрономического Института им. П.К. Штернберга 7 февраля –23мая 2011 FUTURE OF DEEP SPACE NAVIGATION Outline • General consideration • Strategy of DSN evolution – List of current capabilities – Future needs • Principles of Deep Space Communications • Progress 1962-2004 • Mission examples: – Voyager mission to outer planets – Galileo to Jupiter – Cassini to Saturn – Odyssey to Mars • Concluding Remarks Deep Space Network Goldstone, California Goldstone, California Madrid, Spain Canberra, Australia FUTURE OF DEEP SPACE NAVIGATION Future’s NASA Navigation System Formation In-Situ Flying In-Situ Assets Ascent Assets Vehicles Pinpoint Landing Complementary, Supplementary Data Types DSN Array Low-Thrust, Low-Energy Advanced Trajectories Interferometric Autonomous Data Types Small-body Optical Proximity Navigation Operations FUTURE OF DEEP SPACE NAVIGATION Reference Set for Navigation Requirements (2005) Crew Exploration Vehicle (2008, Moon in 2020, Mars in 2030) Lunar South Pole Sample Return (2010) Human rating of deep space Going back to the Moon after 30 years, navigation capabilities, emphasis on but with more demanding requirements: risk-reduction; complementary and landing in deep craters or at the pole; supplementary navigation methods. autonomous 6-DOF GNC for landing It will evolve to enable the human and ascent. exploration of the Moon and Mars. Jupiter Icy Moons Orbiter (2015?) Low-thrust and low-energy Mars Telecom Orbiter (2009-cancel) navigation inside the Jovian Demonstrating autonomous optical system, requiring innovative navigation for rendezvous; gimbaled trajectory optimization and camera; providing enhanced in-situ automated on-board control.