Coastal Protection and Nearshore Evolution Under Sea Level Rise
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sea!Level!Rise!In!The!Pacific!Northwest!And! Northern!California! ! 2018! !
! ! ! ! Available!Science!Assessment!Process!(ASAP):!! Sea!Level!Rise!in!the!Pacific!Northwest!and! Northern!California! ! 2018! ! ! ! ! ! ! ! ! !! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! Cover!photos!(LBR)! Edmonds,(Washington((KJRSeattle(via(Wikimedia(Commons)( Whidbey(Island,(Puget(Sound((Hugh(Shipman,(Washington(Department(of(Ecology)( Nestucca(Bay(National(Wildlife(Refuge,(Oregon((Roy(W.(Lowe,(U.S.(Fish(and(Wildlife(Service)( Lanphere(Dunes,(Humboldt(Bay((Andrea(Pickart,(U.S.(Fish(and(Wildlife(Service)( !! ! ! Available!Science!Assessment!Process!(ASAP):!! Sea!Level!Rise!in!the!Pacific!Northwest!and! Northern!California! ! ! 2018! ! Final!Report! ! ! ! EcoAdapt!! ! ! ! ! ! ! Institute!for!Natural!Resources! PO!Box!11195!! ! ! ! ! ! 234!Strand!Hall! Bainbridge!Island,!WA!98110!! ! ! ! Corvallis,!OR!97331! ! ( For(more(information(about(this(report,(please(contact(Rachel(M.(Gregg(([email protected])( or(Lisa(Gaines(([email protected]).(( ( ! ! Recommended!Citation! Gregg(RM,(Reynier(W,(Gaines(LJ,(Behan(J((editors).(2018.(Available(Science(Assessment(Process( (ASAP):(Sea(Level(Rise(in(the(Pacific(Northwest(and(Northern(California.(Report(to(the(Northwest( Climate(Adaptation(Science(Center.(EcoAdapt((Bainbridge(Island,(WA)(and(the(Institute(for( Natural(Resources((Corvallis,(OR).( ( ( ! Project!Team! Rachel(M.(Gregg( CoVPI,(EcoAdapt( Lisa(Gaines( ( CoVPI,(Institute(for(Natural(Resources( Whitney(Reynier( EcoAdapt( Jeff(Behan( ( Institute(for(Natural(Resources( ( Scientific!Expert!Panel! Karen(Thorne( -
Feeder Bluff Mapping of Puget Sound, Coastal Geologic Services
Feeder Bluff Mapping of Puget Sound Prepared for: The Washington State Department of Ecology and Washington Department of Fish and Wildlife Prepared by: A.MacLennan1, J. W. Johannessen1, S. A. Williams1, W. Gerstel2, J. F. Waggoner1, and A. Bailey3 1Coastal Geologic Services, Inc, 2Qwg Applied Geology, and 3Sound GIS June 21, 2013 Publication Information Feeder Bluff Mapping of Puget Sound For the Washington Department of Ecology and the Washington Department of Fish and Wildlife Personal Services Agreement #C1200221 Washington Department of Ecology project manager: Hugh Shipman. Coastal Geologic Services project manager: Andrea MacLennan This project was supported by the U.S. Environmental Protection Agency (EPA) National Estuary Program (NEP) funding by means of a grant (#11‐1668) and Personal Services Agreement (#C1200221) administered by the Washington Department of Fish and Wildlife. Acknowledgements This work was supported by the many individuals that contributed to the development of the feeder bluff mapping and the overall advancement of coastal geomorphic studies in the Salish Sea, particularly Wolf Bauer, Professor Maury Schwartz, Ralph Keuler, and Hugh Shipman. Particular thanks goes out to the technical advisory team and reviewers of the quality assurance project plan including Tom Gries, Betsy Lyons, Ian Miller, Kathlene Barnhart, Steve Todd, Stephen Slaughter, Randy Carman, George Kaminsky, Isabelle Sarikhan, and Tim Gates. Additional thanks is expressed to those involved in the earliest feeder bluff mapping efforts that provided the foundation for the development of a Sound‐wide data set including: Whatcom, Island, San Juan, and Skagit County Marine Resources Committees, the Northwest Straits Foundation, Clallam County, the City of Bainbridge Island, King County Department of Natural Resources and Parks, Snohomish County Surface Water Management, Friends of the San Juans, and the Squaxin Island Tribe. -
Puget Sound Feeder Bluffs
Puget Sound Feeder Bluffs Coastal erosion as a sediment source and its implications for shoreline management April 2014 Publication No. 14-06-016 Template Puget Sound Feeder Bluffs Coastal erosion as a sediment source and its implications for shoreline management Hugh Shipman Washington Department of Ecology Olympia WA Andrea MacLennan Coastal Geologic Services Bellingham WA Jim Johannessen Coastal Geologic Services Bellingham WA Shorelands and Environmental Assistance Program Washington State Department of Ecology Olympia, Washington Publication and Contact Information This report is available on the Department of Ecology’s website at https://fortress.wa.gov/ecy/publications/SummaryPages/1406016.html For more information contact: Shorelands and Environmental Assistance Program P.O. Box 47600 Olympia, WA 98504-7600 360-407-6600 Washington State Department of Ecology - www.ecy.wa.gov o Headquarters, Olympia 360-407-6000 o Northwest Regional Office, Bellevue 425-649-7000 o Southwest Regional Office, Olympia 360-407-6300 o Central Regional Office, Yakima 509-575-2490 o Eastern Regional Office, Spokane 509-329-3400 Cover Photo: Eroding bluffs on the south side of Lily Point Marine Park, on Point Roberts in Whatcom County. Recommended citation: Shipman, H., MacLennan, A., and Johannessen, J. 2014. Puget Sound Feeder Bluffs: Coastal Erosion as a Sediment Source and its Implications for Shoreline Management. Shorelands and Environmental Assistance Program, Washington Department of Ecology, Olympia, WA. Publication #14-06-016. For special accommodations -

Nearshore Drift-Cell Sediment Processes And
Journal of Coastal Research 00 0 000–000 Coconut Creek, Florida Month 0000 Nearshore Drift-Cell Sediment Processes and Ecological Function for Forage Fish: Implications for Ecological Restoration of Impaired Pacific Northwest Marine Ecosystems David Parks†, Anne Shaffer‡*, and Dwight Barry§ †Washington Department of Natural Resources ‡Coastal Watershed Institute §Western Washington University 311 McCarver Road P.O. Box 2263 Huxley Program on the Peninsula Port Angeles, Washington 98362, U.S.A. Port Angeles, Washington 98362, U.S.A. Port Angeles, Washington 98362, U.S.A. [email protected] ABSTRACT Parks, D.; Shaffer, A., and Barry, D., 0000. Nearshore drift-cell sediment processes and ecological function for forage fish: implications for ecological restoration of impaired Pacific Northwest marine ecosystems. Journal of Coastal Research, 00(0), 000–000. Coconut Creek (Florida), ISSN 0749-0208. Sediment processes of erosion, transport, and deposition play an important role in nearshore ecosystem function, including forming suitable habitats for forage fish spawning. Disruption of sediment processes is often assumed to result in impaired nearshore ecological function but is seldom assessed in the field. In this study we observed the sediment characteristics of intertidal beaches of three coastal drift cells with impaired and intact sediment processes and compared the functional metrics of forage fish (surf smelt, Hypomesus pretiosus, and sand lance, Ammodytes hexapterus) spawning and abundance to define linkages, if any, between sediment processes -

Quantifying Short- to Long-Term Beach and Shoreline Changes in the Gold Beach, Nesika Beach, and Netarts Littoral Cells, Curry and Tillamook Counties, Oregon
State of Oregon Oregon Department of Geology and Mineral Industries Vicki S. McConnell, State Geologist OPEN-FILE REPORT O-13-07 OREGON BEACH SHORELINE MAPPING AND ANALYSIS PROGRAM: QUANTIFYING SHORT- TO LONG-TERM BEACH AND SHORELINE CHANGES IN THE GOLD BEACH, NESIKA BEACH, AND NETARTS LITTORAL CELLS, CURRY AND TILLAMOOK COUNTIES, OREGON TECHNICAL REPORT TO THE OREGON DEPARTMENT OF LAND CONSERVATION AND DEVELOPMENT by Jonathan C. Allan and Laura L. Stimely Oregon Department of Geology and Mineral Industries Coastal Field Office, 313 SW 2nd Street, Suite D, Newport, OR 97365 G E O L O G Y F A N O D T N M I E N M E T R R A A L P I E N D D U N S O T G R E I R E S O 1937 2013 Quantifying Short- to Long-Term Beach and Shoreline Changes in the Gold Beach, Nesika Beach, and Netarts Littoral Cells NOTICE This product is for informational purposes and may not have been prepared for or be suitable for legal, engineering, or surveying purposes. Users of this information should review or consult the primary data and information sources to ascertain the usability of the information. This publication cannot substitute for site specific investigations by qualified practitioners. Site specific data may give results that differ from the results shown in the publication. Cover photograph: Looking north along the coastal bluffs of Nesika Beach, Curry County. Erosion of the Nesika Beach bluffs reflects some of the highest rates of coastal retreat observed on the Oregon coast. (Photo by J. -
Soft Shoreline Stabilization Guidance
Soft Shoreline Stabilization Shoreline Master Program Planning and Implementation Guidance March 2014 Publication no.14-06-009 This Page intentionally left Blank-Back Cover Soft Shoreline Stabilization Shoreline Master Program Planning and Implementation Guidance by: Kelsey Gianou, M.S. Shorelands and Environmental Assistance Program Washington State Department of Ecology Olympia, Washington Publication and Contact Information This report is available on Ecology’s website at https://fortress.wa.gov/ecy/publications/SummaryPages/1406009.html For more information, contact: Shorelands and Environmental Assistance Program Washington Department of Ecology P.O. Box 47600 Olympia, WA 98504-7600 360-407-6600 Washington State Department of Ecology - www.ecy.wa.gov o Headquarters, Olympia 360-407-6000 o Northwest Regional Office, Bellevue 425-649-7000 o Southwest Regional Office, Olympia 360-407-6300 o Central Regional Office, Yakima 509-575-2490 o Eastern Regional Office, Spokane 509-329-3400 Cover photo: Salisbury Point Park, photo by Kelsey Gianou. This report should be cited as: Gianou, K. 2014. Soft Shoreline Stabilization: Shoreline Master Program Planning and Implementation Guidance. Shorelands and Environmental Assistance Program, Washington Department of Ecology, Olympia, WA. Publication no. 14-06-009. For special accommodations or documents in alternate format, call 360-407-600, 711 (relay service), or 877-833-6341 (TTY). Table of Contents Page Table of Contents ............................................................................................................................ -

City of East Wenatchee, Washington Ordinance No. 2021-14 An
City of East Wenatchee, Washington Ordinance No. 2021-14 An Ordinance of the City of East Wenatchee amending Chapters 1-9 and Appendix H of the East Wenatchee Shoreline Master Program in accordance with the Periodic Review and Update Cycle mandated by RCW 90.58.080, amending Ordinance 2008- 09 and Ordinance 2009-18, declaring the periodic review and update process as complete, containing a severability clause, and establishing an effective date. Una Ordenanza de la Ciudad de East Wenatchee que enmienda los Capítulos 1-9 y el Apéndice H del Programa Maestro de East Wenatchee Shoreline de acuerdo con el Ciclo de Revisión y Actualización Periódica ordenado por RCW 90.58.080, que enmienda la Ordenanza 2008-09 y la Ordenanza 2009-18, declarar que el proceso de revisión y actualización periódica está completo, que contiene una cláusula de divisibilidad y que establece una fecha de vigencia. 1. Alternate format. 1.1. Para leer este documento en otro formato (español, Braille, leer en voz alta, etc.), póngase en contacto con el vendedor de la ciudad al [email protected], al (509) 884-9515 o al 711 (TTY). 1.2. To read this document in an alternate format (Spanish, Braille, read aloud, etc.), please contact the City Clerk at alternateformat@east- wenatchee.com, at (509) 884-9515, or at 711 (TTY). 2. Recitals. 2.1. The City of East Wenatchee (“City”) is a non-charter code city, duly incorporated and operating under the laws of the State of Washington. 2.2. The Washington State Legislature passed the Shoreline Management Act (SMA) in June 1971, and it was approved by voters in a public initiative in 1972. -
Bainbridge Island Current and Historic Coastal Geomorphic/Feeder Bluff Mapping
Bainbridge Island Current and Historic Coastal Geomorphic/Feeder Bluff Mapping Prepared for: City of Bainbridge Island Planning and Community Development Prepared by: Coastal Geologic Services Inc. Andrea MacLennan, MS Jim Johannessen, MS, LEG and Stephanie Williams, BS Bellingham, WA April 22, 2010 COASTAL GEOLOGIC SERVICES, INC. TABLE OF CONTENTS Table of Tables ...............................................................................................................................ii Table of Figures..............................................................................................................................ii INTRODUCTION ..............................................................................................................................1 Purpose........................................................................................................................................ 1 Background.................................................................................................................................. 1 Puget Sound and North Straits Bluffs and Beaches ................................................................ 1 Net Shore-drift .......................................................................................................................... 2 Shore Modifications.................................................................................................................. 3 Coastal Processes and Nearshore Habitat ............................................................................. -
RSN 06-04 Dynamic Revetments.Pub
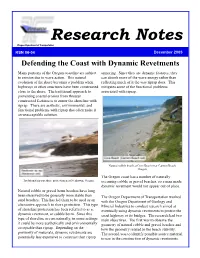
Research Notes Oregon Department of Transportation RSN 06-04 December 2005 Defending the Coast with Dynamic Revetments Many portions of the Oregon coastline are subject armoring. Since they are dynamic features, they to erosion due to wave action. This natural can absorb more of the wave energy rather than evolution of the shore becomes a problem when reflecting much of it the way riprap does. This highways or other structures have been constructed mitigates some of the functional problems close to the shore. The traditional approach to associated with riprap. preventing coastal erosion from threaten constructed features is to armor the shoreline with riprap. There are aesthetic, environmental, and functional problems with riprap that often make it an unacceptable solution. Natural cobble beach at Cove Beach near Cannon Beach, Oregon. The Oregon coast has a number of naturally Traditional rip rap shore protection near Neskowin, Oregon. occurring cobble or gravel beaches, so a man made dynamic revetment would not appear out of place. Natural cobble or gravel berm beaches have long been observed to be generally more stable than The Oregon Department of Transportation worked sand beaches. This has led them to be used as an with the Oregon Department of Geology and alternative approach to shore protection. This type Mineral Industries to conduct research aimed at of shoreline protection has been referred to as a, eventually using dynamic revetments to protect the dynamic revetment, or cobble berm. Since this coast highway or its bridges. The research had two type of shoreline occurs naturally, in some settings main objectives. The first was to observe the it could be more aesthetically and environmentally geometry of natural cobble and gravel beaches and acceptable than riprap. -
Alternative Bank Protection Methods for Puget Sound Shorelines
Alternative Bank Protection Methods for Puget Sound Shorelines Ian Zelo, Hugh Shipman, and Jim Brennan May, 2000 Ecology Publication # 00-06-012 Printed on recycled paper Alternative Bank Protection Methods for Puget Sound Shorelines Ian Zelo School of Marine Affairs University of Washington Hugh Shipman Washington Department of Ecology Jim Brennan King County Department of Natural Resources May, 2000 Shorelands and Environmental Assistance Program Washington Department of Ecology Olympia, Washington Publication # 00-06-012 This project was funded by EPA's Puget Sound Estuary Program Technical Studies, FY 97, Grant # CE-990622-02, and administered by the Puget Sound Water Quality Action Team Recommended bibliographic citation: Zelo, Ian, Hugh Shipman, and Jim Brennan, 2000, Alternative Bank Protection Methods for Puget Sound Shorelines, prepared for the Shorelands and Environmental Assistance Program, Washington Department of Ecology, Olympia, Washington, Publication # 00-06- 012. ii Acknowledgements This report is the result of many conversations. Many people took the time to speak with us about different aspects of the project. They helped identify sites and set up field visits, supplied documents, explained aspects of project planning and construction, and commented on earlier versions of the report. We thank the following individuals: Don Allen, Seattle Parks SW District -- Cindy Barger, U.S. Army Corps of Engineers -- Bart Berg, Bart Berg Landscape, Bainbridge Island -- Ginny Broadhurst, Puget Sound Water Quality Action Team -- Bob -
Feeder Bluff Mapping for SMP Update
Clallam County Feeder Bluff Mapping for SMP Update For: ESA/ Clallam County December 2012 By: Jim Johannessen, LEG, MS & Andrea MacLennan, MS Coastal Geologic Svcs, Bellingham, WA www.coastalgeo.com Outline Objectives Previous work Geomorphic processes Methods Feeder bluff results Study Area Objectives Definitively map coastal drift sediment sources (feeder bluffs), “neutral” areas (transport zones), & accretion shoreforms-in N and E County Review and modify drift cell mapping if needed Mapping within drift cells only Littoral (drift) cells = Net shore-drift cells Determined by wave exposure & shoreline configuration Represent independent sediment compartments Over 800 cells in Puget Sound May share Divergence Zones w/ adjacent cells Eroding bluffs (feeder bluffs) are critical components to each cell Divergence Zone West Clallam County Current Net shore-drift (“drift cells”) Previous net shore- drift mapping: Coastal Zone Atlas of WA – (1978-79) East Clallam County Bubnick, through Schwartz of WWU, Shell 1986 CGS 2007 (for USACE) CGS 2011 32 drift cells = 90 miles 24 NAD (no appreciable drift) areas Other Previous Clallam County Work Previous Mapping—Other: WDNR Shorezone database – Dethier habitat classification and Howe’s geomorphic classification. Emphasizes substrate and intertidal morphology rather than larger scale processes. PSNERP Change Analysis Mapping – Hugh Shipman’s typology in current and historic (circa 1850-80) conditions. Coarse scale, shoretypes lumped together, sediment source function not characterized. Coastal -

Strategies for Shore Protection: the Construction of a Cobble Berm and Artificial Dune in an Oregon State Park
Paul D. Komar and Jonathan C. Allan 117 “Design with Nature” Strategies for Shore Protection: The Construction of a Cobble Berm and Artificial Dune in an Oregon State Park Paul D. Komar1 and Jonathan C. Allan2 Introduction The book “Design with Nature” was written by the Scotsman Ian McHarg, a town planner and landscape architect. With the advances in the science of ecology during the 1960s, the focus of his book (published in 1969) concerned what constitutes a natural, sustainable environment, with one chapter having been devoted to the preservation of barrier islands. On the basis of our investigations of the designs of environmentally compatible shore‑protection structures as substitutes for conventional armor‑stone revetments or seawalls, we have expanded on McHarg’s concept to include the idea that we can learn from nature in the search for improved ways to protect our shores from the extremes of waves Figure 1. Natural cobble beach on the shore of Oceanside, Oregon, which has and tides (Komar, 2007). Our goal is to protected the sea cliff from erosion, evident in its extensive cover of vegetation. design structures that are more natural in appearance, while at the same time providing an acceptable degree of protection to coastal presence of a natural cobble beach can provide a significant properties. degree of protection to ocean‑front properties. Figure 1 shows Our interest in this philosophy was initiated by the an example of such a beach on the shore of the community erosion experienced in a state park on the Oregon coast, of Oceanside, where the absence of erosion is evident in the where a high protective dune ridge had been eroded away, heavy vegetation that covers the sea cliff, with photos dating followed by a major storm in 1999 that washed through the back to the early 20th century being essentially identical.