Human Assistant Robotics in Japan
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Martine Rothblatt
For more information contact us on: North America 855.414.1034 International +1 646.307.5567 [email protected] Martine Rothblatt Topics Activism and Social Justice, Diversity and Inclusion, Health and Wellness, LGBTQIA+, Lifestyle, Science and Technology Travels From Maryland Bio Martine Rothblatt, Ph.D., MBA, J.D. is one of the most exciting and innovative voices in the world of business, technology, and medicine. She was named by Forbes as one of the "100 Greatest Living Business Minds of the past 100 years" and one of America's Self-Made Women of 2019. After graduating from UCLA with a law and MBA degree, Martine served as President & CEO of Dr. Gerard K. O’Neill’s satellite navigation company, Geostar. The satellite system she launched in 1986 continues to operate today, providing service to certain government agencies. She also created Sirius Satellite Radio in 1990, serving as its Chairman and CEO. In the years that followed, Martine Rothblatt’s daughter was diagnosed with life-threatening pulmonary hypertension. Determined to find a cure, she left the communications business and entered the world of medical biotechnology. She earned her Ph.D. in medical ethics at the Royal London College of Medicine & Dentistry and founded the United Therapeutics Corporation in 1996. The company focuses on the development and commercialization of page 1 / 4 For more information contact us on: North America 855.414.1034 International +1 646.307.5567 [email protected] biotechnology in order to address the unmet medical needs of patients with chronic and life-threatening conditions. Since then, she has become the highest-paid female CEO in America. -

Cybernetic Human HRP-4C: a Humanoid Robot with Human-Like Proportions
Cybernetic Human HRP-4C: A humanoid robot with human-like proportions Shuuji KAJITA, Kenji KANEKO, Fumio KANEIRO, Kensuke HARADA, Mitsuharu MORISAWA, Shin’ichiro NAKAOKA, Kanako MIURA, Kiyoshi FUJIWARA, Ee Sian NEO, Isao HARA, Kazuhito YOKOI, Hirohisa HIRUKAWA Abstract Cybernetic human HRP-4C is a humanoid robot whose body dimensions were designed to match the average Japanese young female. In this paper, we ex- plain the aim of the development, realization of human-like shape and dimensions, research to realize human-like motion and interactions using speech recognition. 1 Introduction Cybernetics studies the dynamics of information as a common principle of com- plex systems which have goals or purposes. The systems can be machines, animals or a social systems, therefore, cybernetics is multidiciplinary from its nature. Since Norbert Wiener advocated the concept in his book in 1948[1], the term has widely spreaded into academic and pop culture. At present, cybernetics has diverged into robotics, control theory, artificial intelligence and many other research fields, how- ever, the original unified concept has not yet lost its glory. Robotics is one of the biggest streams that branched out from cybernetics, and its goal is to create a useful system by combining mechanical devices with information technology. From a practical point of view, a robot does not have to be humanoid; nevertheless we believe the concept of cybernetics can justify the research of hu- manoid robots for it can be an effective hub of multidiciplinary research. WABOT-1, -

Robot Theatre Marek Perkowski 1
Towards Robot Theatre Marek Perkowski 1. History of robot theatre 2. Modern robot theatre 3. Robot theatre at PSU 4. Models of robot theatre 5. Research topics on Robot Theatre 6. Future Robot Theatre History of Robot Theatre From antiquity until 1996 Heron’s Book Automata Robot Theatre of Hero • A collection of constructions called miracles of Alexandria (thaumata) for temples. • Heron describes automatic rotating objectives, noise such as thunder, automatic opening doors. • Philon from Byzanz describes the existence of automata in his book Mechaniki syntaxis, that includes pneumatic apparatus and automatic astronomical devices as early as 300 BC. Albertus Magnus and his robot head Albertus is recorded as having made a mechanical automaton in the form of a brass head that would answer questions put to it. Knight of Leonardo Da Vinci 1. Leonardo's robot refers to a humanoid automaton designed by Leonardo da Vinci around the year 1495. 2. The design notes for the robot appear in sketchbooks that were rediscovered in the 1950s. 3. It is not known whether or not an attempt was made to build the device during da Vinci's lifetime. 4. Since the discovery of the sketchbook, the robot has been built faithfully based on Leonardo's design; this proved it was fully functional. Duck of Vaucanson • The Canard Digérateur, or Digesting Duck, was an automaton in the form of a duck, created by Jacques de Vaucanson in 1739. • The mechanical duck appeared to have the ability to eat kernels of grain, and to metabolize and defecate them Constructed and unveiled in 1770 by Wolfgang von Turk of Kempelen Kempelen (1734–1804) to impress the Empress Maria Theresa • The Turk was in fact a mechanical illusion that allowed a human chess master hiding inside to operate the machine. -

History of Robotics: Timeline
History of Robotics: Timeline This history of robotics is intertwined with the histories of technology, science and the basic principle of progress. Technology used in computing, electricity, even pneumatics and hydraulics can all be considered a part of the history of robotics. The timeline presented is therefore far from complete. Robotics currently represents one of mankind’s greatest accomplishments and is the single greatest attempt of mankind to produce an artificial, sentient being. It is only in recent years that manufacturers are making robotics increasingly available and attainable to the general public. The focus of this timeline is to provide the reader with a general overview of robotics (with a focus more on mobile robots) and to give an appreciation for the inventors and innovators in this field who have helped robotics to become what it is today. RobotShop Distribution Inc., 2008 www.robotshop.ca www.robotshop.us Greek Times Some historians affirm that Talos, a giant creature written about in ancient greek literature, was a creature (either a man or a bull) made of bronze, given by Zeus to Europa. [6] According to one version of the myths he was created in Sardinia by Hephaestus on Zeus' command, who gave him to the Cretan king Minos. In another version Talos came to Crete with Zeus to watch over his love Europa, and Minos received him as a gift from her. There are suppositions that his name Talos in the old Cretan language meant the "Sun" and that Zeus was known in Crete by the similar name of Zeus Tallaios. -

Theory of Mind for a Humanoid Robot
Theory of Mind for a Humanoid Robot Brian Scassellati MIT Artificial Intelligence Lab 545 Technology Square – Room 938 Cambridge, MA 02139 USA [email protected] http://www.ai.mit.edu/people/scaz/ Abstract. If we are to build human-like robots that can interact naturally with people, our robots must know not only about the properties of objects but also the properties of animate agents in the world. One of the fundamental social skills for humans is the attribution of beliefs, goals, and desires to other people. This set of skills has often been called a “theory of mind.” This paper presents the theories of Leslie [27] and Baron-Cohen [2] on the development of theory of mind in human children and discusses the potential application of both of these theories to building robots with similar capabilities. Initial implementation details and basic skills (such as finding faces and eyes and distinguishing animate from inanimate stimuli) are introduced. I further speculate on the usefulness of a robotic implementation in evaluating and comparing these two models. 1 Introduction Human social dynamics rely upon the ability to correctly attribute beliefs, goals, and percepts to other people. This set of metarepresentational abilities, which have been collectively called a “theory of mind” or the ability to “mentalize”, allows us to understand the actions and expressions of others within an intentional or goal-directed framework (what Dennett [15] has called the intentional stance). The recognition that other individuals have knowl- edge, perceptions, and intentions that differ from our own is a critical step in a child’s development and is believed to be instrumental in self-recognition, in providing a perceptual grounding during language learning, and possibly in the development of imaginative and creative play [9]. -

Mapping the Evolution of the Robotics Industry: a Cross-Country Comparison
MAPPING THE EVOLUTION OF THE ROBOTICS INDUSTRY: A CROSS-COUNTRY COMPARISON Eric Estolatan, Aldo Geuna, Marco Guerzoni, and Massimiliano Nuccio INNOVATION POLICY LAB WORKING PAPER SERIES 2018-01 Abstract Industry 4.0 may be regarded as an emerging approach to the adoption of next-generation robotics for industrial applications. Our study sheds light on the current state of robotics, with a particular focus on robots for industrial applications. The research combines publicly-available information from company press releases, news articles, peer-reviewed journals and trade and industry reports. The paper is organized in four sections. Section 1 discusses some definitions of robotics and robotics sub- classes, and various robotics classifications. Sections 2 and 3 provide a snapshot of demand and supply of robotics, and offers some insights into select regional markets and global technological trends. Section 4 describes the challenges and opportunities surrounding robotics and Industry 4.0, and the future impact of these technologies. JEL Codes:O33, L52, L63 Keywords: robotics, Industry 4.0, cyber-physical systems, industrial robots, co-bots Acknowledgements The authors would like to thank ASPEN Institute Italia for the reference to some data from the report: Digital disruption and the transformation of Italian manufacturing by Geuna A., Guerzoni, M., Nuccio M., Pammolli F. and Rungi A. (2017) available at: https://www.aspeninstitute.it/aspenia- online/article/digital-disruption-and-manufacturing-transformation-italian-case-study 2 1. Introduction: the rise of cyber-physical systems Digital technology has the potential to re-shape current industrial processes at a magnitude comparable to previous industrial revolutions. The first one which occurred the XIX century was characterized by steam and water; the second at the beginning of the XX century was related to electricity and the moving assembly line, which steered mass production; with the third revolution of the 1980s we shift from analog to digital technologies. -
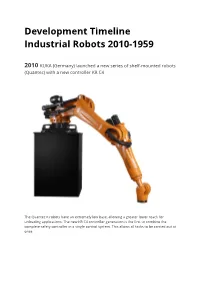
Development Timeline Industrial Robots 2010-1959
Development Timeline Industrial Robots 2010-1959 2010 KUKA (Germany) launched a new series of shelf-mounted robots (Quantec) with a new controller KR C4 The Quantec K robots have an extremely low base, allowing a greater lower reach for unloading applications. The new KR C4 controller generation is the first to combine the complete safety controller in a single control system. This allows all tasks to be carried out at once. 2009 ABB, Sweden, launched the smallest multipurpose industrial robot, IRB120 ABB's smallest ever multipurpose industrial robot weighs just 25kg and can handle a payload of 3kg (4kg for vertical wrist) with a reach of 580mm. 2009 Yaskawa Motoman, Japan, introduces control system to sync up to 8 robots Yaskawa Motoman, Japan, introduced the improved robot control system (DX100) which provided the fully synchronized control of eight robots, up to 72 axis. I/O devices and communication protocols. Dynamic interference zones protect robot arm and provide advanced collision avoidance. 2008 FANUC, Japan, launched a new heavy duty robot with a payload of almost 1,200 kg "The M-2000iA is the world's largest and strongest six-axis robot," said Rich Meyer, product manager, Fanuc Robotics . "It has the longest reach and the strongest wrist surpassing all other six-axis robots available today. The wrist strength sets a record, but more importantly, allows our customers to move large heavy parts a great distance with maximum stability." 2007 With the first systems realized in 2006, Reis Robotics became market leader for photovoltaic -

Ethics and Robotics. a First Approach1
ETHICS AND ROBOTICS. A FIRST APPROACH1. RAFAEL DE ASÍS ROIG2 Abstract: Clearly, technical and scientific progress and moral progress do not necessarily go hand in hand. Therefore, this article encourages reflection on the new ethical challenges posed by such developments and, in particular, by robotics, a field that has developed greatly in recent decades and that has led to possibilities unimaginable until recently. Thus, the author examines here the so-called roboethics, its content, the specific fields it addresses –such as social relations and moral agency of robots–, as well as the different approaches and views on these issues. Keywords: Ethics, robotics, moral agent, human rights Contents: I. INTRODUCTION; II. ROBOTICS; III. ROBOETHICS. I. INTRODUCTION In the 20th and 21st centuries there have been major advances in both the scientific and technical field. The first one has been named the science century. In this regard, it has been claimed that the first half of the 20th century focused on Physics whilst the second half on Biology, Genetics and Computer Science (Rifkin 1998: p. 20). As for the 21st century until now is characterised by the rise of Neuroscience and Nanotechnology as well as by advances in the field of Robotics (in connection with the other areas but especially to I.T). However, despite all these advances, poverty, hunger and dissatisfaction regarding rights still persist. It is not surprising that Th. Pogge commences his book World Poverty and Human Rights examining how it is possible that extreme poverty affects half of humanity despite the enormous economic and technological progress, and how it is possible that the distribution of scientific and technological benefits is so uneven (Pogge 2002). -

Exhibition Guide
The Robot Revolution Has BegunBegun - Toward Heartwarming Society Society Exhibition Guide Date Nov. 29(Wed) Dec. 2(Sat), 2017 Venue Tokyo Big Sight East Hall Organizers: Japan Robot Association (JARA), THE NIKKAN KOGYO SHIMBUN, LTD. A4_17iREX_annai_E.indd 2 2017/02/20 14:04:13 Greeting RT The Robot Revolution Has Begun Robot Technology - Toward Heartwarming Society Robot technology has greatly contributed to the development of manufacturing in Japan, expanding its scope of application from production sites to our daily lives while continuing the challenge to address various issues, such as the declining birthrate and aging population, decrepit infrastructure and disaster response. The International Robot Exhibition 2017 will be held under the theme, “The Robot Revolution Has Begun –Toward Heartwarming Society-” with an aspiration to have people and robots coexist and collaborate in order to create a more people-friendly society. The latest robot technology and products from Japan and abroad will be presented during the exhibition together with next-generation technology such as AI, big data, and networks to facilitate more exchanges in technology and business talks. We hope that you will take this opportunity to participate in the exhibition. Japan Robot Association (JARA) © UDAGAWA YASUHITO 1998 THE NIKKAN KOGYO SHIMBUN, LTD. Features of the International Robot Exhibition One of the World’s Largest Robot Trade Shows The International Robot Exhibition first held in 1974, has since been held once every two years and will mark its 22nd exhibition this year. In the last exhibition held in 2015, the number of exhibitors was 446 companies and organizations, and the number of booths reached 1,882 which is the largest number ever. -

Technological Enhancement and Criminal Responsibility1
THIS VERSION DOES NOT CONTAIN PAGE NUMBERS. PLEASE CONSULT THE PRINT OR ONLINE DATABASE VERSIONS FOR PROPER CITATION INFORMATION. ARTICLE HUMANS AND HUMANS+: TECHNOLOGICAL ENHANCEMENT AND CRIMINAL RESPONSIBILITY1 SUSAN W. BRENNER2 I. INTRODUCTION [G]radually, the truth dawned on me: that Man had not remained one species . .3 It has been approximately 30,000 years since our species—Homo sapiens sapiens—shared the earth with another member of the genus Homo.4 I note 1 It was only after I decided to use Humans+ as part of the title for this article that I discovered the very similar device used by the transhumanist organization, Humanity+. See Mission, HUMANITY PLUS, http://humanityplus.org/about/mission/ (last visited Feb. 25, 2013). 2 NCR Distinguished Professor of Law & Technology, University of Dayton School of Law, Dayton, Ohio, USA. Email: [email protected]. 3 H.G. WELLS, THE TIME MACHINE 59 (Frank D. McConnell ed. 1977). 4 See GRAHAM CONNAH, FORGOTTEN AFRICA: AN INTRODUCTION TO ITS ARCHAEOLOGY 7–16 (2004) (supporting emergence of genus Homo in Africa); CHRIS GOSDEN, PREHISTORY: A VERY SHORT INTRODUCTION xiv–xv, 39–42 (2003) (summarizing rise of Homo sapiens sapiens). “Taxonomy,” or “the study of classification,” involves the process of sorting plants and animals into categories, including species. STEPHEN JAY GOULD, EVER SINCE DARWIN: REFLECTIONS IN NATURAL HISTORY 231 (1977). The species Homo sapiens includes Homo sapiens sapiens (modern humans) as well as several “archaic” members of the species. See, e.g., William Howells, Getting Here: The Story of Human Evolution 122– 23 (Washington, DC: Compass Press 1993). See also R.A. -

Assistive Humanoid Robot MARKO: Development of the Neck Mechanism
MATEC Web of Conferences 121, 08005 (2017) DOI: 10.1051/ matecconf/201712108005 MSE 2017 Assistive humanoid robot MARKO: development of the neck mechanism Marko Penčić1,*, Maja Čavić1, Srđan Savić1, Milan Rackov1, Branislav Borovac1, and Zhenli Lu2 1Faculty of Technical Sciences, University of Novi Sad, TrgDositejaObradovića 6, 21000 Novi Sad, Serbia 2School of Electrical Engineering and Automation, Changshu Institute of Technology, Hushan Road 99, 215500 Changshu, People's Republic of China Abstract.The paper presents the development of neck mechanism for humanoid robots. The research was conducted within the project which is developing a humanoid robot Marko that represents assistive apparatus in the physical therapy for children with cerebral palsy.There are two basic ways for the neck realization of the robots. The first is based on low backlash mechanisms that have high stiffness and the second one based on the viscoelastic elements having variable flexibility. We suggest low backlash differential gear mechanism that requires small actuators. Based on the kinematic-dynamic requirements a dynamic model of the robots upper body is formed. Dynamic simulation for several positions of the robot was performed and the driving torques of neck mechanism are determined.Realized neck has 2 DOFs and enables movements in the direction of flexion-extension 100°, rotation ±90° and the combination of these two movements. It consists of a differential mechanism with three spiral bevel gears of which the two are driving and are identical, and the third one which is driven gear to which the robot head is attached. Power transmission and motion from the actuators to the input links of the differential mechanism is realized with two parallel placed gear mechanisms that are identical.Neck mechanism has high carrying capacity and reliability, high efficiency, low backlash that provide high positioning accuracy and repeatability of movements, compact design and small mass and dimensions. -

1 Robot Visions
1 Robot Visions Our dream is to create a society where it is nothing special for people to live together with robots. Akifumi Tamaoki beginnings For much of my childhood in Kodaira, a suburban community west of Tokyo,1 I had to watch television at our neighbors’ homes. We only acquired a black-and-white set in 1964 to watch the Summer Olympics, by which time the fields and chestnut orchards surrounding our house were being razed by tract-home developers and the gravel roads paved. Our neighbors had bought their sets to watch the wedding of Crown Prince (now Emperor) Akihito (b. 1933) and Sho–da Michiko (b. 1934) in April 1959. By 1964, nearly half of the roughly 25 million households in Japan owned a television, the wealthier among them a color model.2 Once we had a TV, I began to watch two cartoons that starred robots: Tetsuwan Atomu (Astro Boy) and Tetsujin 28 [Niju–hachi]-go (Ironman 28, aka Gigantor) (figure 1).3 Both were preceded by comic book versions and broadcast on Fuji TV from 1963 to 1966. Gigantor is remotely con- trolled by a ten-year-old boy detective whose father created the robot. The boy and the robot share a deep emotional bond that underscores the familial aspects of real-world human–robot relations in Japan, a theme I will reiterate in each chapter. I discuss Astro Boy at length in chapters 4 1 Robertson-Robo Sapiens japanicus.indd 1 17/07/17 3:54 PM 2 robot visions Figure 1. Tetsuwan Atomu (Astro Boy).