Orin(Open Robot Interface for the Network)の概要
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Defendants and Auto Parts List
Defendants and Parts List PARTS DEFENDANTS 1. Wire Harness American Furukawa, Inc. Asti Corporation Chiyoda Manufacturing Corporation Chiyoda USA Corporation Denso Corporation Denso International America Inc. Fujikura America, Inc. Fujikura Automotive America, LLC Fujikura Ltd. Furukawa Electric Co., Ltd. G.S. Electech, Inc. G.S. Wiring Systems Inc. G.S.W. Manufacturing Inc. K&S Wiring Systems, Inc. Kyungshin-Lear Sales And Engineering LLC Lear Corp. Leoni Wiring Systems, Inc. Leonische Holding, Inc. Mitsubishi Electric Automotive America, Inc. Mitsubishi Electric Corporation Mitsubishi Electric Us Holdings, Inc. Sumitomo Electric Industries, Ltd. Sumitomo Electric Wintec America, Inc. Sumitomo Electric Wiring Systems, Inc. Sumitomo Wiring Systems (U.S.A.) Inc. Sumitomo Wiring Systems, Ltd. S-Y Systems Technologies Europe GmbH Tokai Rika Co., Ltd. Tram, Inc. D/B/A Tokai Rika U.S.A. Inc. Yazaki Corp. Yazaki North America Inc. 2. Instrument Panel Clusters Continental Automotive Electronics LLC Continental Automotive Korea Ltd. Continental Automotive Systems, Inc. Denso Corp. Denso International America, Inc. New Sabina Industries, Inc. Nippon Seiki Co., Ltd. Ns International, Ltd. Yazaki Corporation Yazaki North America, Inc. Defendants and Parts List 3. Fuel Senders Denso Corporation Denso International America, Inc. Yazaki Corporation Yazaki North America, Inc. 4. Heater Control Panels Alps Automotive Inc. Alps Electric (North America), Inc. Alps Electric Co., Ltd Denso Corporation Denso International America, Inc. K&S Wiring Systems, Inc. Sumitomo Electric Industries, Ltd. Sumitomo Electric Wintec America, Inc. Sumitomo Electric Wiring Systems, Inc. Sumitomo Wiring Systems (U.S.A.) Inc. Sumitomo Wiring Systems, Ltd. Tokai Rika Co., Ltd. Tram, Inc. 5. Bearings Ab SKF JTEKT Corporation Koyo Corporation Of U.S.A. -

Orin2 Programming Guide PDF Download
ORiN 2 programming guide - 1 - ORiN2 Programming guide Version 1.0.19.0 June 18, 2019 [Remarks] Some items might not be installed depending on the package you have. ORiN Forum DENSO WAVE Inc. ORiN 2 programming guide - 2 - [Revision history] Date Version Content 2005-05-09 1.0.0.0 First edition. 2006-08-21 1.0.1.0 Add the way to register CAO RCW into GAC under .NET framework 2.0. 2007-04-23 1.0.2.0 ORiN Installer registers CAO and CaoSQL RCW into GAC. 2008-07-16 1.0.3.0 Add some descriptions 2009-06-12 1.0.4.0 Add Import and Export commands to save settings. 2009-07-31 1.0.5.0 Add the way to register CAO RCW into GAC under .NET framework 2.0. 2010-02-10 1.0.6.0 Add description on LabVIEW 2010-06-08 1.0.7.0 Add the way to confirm an installation state of ORiN2 SDK. 2011-04-27 1.0.8.0 Add a sample code in C#. 2011-12-22 1.0.9.0 Add an error code. 2012-07-10 1.0.10.0 Add an error code. 2012-08-24 1.0.11.0 Modify an error code 2012-09-07 1.0.12.0 Modify an error code 2014-01-20 1.0.13.0 Add an error code. Add an integration into Visual Studio 2014-09-22 1.0.14.0 Add an error code. 2015-11-04 1.0.15.0 Add SysLog output of CAO log. -

Notice of Hearing in Canadian Auto Parts Class Actions- Long
NOTICE OF HEARING IN CANADIAN AUTO PARTS PRICE-FIXING CLASS ACTIONS If you bought or leased, directly or indirectly, a new or used Automotive Vehicle or certain automotive parts, since January 1998, you should read this notice carefully. It may affect your legal rights. A. WHAT IS A CLASS ACTION? A class action is a lawsuit filed by one person on behalf of a large group of people. B. WHAT ARE THESE CLASS ACTIONS ABOUT? Class actions have been started in Canada claiming that many companies participated in conspiracies to fix the prices of automotive parts sold in Canada and/or sold to manufacturers for installation in Automotive Vehicles1 sold in Canada. This notice is about class actions relating to the following automotive parts (the “Relevant Parts”): Part Description2 Class Period Air Conditioning Air Conditioning Systems are systems that cool the January 1, 2001 to Systems interior environment of an Automotive Vehicle and are December 10, 2019 part of an Automotive Vehicle’s thermal system. An Air Conditioning System may include, to the extent included in the relevant request for quotation, compressors, condensers, HVAC units (blower motors, actuators, flaps, evaporators, heater cores, and filters embedded in a plastic housing), control panels, sensors, and associated hoses and pipes. Air Flow Meters Air Flow Meters, otherwise known as a mass air flow January 1, 2000 to sensors, measure the volume of air flowing into March 20, 2017 combustion engines in Automotive Vehicles, that is, how much air is flowing through a valve or passageway. The Air Flow Meter provides information to the Automotive Vehicle’s electronic control unit in order to ensure that the proper ratio of fuel to air is being injected into the engine. -

Renesas Electronics Announces Share Issue Through Third-Party Allotment, and Change in Major Shareholders, Largest Shareholder W
Renesas Electronics Announces Share Issue through Third-Party Allotment, and Change in Major Shareholders, Largest Shareholder who is a Major Shareholder, Parent Company and Other Related Companies TOKYO, Japan, December 10, 2012 – Renesas Electronics Corporation (TSE: 6723, hereafter “Renesas” or “the Company”), a premier supplier of advanced semiconductor solutions, at a meeting of the board of directors held today, resolved to issue shares through Third-Party Allotment to The Innovation Network Corporation of Japan (“INCJ”), Toyota Motor Corporation, Nissan Motor Co., Ltd., Keihin Corporation, Denso Corporation, Canon Inc., Nikon Corporation, Panasonic Corporation and Yaskawa Electric Corporation, and (hereafter the “scheduled subscribers”). In implementing the Third-Party Allotment, one of the scheduled subscribers, INCJ, is required to file for regulatory approval in relation to business mergers with competition authorities in various countries, and the payment pertaining to the Allotment of Third Party Shares is subject to approval from all the applicable regulatory authorities. Furthermore, implementation of the Third-Party Allotment will result in changes to major shareholders, the largest shareholder who is a major shareholder, the parent company and other related companies, as outlined herein. I. Outline of the Third-Party Allotment 1. Outline of the offering February 23, 2013 through September 30, 2013 (Note 1) The above schedule takes into account the time required by the competition authorities of each country where INCJ, one of the (1) Issue period scheduled subscribers, files application, to review the Third-Party Allotment. Payment for the following total of shares is to be made promptly by the scheduled subscribers after approval from all applicable antitrust authorities, etc. -
New Robot Strategy
New Robot Strategy Japan’s Robot Strategy - Vision, Strategy, Action Plan - The Headquarters for Japan’s Economic Revitalization 10/2/2015 Part I General Statement ................................................................................ 2 Chapter 1 Prologue ...................................................................................... 2 Section 1 Current situation surrounding “Japan as a robotics superpower” .................................................................................................. 2 Section 2 Drastic transformation of robots and Japan’s future .................. 4 Section 3 Goal of robot revolution ............................................................. 7 Chapter 2 Measures for realization of robot revolution ...............................11 Section 1 Robot creativity – Thorough reinforcement of robots in Japan .11 Section 2 Utilization and popularization of robots – “Daily life with robots” across Japan ........................................................................... 13 Section 3 Development and progress of robot revolution on global perspectives – Toward new advanced IT society .................... 16 Part II Action Plan: Five-year Plan ................................................................. 18 Chapter 1 Cross-Cutting Issues ................................................................. 18 Section 1 Establishment of "Robot Revolution Initiative (RRI)" ............... 18 Section 2 Technology development toward the next generation ............. 20 Section 3 Policy -

Newsletter | Your Update on What’S New from DENSO Aftermarket Sales
Newsletter | Your update on what’s new from DENSO Aftermarket Sales Issue number 42 | March 2015 Menu > Follow the links below! Inside this issue… > Auto Professioneel & Schadeherstel Tradeshow, Netherlands > Spotlight on Spark Plugs > 2014 FIA WEC Toyota Racing win > Third quarter financial results > May we introduce – Mark Robertson > Toyota TS030 Hybrid Le Mans racing car on stand, featuring a rear hybrid motor system specifically developed by DENSO. Gorinchem tradeshow a sparkling success DENSO exhibited at the Auto Professioneel answer questions on all DENSO products continue strengthening interest in the & Schadeherstel Tradeshow which took available to retailers and garages. DENSO brand in the Netherlands,” place in Gorinchem, The Netherlands explained Dominic. on February 3rd – 5th. The three day Another big draw on the stand was the event attracted around 16,000 visitors, DENSO sponsored Toyota TS030 Hybrid The next Auto Professioneel & and featured 250 exhibitors from the Le Mans racing car, featuring a rear Schadeherstel Tradeshow will take automotive industry. hybrid motor system specifically place in early 2016. developed by DENSO. DENSO took the opportunity to showcase a selection of products and parts from Stand visitors also had the opportunity its world-leading aftermarket programme to register with Automotive Diamonds, on three display areas which have been the popular, web-based customer loyalty tailor-made for exhibitions. Interest from scheme enabling garages and installers workshop and wholesaler visitors to the to maximise the benefits and reap the stand was also very high, with particular rewards of purchasing products from emphasis on A/C Compressors thanks to a DENSO and its programme partners. -
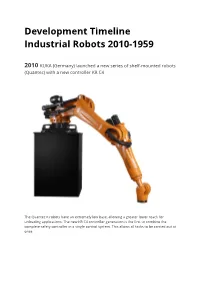
Development Timeline Industrial Robots 2010-1959
Development Timeline Industrial Robots 2010-1959 2010 KUKA (Germany) launched a new series of shelf-mounted robots (Quantec) with a new controller KR C4 The Quantec K robots have an extremely low base, allowing a greater lower reach for unloading applications. The new KR C4 controller generation is the first to combine the complete safety controller in a single control system. This allows all tasks to be carried out at once. 2009 ABB, Sweden, launched the smallest multipurpose industrial robot, IRB120 ABB's smallest ever multipurpose industrial robot weighs just 25kg and can handle a payload of 3kg (4kg for vertical wrist) with a reach of 580mm. 2009 Yaskawa Motoman, Japan, introduces control system to sync up to 8 robots Yaskawa Motoman, Japan, introduced the improved robot control system (DX100) which provided the fully synchronized control of eight robots, up to 72 axis. I/O devices and communication protocols. Dynamic interference zones protect robot arm and provide advanced collision avoidance. 2008 FANUC, Japan, launched a new heavy duty robot with a payload of almost 1,200 kg "The M-2000iA is the world's largest and strongest six-axis robot," said Rich Meyer, product manager, Fanuc Robotics . "It has the longest reach and the strongest wrist surpassing all other six-axis robots available today. The wrist strength sets a record, but more importantly, allows our customers to move large heavy parts a great distance with maximum stability." 2007 With the first systems realized in 2006, Reis Robotics became market leader for photovoltaic -
Lighter Battery Key to Success of Hybrids
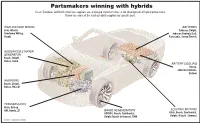
◆ JULY 10, 2006 AUTOMOTIVE NEWS EUROPE 21 ◆ Lighter battery key to success of hybrids Lithium-ion offers weight, cost benefits Partsmakers winning with hybrids over nickel metal Asian, European and North American suppliers are all playing important roles in the development of hybrid powertrains. Below are some of the leading hybrid suppliers by specific part. RICHARD TRUETT AUTOMOTIVE NEWS EUROPE HIGH-VOLTAGE WIRING BATTERIES Batteries may be the key to the Lear, Hitachi, Cobasys, Delphi, future of gasoline-electric hybrids. Sumitomo Wiring, Johnson Controls/Saft, If hybrids are ever going to earn Yazaki Panasonic, Sanyo Electric automakers a profit, the cost of the batteries must decrease and the life of the battery pack increase. The number of battery suppliers also must expand so that batteries are INTEGRATED STARTER just another commodity, like wind- GENERATOR shield wipers and headlights. Bosch, Delphi, Lithium ion – the same type of Denso, Valeo powerful, compact battery in your BATTERY COOLING mobile phone and digital camera – Denso, could be the wonder battery that Johnson Controls, delivers all that and more. Visteon Virtually all of today’s hybrids use nickel-metal hydride batteries. Nickel metal has proved to be reli- INVERTERS able, but the battery packs are Bosch, Delphi, heavy, and the materials inside are Denso, Hitachi expensive compared with those in lithium-ion packs. Expensive replacement Also, most experts think that TRANSMISSIONS hybrid cars, such as the Toyota Aisin, Getrag, Prius, will need a replacement bat- GM, Honda, ZF BRAKE REGENERATION ELECTRIC MOTORS tery pack after eight years or ADVICS, Bosch, Continental, Aisin, Bosch, Continental, 100,000 miles. -

DENSO Manufacturing Arkansas, Inc. Names New President
DENSO Manufacturing Arkansas, Inc. Names New President JUL 28 | 2015 Contact: John Beal DENSO Manufacturing Arkansas, Inc. Phone: 870-622-9513 [email protected] DENSO Corporation has named George Harguess president of its DENSO Manufacturing Arkansas, Inc. (DMAR) operations in Osceola, Ark., effective July 1. Osceola, Ark. – DENSO Corporation has named George Harguess president of its DENSO Manufacturing Arkansas, Inc. (DMAR) operations in Osceola, Ark., effective July 1. Harguess succeeds Andris Staltmanis, who was recently named president of DENSO Manufacturing Michigan, Inc. in Battle Creek, Mich. Mostly recently, Harguess served as DMAR plant director, directly responsible for manufacturing, production control and maintenance as well as oversight for daily operations at the facility. Harguess joined DMAR as the operations assistant general manager in 2008 and was promoted to plant director in 2012. Harguess joined DENSO in 1991 as a team leader at DENSO Manufacturing Tennessee (DMTN) in Maryville, Tenn. In 1995, Harguess was promoted to supervisor then assistant manager of starter production. From 2000-2003, Harguess served as starter manager, followed by five years as senior manager of DMTN’s starter and alternator plants. About DENSO: DENSO Corp., headquartered in Kariya, Aichi prefecture, Japan, is a leading global automotive supplier of advanced technology, systems and components in the areas of thermal, powertrain control, electronics and information and safety. Its customers include all the world’s major carmakers. Worldwide, the company has more than 200 subsidiaries and affiliates in 38 countries and regions (including Japan) and employs more than 140,000 people. Consolidated global sales for the fiscal year ending March 31, 2015, totaled US$35.9 billion. -

Exhibition Guide
The Robot Revolution Has BegunBegun - Toward Heartwarming Society Society Exhibition Guide Date Nov. 29(Wed) Dec. 2(Sat), 2017 Venue Tokyo Big Sight East Hall Organizers: Japan Robot Association (JARA), THE NIKKAN KOGYO SHIMBUN, LTD. A4_17iREX_annai_E.indd 2 2017/02/20 14:04:13 Greeting RT The Robot Revolution Has Begun Robot Technology - Toward Heartwarming Society Robot technology has greatly contributed to the development of manufacturing in Japan, expanding its scope of application from production sites to our daily lives while continuing the challenge to address various issues, such as the declining birthrate and aging population, decrepit infrastructure and disaster response. The International Robot Exhibition 2017 will be held under the theme, “The Robot Revolution Has Begun –Toward Heartwarming Society-” with an aspiration to have people and robots coexist and collaborate in order to create a more people-friendly society. The latest robot technology and products from Japan and abroad will be presented during the exhibition together with next-generation technology such as AI, big data, and networks to facilitate more exchanges in technology and business talks. We hope that you will take this opportunity to participate in the exhibition. Japan Robot Association (JARA) © UDAGAWA YASUHITO 1998 THE NIKKAN KOGYO SHIMBUN, LTD. Features of the International Robot Exhibition One of the World’s Largest Robot Trade Shows The International Robot Exhibition first held in 1974, has since been held once every two years and will mark its 22nd exhibition this year. In the last exhibition held in 2015, the number of exhibitors was 446 companies and organizations, and the number of booths reached 1,882 which is the largest number ever. -

A 1 a 1 a 1 E 1 E 1 E 1 27 18 29 9 1 49 50 41 18 a 3 a 4 E 4 7 E 3
DAY 1 & DAY 2 DAY 3 DAY 4 DAY 4 DAY 3 DAY 1 & DAY 2 A 1 A 1 A 1 A-1st E-1st E 1 E 1 E 1 27 Deloitte 25 Deloitte 26 Deloitte Deloitte 18 11 Fujitsu Ten Konoike 29 Konoike 9 Konoike 15 1 17 33 49 50 41 18 2 0 A 2 5 A 3 2 A 4 14 12 E 4 7 E 3 14 E 2 12 Asahi Beer Ishigami Diamond WTG E-2nd 11 9 A-2nd Nissin Int'l Transport Fujitsu Ten Team O A Konoike Asahi Beer E A 3 A 4 A 2 E 2 E 4 E 3 19 Ishigami 3 Diamond WTG 12 Asahi Beer 61 62 Team O 10 Nissin Int'l Transport 3 Fujitsu Ten 21 9 25 34 14 9 42 26 10 13 A 4 16 A 2 5 A 3 E 3 19 E 2 28 E 4 1 Diamond WTG Asahi Beer Ishigami Fujitsu Ten Team O Nissin Int'l Transport B 1 B 1 B 1 B 1 B 5 F 1 F 1 F 1 30 JTB 10 JTB 23 JTB 10 JTB 9 SoftBank B-1st F-1st Nippon Express 14 Nippon Express 29 Nippon Express 26 3 19 35 47 51 ALPINE 17 22 Nippon Express 53 28 4 15 B 2 3 B 5 14 B 4 28 B 3 15 B 4 59 11 14 60 F 4 8 F 3 2 F 2 6 Epson SoftBank MUFG Union Bank ALPINE MUFG Union Bank 67 FINAL "K" LINE Cross Marketing KPMG B F-2nd 21 Deloitte 5 2 B-2nd F B 3 B 2 B 5 B 2 B 2 "K" LINE Yamaha Motor-B 10 JTB F 2 F 4 F 3 28 ALPINE 6 Epson 4 SoftBank 17 Epson 7 Epson 65 66 KPMG 24 "K" LINE 21 Cross Marketing 9 11 27 36 48 52 54 20 12 1 B 4 26 B 4 27 B 3 16 B 5 23 B 3 68 3rd Place F 3 4 F 2 14 F 4 11 MUFG Union Bank MUFG Union Bank ALPINE SoftBank ALPINE Tokio Marine 7 Cross Marketing KPMG "K" LINE Nippon Express 13 C 1 C 1 C 1 24 Hotta Liesenberg 21 Hotta Liesenberg 26 Hotta Liesenberg C-1st G-1st G 1 G 1 G 1 5 21 37 Hotta Liesenberg 24 13 Yamaha-Motor-B Yamaha Motor - B 15 Yamaha Motor - B 24 Yamaha Motor - B 23 4 -

The Next Generation Communications Privacy Act
ARTICLE THE NEXT GENERATION COMMUNICATIONS PRIVACY ACT ORIN S. KERR† In 1986, Congress enacted the Electronic Communications Privacy Act (ECPA) to regulate government access to Internet communications and records. ECPA is widely regarded as outdated, and ECPA reform is now on the Congressional agenda. At the same time, existing reform proposals retain the structure of the 1986 Act and merely tinker with a few small aspects of the statute. This Article offers a thought experiment about what might happen if Congress were to repeal ECPA and enact a new privacy statute to replace it. The new statute would look quite different from ECPA because overlooked changes in Internet technology have dramatically altered the assumptions on which the 1986 Act was based. ECPA was designed for a network world with high storage costs and only local network access. Its design reflects the privacy threats of such a network, including high privacy protection for real-time wiretapping, little protection for noncontent records, and no attention to particularity or jurisdiction. Today’s Internet reverses all of these assumptions. Storage costs have plummeted, leading to a reality of almost total storage. Even U.S.-based services now serve a predominantly † Fred C. Stevenson Research Professor, George Washington University Law School. This Article was supported by the Daniel and Florence Guggenheim Foundation Program on Demography, Technology and Criminal Justice at the Law Library of Congress, where the Author presently serves as a Scholar in Residence. The Author thanks Richard Salgado, Chris Soghoian, Al Gidari, Jim Dempsey, Marc Zwillinger, Chris Yoo, Eric Goldman, Edward Felten, Ryan Calo, Andrea Matwyshyn, Jerry Kang, Ramesh Ponnuru, and Gail Kent for their helpful comments, as well as Cynthia Jordan, Robert Newlen, and David Mao at the Law Library of Congress for their support.