U.S. Navy Employment Options for UNMANNED SURFACE VEHICLES (Usvs)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AI, Robots, and Swarms: Issues, Questions, and Recommended Studies
AI, Robots, and Swarms Issues, Questions, and Recommended Studies Andrew Ilachinski January 2017 Approved for Public Release; Distribution Unlimited. This document contains the best opinion of CNA at the time of issue. It does not necessarily represent the opinion of the sponsor. Distribution Approved for Public Release; Distribution Unlimited. Specific authority: N00014-11-D-0323. Copies of this document can be obtained through the Defense Technical Information Center at www.dtic.mil or contact CNA Document Control and Distribution Section at 703-824-2123. Photography Credits: http://www.darpa.mil/DDM_Gallery/Small_Gremlins_Web.jpg; http://4810-presscdn-0-38.pagely.netdna-cdn.com/wp-content/uploads/2015/01/ Robotics.jpg; http://i.kinja-img.com/gawker-edia/image/upload/18kxb5jw3e01ujpg.jpg Approved by: January 2017 Dr. David A. Broyles Special Activities and Innovation Operations Evaluation Group Copyright © 2017 CNA Abstract The military is on the cusp of a major technological revolution, in which warfare is conducted by unmanned and increasingly autonomous weapon systems. However, unlike the last “sea change,” during the Cold War, when advanced technologies were developed primarily by the Department of Defense (DoD), the key technology enablers today are being developed mostly in the commercial world. This study looks at the state-of-the-art of AI, machine-learning, and robot technologies, and their potential future military implications for autonomous (and semi-autonomous) weapon systems. While no one can predict how AI will evolve or predict its impact on the development of military autonomous systems, it is possible to anticipate many of the conceptual, technical, and operational challenges that DoD will face as it increasingly turns to AI-based technologies. -

Rigid Wing Sailboats: a State of the Art Survey Manuel F
Ocean Engineering 187 (2019) 106150 Contents lists available at ScienceDirect Ocean Engineering journal homepage: www.elsevier.com/locate/oceaneng Review Rigid wing sailboats: A state of the art survey Manuel F. Silva a,b,<, Anna Friebe c, Benedita Malheiro a,b, Pedro Guedes a, Paulo Ferreira a, Matias Waller c a Rua Dr. António Bernardino de Almeida, 431, 4249-015 Porto, Portugal b INESC TEC, Campus da Faculdade de Engenharia da Universidade do Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal c Åland University of Applied Sciences, Neptunigatan 17, AX-22111 Mariehamn, Åland, Finland ARTICLEINFO ABSTRACT Keywords: The design, development and deployment of autonomous sustainable ocean platforms for exploration and Autonomous sailboat monitoring can provide researchers and decision makers with valuable data, trends and insights into the Wingsail largest ecosystem on Earth. Although these outcomes can be used to prevent, identify and minimise problems, Robotics as well as to drive multiple market sectors, the design and development of such platforms remains an open challenge. In particular, energy efficiency, control and robustness are major concerns with implications for autonomy and sustainability. Rigid wingsails allow autonomous boats to navigate with increased autonomy due to lower power consumption and increased robustness as a result of mechanically simpler control compared to traditional sails. These platforms are currently the subject of deep interest, but several important research problems remain open. In order to foster dissemination and identify future trends, this paper presents a survey of the latest developments in the field of rigid wing sailboats, describing the main academic and commercial solutions both in terms of hardware and software. -

Zerohack Zer0pwn Youranonnews Yevgeniy Anikin Yes Men
Zerohack Zer0Pwn YourAnonNews Yevgeniy Anikin Yes Men YamaTough Xtreme x-Leader xenu xen0nymous www.oem.com.mx www.nytimes.com/pages/world/asia/index.html www.informador.com.mx www.futuregov.asia www.cronica.com.mx www.asiapacificsecuritymagazine.com Worm Wolfy Withdrawal* WillyFoReal Wikileaks IRC 88.80.16.13/9999 IRC Channel WikiLeaks WiiSpellWhy whitekidney Wells Fargo weed WallRoad w0rmware Vulnerability Vladislav Khorokhorin Visa Inc. Virus Virgin Islands "Viewpointe Archive Services, LLC" Versability Verizon Venezuela Vegas Vatican City USB US Trust US Bankcorp Uruguay Uran0n unusedcrayon United Kingdom UnicormCr3w unfittoprint unelected.org UndisclosedAnon Ukraine UGNazi ua_musti_1905 U.S. Bankcorp TYLER Turkey trosec113 Trojan Horse Trojan Trivette TriCk Tribalzer0 Transnistria transaction Traitor traffic court Tradecraft Trade Secrets "Total System Services, Inc." Topiary Top Secret Tom Stracener TibitXimer Thumb Drive Thomson Reuters TheWikiBoat thepeoplescause the_infecti0n The Unknowns The UnderTaker The Syrian electronic army The Jokerhack Thailand ThaCosmo th3j35t3r testeux1 TEST Telecomix TehWongZ Teddy Bigglesworth TeaMp0isoN TeamHav0k Team Ghost Shell Team Digi7al tdl4 taxes TARP tango down Tampa Tammy Shapiro Taiwan Tabu T0x1c t0wN T.A.R.P. Syrian Electronic Army syndiv Symantec Corporation Switzerland Swingers Club SWIFT Sweden Swan SwaggSec Swagg Security "SunGard Data Systems, Inc." Stuxnet Stringer Streamroller Stole* Sterlok SteelAnne st0rm SQLi Spyware Spying Spydevilz Spy Camera Sposed Spook Spoofing Splendide -

Unmanned Vehicle Systems & Operations on Air, Sea, Land
Kansas State University Libraries New Prairie Press NPP eBooks Monographs 10-2-2020 Unmanned Vehicle Systems & Operations on Air, Sea, Land Randall K. Nichols Kansas State University Hans. C. Mumm Wayne D. Lonstein Julie J.C.H Ryan Candice M. Carter See next page for additional authors Follow this and additional works at: https://newprairiepress.org/ebooks Part of the Aerospace Engineering Commons, Aviation and Space Education Commons, Higher Education Commons, and the Other Engineering Commons This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 4.0 License. Recommended Citation Nichols, Randall K.; Mumm, Hans. C.; Lonstein, Wayne D.; Ryan, Julie J.C.H; Carter, Candice M.; Hood, John-Paul; Shay, Jeremy S.; Mai, Randall W.; and Jackson, Mark J., "Unmanned Vehicle Systems & Operations on Air, Sea, Land" (2020). NPP eBooks. 35. https://newprairiepress.org/ebooks/35 This Book is brought to you for free and open access by the Monographs at New Prairie Press. It has been accepted for inclusion in NPP eBooks by an authorized administrator of New Prairie Press. For more information, please contact [email protected]. Authors Randall K. Nichols, Hans. C. Mumm, Wayne D. Lonstein, Julie J.C.H Ryan, Candice M. Carter, John-Paul Hood, Jeremy S. Shay, Randall W. Mai, and Mark J. Jackson This book is available at New Prairie Press: https://newprairiepress.org/ebooks/35 UNMANNED VEHICLE SYSTEMS & OPERATIONS ON AIR, SEA, LAND UNMANNED VEHICLE SYSTEMS & OPERATIONS ON AIR, SEA, LAND PROFESSOR RANDALL K. NICHOLS, JULIE RYAN, HANS MUMM, WAYNE LONSTEIN, CANDICE CARTER, JEREMY SHAY, RANDALL MAI, JOHN P HOOD, AND MARK JACKSON NEW PRAIRIE PRESS MANHATTAN, KS Copyright © 2020 Randall K. -

Countersea Operations
COUNTERSEA OPERATIONS Air Force Doctrine Document 2-1.4 15 September 2005 This document complements related discussion found in Joint Publication 3-30, Command and Control for Joint Air Operations. BY ORDER OF THE AIR FORCE DOCTRINE DOCUMENT 2-1.4 SECRETARY OF THE AIR FORCE 15 SEPTEMBER 2005 SUMMARY OF REVISIONS This document is substantially revised. This revision’s overarching changes are new chapter headings and sections, terminology progression to “air and space” from “aerospace,” expanded discussion on planning and employment factors, operational considerations when conducting countersea operations, and effects-based methodology and the emphasis on operations vice capabilities or platforms. Specific changes with this revision are the additions of the naval warfighter’s perspective to enhance understanding the environment, doctrine, and operations of the maritime forces on page 3; comparison between Air Force and Navy/Marine Corp terminology, on page 7, included to ensure Air Force forces are aware of the difference in terms or semantics; a terminology matrix added to simplify that awareness on page 9; amphibious operations organization, command and control, and planning are also included throughout the document. Supersedes: AFDD 2-1.4, 4 June 1999 OPR: HQ AFDC/DS (Lt Col Richard Hughey) Certified by: AFDC/DR (Lt Col Eric Schnitzer) Pages: 66 Distribution: F Approved by: Bentley B. Rayburn, Major General, USAF Commander, Headquarters Air Force Doctrine Center FOREWORD Countersea Operations are about the use of Air Force capabilities in the maritime environment to accomplish the joint force commander’s objectives. This doctrine supports DOD Directive 5100.1 requirements for surface sea surveillance, anti-air warfare, anti-surface ship warfare, and anti-submarine warfare. -

Sensors and Measurements for Unmanned Systems: an Overview
sensors Review Sensors and Measurements for Unmanned Systems: An Overview Eulalia Balestrieri 1,* , Pasquale Daponte 1, Luca De Vito 1 and Francesco Lamonaca 2 1 Department of Engineering, University of Sannio, 82100 Benevento, Italy; [email protected] (P.D.); [email protected] (L.D.V.) 2 Department of Computer Science, Modeling, Electronics and Systems (DIMES), University of Calabria, 87036 Rende, CS, Italy; [email protected] * Correspondence: [email protected] Abstract: The advance of technology has enabled the development of unmanned systems/vehicles used in the air, on the ground or on/in the water. The application range for these systems is continuously increasing, and unmanned platforms continue to be the subject of numerous studies and research contributions. This paper deals with the role of sensors and measurements in ensuring that unmanned systems work properly, meet the requirements of the target application, provide and increase their navigation capabilities, and suitably monitor and gain information on several physical quantities in the environment around them. Unmanned system types and the critical environmental factors affecting their performance are discussed. The measurements that these kinds of vehicles can carry out are presented and discussed, while also describing the most frequently used on-board sensor technologies, as well as their advantages and limitations. The paper provides some examples of sensor specifications related to some current applications, as well as describing the recent research contributions in the field. Citation: Balestrieri, E.; Daponte, P.; Keywords: unmanned systems; UAV; UGV; USV; UUV; sensors; payload; challenges De Vito, L.; Lamonaca, F. Sensors and Measurements for Unmanned Systems: An Overview. -

Guide to the William A. Baker Collection
Guide to The William A. Baker Collection His Designs and Research Files 1925-1991 The Francis Russell Hart Nautical Collections of MIT Museum Kurt Hasselbalch and Kara Schneiderman © 1991 Massachusetts Institute of Technology T H E W I L L I A M A . B A K E R C O L L E C T I O N Papers, 1925-1991 First Donation Size: 36 document boxes Processed: October 1991 583 plans By: Kara Schneiderman 9 three-ring binders 3 photograph books 4 small boxes 3 oversized boxes 6 slide trays 1 3x5 card filing box Second Donation Size: 2 Paige boxes (99 folders) Processed: August 1992 20 scrapbooks By: Kara Schneiderman 1 box of memorabilia 1 portfolio 12 oversize photographs 2 slide trays Access The collection is unrestricted. Acquisition The materials from the first donation were given to the Hart Nautical Collections by Mrs. Ruth S. Baker. The materials from the second donation were given to the Hart Nautical Collections by the estate of Mrs. Ruth S. Baker. Copyright Requests for permission to publish material or use plans from this collection should be discussed with the Curator of the Hart Nautical Collections. Processing Processing of this collection was made possible through a grant from Mrs. Ruth S. Baker. 2 Guide to The William A. Baker Collection T A B L E O F C O N T E N T S Biographical Sketch ..............................................................................................................4 Scope and Content Note .......................................................................................................5 Series Listing -
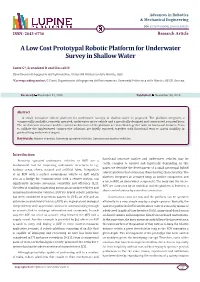
A Low Cost Prototypal Robotic Platform for Underwater Survey in Shallow Water
Advances in Robotics & Mechanical Engineering DOI: 10.32474/ARME.2020.02.000150 ISSN: 2643-6736 Research Article A Low Cost Prototypal Robotic Platform for Underwater Survey in Shallow Water Conte G*, Scaradozzi D and Ciuccoli N Dipartimento di Ingegneria dell’Informazione, Università Politecnica delle Marche, Italy *Corresponding author: G Conte, Dipartimento di Ingegneria dell’Informazione, Università Politecnica delle Marche, 60131 Ancona, Received: November 12, 2020 Published: November 30, 2020 Abstract A small, innovative robotic platform for underwater surveys in shallow water is proposed. The platform integrates a The mechatronic structure and the control architecture of the platform are described together with its functional features. Tests commercially available, remotely operated, underwater micro vehicle and a specifically designed and constructed actuated buoy. geolocalizing underwater targets. to validate the implemented constructive solutions are briefly reported, together with functional tests to assess usability in Keywords: Marine robotics; Remotely operated vehicles; Autonomous surface vehicles Introduction functional structure surface and underwater vehicles may be Remotely operated underwater vehicles or ROV are a fundamental tool for inspecting underwater structures in e.g. paper, we describe the development of a small prototypal hybrid costly, complex to operate and logistically demanding. In this robotic platform that overcomes these limiting characteristics. The of an ROV with a surface autonomous vehicle or ASV, which harbour areas, rivers, natural and artificial lakes. Integration platform integrates an actuated buoy, as surface component, and acts as a bridge for communication with a remote station, can The idea of coupling cooperating autonomous surface vehicles and a micro-ROV, as underwater component. The bouy and the micro- significantly increase autonomy, versatility and efficiency [1,2]. -
MASINT Handbook for the Warfighter (Redacted)
__________'"*SECRET/NOFORN/VVNINTEL ' OFDIA MASINT Handbook for the Warfighter (U) Prepared by The INCA Project Office t Novemlier 1994 ;=' ··'JB :<:::251 Uf.;8 : ; ~ X5061.2 ---------S.ECRETlNOFORNfvVNINTEL MASINT Handbook for the Warfighter (U) Prepared by The INCA Project Office November 1994 UNCLASSIFIED This handbook wa.<; Ero::gar,:d hv the INCi\ Pn~ject Office under the direction of lfblf )·1 l JSC 424 I l1h)(3)'10 IISC 424 I Arc.hite.c.tur.cs., <t\s.i_;;~~d by The Analytic Science.:-; Corporation. TASCStaff Authors ..................................................... Editor.......................................................... [b)[6) Illustrations/Designs .................................. Production. S.\Jppvrt.. ..... w •. -.... , .....................,..__ ____ ___, ··-------· ·---···-·.. ·-·----- ··--··-··-··. ···------· ··------·--------.. ii UNCLASSIFIED UNCLASSIFIED . :. ... ~ :.: .. Oistribution List SUBJECT~ Measurement and Signature -Intelliga~~~- {~!NT) Handbook for the Warfigbter · l . The MASINT Handbook. for the W:~rt.i9"b:t:e.r. ia · -de.li!f;!P.).ed to demystify the world of MASINT and provi~e foc.u.s.ed· i.nf.ormation on how MAS!.NT does and can support the :war.fighter ···n<:>w· and in the future. The Handbook will be ·:an effective companion doe<Jment t.o the new MASINT Users Guide, DIAM 58-8 now in production. 2. MA.9INT ia not just scientific and techniC.iil _intelligence. ~ perceive MAS.!N'r as "In.telligence for the Fu.t.u~e ';Battlefield. 11 MASINI' is the absolutely essential th~eat., performance, signature, and profile information required to support force modernization and the effective employment of our increas~ng array of smart, brilliant, high-t-ecnnology weapons. r:~ tne future, the gathering of this informa~ion will require strong intelligence and operational partnerships to include coope.ra·tive use and integration of collection resources. -

Diseño Y Simulación Del Sistema De Locomoción De Un Robot Hexápodo Para Tareas De Búsqueda Y Rescate
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES Trabajo Fin de Grado Diseño y Simulación del Sistema de Locomoción de un Robot Hexápodo para Tareas de Búsqueda y Rescate Tutor: Dr. Antonio Barrientos Cruz Alumno: Jesús Tordesillas Torres 12431 Curso 2015/2016 Página dejada intencionadamente en blanco “Again, I was watching every person coming down, looked at their face, just to make them happy that they were getting out and we were going in and everything was okay” Kirk Long, bombero en el 11-S Página dejada intencionadamente en blanco Agradecimientos Con mucho gusto puedo dar los agradecimientos a muchas personas. Lamentablemente, en la primera página sólo se puede poner un nombre, pero es justo reconocer que este proyecto no hubiese sido posible sin la ayuda de muchos personas cercanas. En primer lugar, como no, gracias a mi familia. Gracias a mi madre por la lectura atenta y revisión del trabajo. Gracias a mi padre por la ayuda en la revisión del encoder del banco de ensayos. Gracias a mis hermanos Pablo y Alberto por acompañarme en las pruebas en el campo. Y no sólo gracias por eso: gracias, simplemente, por estar ahí. También le debo dar las gracias a mi tutor Antonio Barrientos y al tutor externo Jorge. Gracias por estar siempre apoyándome incluso en las situaciones en las que parecía que todo estaba perdido. A Antonio también le debo dar especialmente las gracias por sus clases de Dinámica de Sistemas y de Robótica: gracias por tu motivación en las clases y gracias por la cercanía a los alumnos. -

JP 4-01.2 JTTP for Sealift Support to Joint Operations
Joint Pub 4-01.2 Joint Tactics, Techniques, and Procedures for Sealift Support to Joint Operations 9 October 1996 PREFACE 1. Scope military guidance for use by the Armed Forces in preparing their appropriate plans. It is not This publication provides a comprehensive the intent of this publication to restrict the overview of several key areas of sealift that authority of the joint force commander (JFC) are considered essential for the successful from organizing the force and executing the employment of sealift in support of national mission in a manner the JFC deems most military strategy. These areas are the appropriate to ensure unity of effort in the contribution of sealift to the execution of accomplishment of the overall mission. national military strategy; the sealift mission and its functions in the area of strategic 3. Application mobility; sealift forces, current sealift assets and programs; the joint and Service a. Doctrine and selected tactics, techniques, organizations for sealift; Service relationships and procedures and guidance established in with the United States Transportation this publication apply to the commanders Command regarding sealift forces; the of combatant commands, subunified command and control system for employment commands, joint task forces, and subordinate of sealift forces; sealift support of the components of these commands. These geographic combatant commander and, principles and guidance also may apply when responsibility for planning, programming, and significant forces of one Service are attached budgeting for sealift forces to meet national to forces of another Service or when military objectives. significant forces of one Service support forces of another Service. 2. Purpose b. -

Prevention of Biothreats: a Look Ahead
Center for Biosecurity of UPMC Prevention of Biothreats: A Look Ahead SUMMARY REPORT OF SPEAKER PRESENTATIONS AND PANEL DISCUSSIONS Prepared by the staff of the Center for Biosecurity of UPMC On October 6, 2009, the Center for Biosecurity of UPMC convened a one-day conference, Prevention of Biothreats: A Look Ahead, in Washington, DC. The conference was hosted in collaboration with the Commission on the Prevention of Weapons of Mass Destruction Proliferation and Terrorism, and it was funded by the Alfred P. Sloan Foundation. This meeting convened nearly 200 government officials, congressional staff members, policy analysts, scientists, health leaders, and members of the media to discuss strategies for countering biological weapons threats. During the conference, participants discussed a wide range of U.S. government programs, international approaches, and non-governmental efforts aimed at preventing the development and use of biological weapons, including: arms control and multilateral agreements; efforts to prevent the unlawful acquisition of materials, equipment, and information; deterrence, intelligence, and surveillance; and improving resiliency to biological attacks as a means of dissuasion and prevention. Given the wide range of activities and professional groups engaged in biothreat prevention efforts, it is rare for the entire community to convene as a single group. This meeting accomplished that—the first step toward generating promising new ideas and directions for biothreat prevention and promoting greater coherence in the biopreparation community. This summary report was prepared by the staff of the Center for Biosecurity of UPMC to provide a synopsis of each day’s panel discussions and individual presentations. We invite you to visit the conference website, where you will find videos of the day’s discussions along with the conference agenda, speaker bios, the attendee list, and background readings: www.upmc-biosecurity.org/preventionconf.