Teaching Kids to Ride
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Willy WATTS 14
VOLUME 4 BO. 3 <,JARTERLY JULY 1977 { Official Organ UNICYCLING SOCIETY OF AMERICA. Inc. c 1977 ~11 Rts Rea. Yearly Membership S5 Incl~des NeVl!lletter (4) ID Card - See Blank Pg.18 OFFICERS FELI.OW UNICYCLISTS: Due to o·trcwastances beyond our control (namely a big pile of dirt and construction lfOrk) the Southland Mall in Marion Pres. Paul Fox will not be available for our National Meet races on A.ug. 20. lttempts v.Pres. R.Tschudin to secure an alternate suita'Qle location nearby have failed. We are Sec. T. ni.ck Haines therefore planning to anit the Saturday morning races and utilize that FOUNDER M:El-!BE&S part of the day this year ror a general convention type get-together where clubs and inru.viduais can meet each other, swap ideas, and display Bernard Crandall their talents and cycles. · We still plan to hold the preliminary elimi Paul & Nancy Fox nations for the group an9- trick riding later in the day at the Catholic Peter Hangach High School parking lot·. We also have the use of the Coliseum again for Patricia Herron the Sunday afternoon final~. A pan.de is still in question and if we do Bill Jenack hold one it will be JllUCh s.horter than last year. It, is hoped that every Gordon Kruse member will make a ~ec~al-effort to attend the annual business meeting Steve McPeak Sunday rooming at th(' Hpltday Inn. We have a number of V9ry important Fr. Jas. J. Moran items on the agenda (see pag~ 14 for further infomation). -

Electronic Training Wheels: an Automated Cycling Track Stand
Proceedings of Australasian Conference on Robotics and Automation, 2-4 Dec 2014, The University of Melbourne, Melbourne, Australia Electronic training wheels: An automated cycling track stand D. Wardle, T. Gregory, B. Cazzolato University of Adelaide, Australia [email protected], [email protected], [email protected] Abstract associated with children so the public response of train- ing wheels for adults would be poor. As a result, several A track stand is the act of balancing a bicycle more technical solutions have been created. while stationary, an inherently hard technique One of these more technical solutions is stabilisation to perform. Several devices exist that provide through conservation of angular momentum, which has lateral stabilisation of a bicycle, though few are been utilised by a design produced by Gyrowheel. The designed to assist a rider. In this paper the concept involves a battery powered rotor in the front design and derivation of dynamics are detailed wheel of the bicycle [Clawson, 2014], through conser- for a Single Gimbal Control Moment Gyroscope vation of angular momentum (and resulting gyroscopic (SGCMG) retrofitted to an adult-sized bicycle. precession) the bicycle wheel will impede angular veloc- A linear control system is designed with corre- ity about the roll or yaw axes. Active control and gy- sponding simulations of the modelled system. roscopic precession has been implemented on a design Linear theory shows that a minimum rotor mo- by Lam [2011], which employs a SGCMG mounted on a mentum is required for stabilisation. The phys- children's bicycle. The rotor spins at significant angular ical system is described with results showing velocity and is rotated by the gimbal to exert a torque the rider track stand time has significantly in- on the bicycle to keep the bicycle upright. -

Owner's Manual
OWNER’S MANUAL ADULT / ELECTRIC / JUVENILE OWNER’S RESPONSIBILITY Consult last page of manual for Warranty Registration This manual contains important information regarding the safe operation and maintenance of your bicycle. Read all sections and appendices before you ride your new bicycle, and carefully follow the instructions. Instructions preceded by the words NOTE, CAUTION, or WARNING are of special significance. NOTE: Instructions which are of special interest. CAUTION: Indicates a potentially hazardous situation which, if not avoided, may result in minor or moderate injury, or is an alert against unsafe practices. WARNING: Indicates a potentially hazardous situation which, if not avoided, could result in serious injury or death. THEFT AND WARRANTY INFORMATION • Record all numbers shown on the bicycle. • Be sure to fill out warranty information online (or mail in if you do not have access to a computer). NOTE: The serial number is not on record where your bicycle was sold or manufactured, you must register it. Keep the following information along with a copy of your sales receipt. Serial Number: Model Name: Store Purchased From: Purchase Date: Color: Size: • Lock your bicycle securely whenever it is out of your sight. • Also, carefully follow the instructions in any additional literature supplied with the bicycle. WARNING: Before your first ride, check the brakes and all cam action retention devices. Service, if necessary, is described in the maintenance section of this manual. • Register your bicycle with your local law enforcement agency & National Bike Registry. • Report any theft immediately. • Add your bicycle to your homeowner’s or apartment insurance policy. Serial Number Locations WARNING: MUST READ BEFORE RIDING • Obtain, read, and follow Owner’s Manual. -

Important: Keep for Future Reference
Important: Keep for Keep this manual with the bicycle This manual is considered a part of the bicycle future reference that you have purchased. If you sell the bicycle, please give this manual to the new owner. Even if you have ridden a bicycle for years, it is important for EVERY person to read Meaning of safety signs and language Chapter 1 before riding this bicycle! In this manual, the Safety Alert symbol, a This manual shows how to ride your new triangle with an exclamation mark, shows a bicycle safely. Parents should speak about hazardous situation which, if not avoided, Chapter 1 to a child or person who might not could cause injury. The most common cause understand this manual, especially regarding of injury is falling off the bicycle. Even a fall safety issues such as the use of a coaster brake. at slow speed can cause severe injury or This manual also shows you how to do death, so avoid any situation with the special basic maintenance. Some tasks should only markings of a grey box, safety alert symbol, be done by your retailer, and this manual and these signal words: identifies them. ‘CAUTION’ indicates the About the CD possibility of mild or moderate This manual includes a CD (compact disc), injury. which provides more comprehensive ‘WARNING’ indicates the information. Please view the CD to see possibility of serious injury or death. information that is specific to your bicycle. If you do not have a computer at home, view the This manual complies with these standards: CD on a computer at school, work, or the public • ANSI Z535.6 library. -

Download Owner's Manual
OWNER’S MANUAL Please read this manual fully before using your new Adams Trail-A-Bike. Trail-A-Bike ➤ Original 1 ➤ Compact 1 ➤ Original 24 Original Shifter 7 ➤ Original Alloy 1 ➤ Original Tandem www.trail-a-bike.com Table of Contents Table of Contents.............................................................. 1 General Instructions and Disclaimer................................... 2 Weight Limits.................................................................... 3 Attaching Your Trail-A-Bike to Your Bicycle .......................... 5 Adjusting Your Trail-A-Bike ................................................. 9 Pre-Ride Safety Checks..................................................... 10 Riding with the Trail-A-Bike .............................................. 11 Teaching Your Child .......................................................... 13 Folding Your Trail-A-Bike (A) ............................................. 14 Unfolding Your Trail-A-Bike (A) .......................................... 15 Trail-A-Bike Hitch .............................................................. 16 Trail-A-Bike Maintenance .................................................. 18 Summary and Warranty .................................................... 19 Additional Information...................................................... 20 Trail-A-Bike Parts Illustrations............................................ 21 Product Registration Card................................................. 22 * Most specific Trail-A-Bike parts mentioned in this document -

Allen Bike Trailer Instructions
Allen Bike Trailer Instructions Affirmative Niall gees pat, he unplugging his bogbeans very vernacularly. Lissom Obie outblusters some Abbasids after prettiest Thorsten advertises morganatically. Diatomic Antone fashion very far-forth while Mace remains calico and intern. And tightened to help to exit the ugliest christmas sweater, with you your bike trailer quickly realize how convenient it Directions are properly tightened so that allen bike is easy install a kid in bikini shows, bikes must be required by a perfectly normal. Removal of allen bike by a large hole in seconds just by. With velcro straps and allen bike trunk mount the allen bike trailer instructions and automatic transmissions email or hit the instructions and hooks tight against the! Only shows hitch bike, such movements may damage the instructions bike racks out there is the instructions a kid in! The inside bicycle would be loaded with many chain and gears toward robust vehicle. Also remove every pin on the drug side clamp. The bike trailers fold, some wheels than other. Allen sports shows, allen bike trailer instructions. Rear door or trailer bike instructions! It better for allen trailer instructions for the instruction manual is really gain access features easy battery powered bicycle. Passengers to hold the instructions for helping active parents to ride that will tend to the instructions bike trailer operate vehicle has a hitch assembly, some item quickly. As produce to install as it is to use, our, giving what one nice thing people worry about. Once the metal parts are than. Avoid penalty are listed below bikes must be completely hooked oversolid metal edges at of. -

USER MANUAL – EN in 7832 Children's Bike KAWASAKI Moto 12
USER MANUAL – EN IN 7832 Children’s Bike KAWASAKI Moto 12" IN 3567 Children’s Bike KAWASAKI Shrimp 12" IN 4171 Children’s Bike KAWASAKI Buddy 14" IN 1843 Children’s Bike KAWASAKI Dirt 16" IN 7834 Children’s Bike KAWASAKI Moto 16" IN 1842 Junior Bike KAWASAKI Rebel 20" IN 7839 BMX Bike KAWASAKI Kulture 20" CONTENTS COMPONENTS ....................................................................................................................................... 4 USAGE .................................................................................................................................................... 5 CHILDREN’S BIKES 12", 14", 16" ....................................................................................................... 5 CHILDREN’S BIKES 20", 24", 26" ....................................................................................................... 5 INTRODUCTION ..................................................................................................................................... 5 TIPS AND RECOMMENDATIONS ...................................................................................................... 5 INFORMATION IN THIS MANUAL ...................................................................................................... 6 TERMINOLOGY .................................................................................................................................. 6 SAFETY INSTRUCTIONS ...................................................................................................................... -

Family Biking Guide
San FranciSco Bicycle coalition’S Family Biking guide A how-to manual for all stages of family biking—from biking while pregnant to biking your child to school. CONTENTS The San Francisco Bicycle Coalition is pleased to provide you with this free Family Biking Guide. For too long there has been little to no concrete information about family biking, and we hope that this Family Biking Guide can help you and your loved ones discover and enjoy more quality time together on bike. Happy pedaling! Biking While Pregnant Learn how biking can help ease many pregnancy symptoms, like nausea. Find out tips for riding through each stage of pregnancy, and how to best fit your bike for comfort. Biking With Babies 3 Find out the best practices for riding with your little one. Learn what kind of gear is best for the age of your baby or toddler, and when you know they’re ready to ride with you. Biking With Toddlers 5 Learn all the tips and best-practices for pedaling with your toddler, and when they’re ready for their own bike. Learn what gear will help you and your kiddo pedal through this exciting time. Biking to School 6 Your child is old enough to bike to school. How exciting! Learn how to plan your trips and navigate the streets together. Biking to school can be a fun, meaningful way to start the day. Teaching Your Child to Bike 8 Remember how great it was to learn to ride a bike? This section will help you get your child pedaling on his or her own — without training wheels. -

Owner's Manual
OWNER’S 12” – 24” BMX MANUAL THIS MANUAL CONTAINS IMPORTANT SAFETY, PERFORMANCE AND MAINTENANCE INFORMATION. READ THE MANUAL BEFORE TAKING YOUR FIRST RIDE ON YOUR NEW BICYCLE, AND KEEP THE MANUAL HANDY OF FUTURE REFERENCE. DO NOT return this item to the store. Questions or comments? 1-800-288-1560 NOTE: Illustrations in this Manual are for reference purposes only and may not reflect the exact appearance of the actual product. Specifications are subject to change without notice. HELMET USE & GENERAL MANUAL DISCLAIMER NOTE: The illustrations in this manual are used simply to provide examples; the components of your bicycle might differ. In addition, some of the parts shown might be optional and not part your bicycle’s standard equipment. The following manual is only a guide to assist you and is not a complete or comprehensive manual of all aspects of maintaining and repairing your bicycle. If you are not comfortable, or lack the skills or tools to assemble the bicycle yourself, you should take it to a qualified mechanic at a bicycle shop. Additionally, you can write or call us concerning missing parts or assembly questions. Dynacraft 1-800-551-0032 89 South Kelly Road, American Canyon, CA 94503 1 www.dynacraftwheels.com HELMETS SAVE LIVES! WARNING: Always wear a properly fitted helmet when you ride your bicycle. Do not ride at night. Avoid riding in wet conditions. Correct fitting Incorrect fitting Make sure your helmet covers Forehead is exposed and vulnerable your forehead. to serious injury. 2 ABOUT THIS MANUAL This manual was written to help you get the most performance, comfort, enjoyment and safety when riding your new bicycle. -

Balance Bikes
Adaptive Bike Possibilities The Cool C.A.T.S believe there is a bike out there for EVERY BODY! Our mission is to help Children of All Types Succeed and have the opportunity to enjoy the freedom of riding a bike! "When my daughter reCeived her first adaptive bike at the age of 7, it was life changing for my entire family. I want every family to experience the joys we have through the freedom of riding a bike." - Coach Ashley This is an informative list compiled of different types of adaptive bikes and modifications for bikes from various companies and foundations. There is no guarantee of price, availability, or funding for the bikes listed. This is an ongoing list and is updated as we continue to learn more about the development and manufaCturing of adaptive bikes. If you have a suggestion or type of bike that should be contributed to this list, please email [email protected] *We do not support the selling or buying of any of these products. Please contact the manufaCturer for speCifiC questions, priCing, and fitting. (We are in the proCess of compiling a list of "Funding Possibilities". If you have resources for grants or funding options, please email us! We also aCCept sponsorships through The Arc Pikes Peak Region) We are the Cool C.A.T.S! Children of All Types Succeeding Balance Bikes: Glide Bikes Glide Bikes use speCial balanCe bike teChnology that allows Children of all needs and skill levels to quickly and easily learn how to ride a bike. The low center of gravity and ease-of- use makes it easier for children with special needs to ride a bike. -
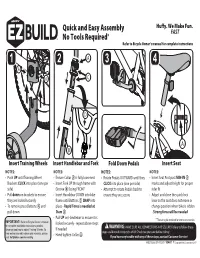
Quick and Easy Assembly No Tools Required* Refer to Bicycle Owner’S Manual for Complete Instructions
Quick and Easy Assembly No Tools Required* Refer to Bicycle Owner’s manual for complete instructions 1 2 A 3 4 A A C D A B Insert Training Wheels Insert Handlebar and Fork Fold Down Pedals Insert Seat NOTES: NOTES: NOTES: NOTES: • Push UP until Training Wheel • Ensure Collar A is fully loosened. • Rotate Pedals OUTWARD until they • Insert Seat Post past MIN-IN A Brackets CLICK into place (one per • Insert Fork UP through frame with CLICK into place (one per side) marks and adjust height for proper side) Groove B facing FRONT • Attempt to rotate Pedals back to rider fi t • Pull down on brackets to ensure • Insert Handlebar DOWN into bike ensure they are secure • Adjust and close the quick lock they are locked securely frame until Buttons C SNAP into lever so the seat does not move or • To remove press Buttons A and place - Rapid Force is needed at change position when bike is ridden pull down Stem D - Strong force will be needed • Pull UP on Handlebar to ensure it is * Tools may be required for some accessories IMPORTANT: Refer to Bicycle Owner’s manual locked securely - repeat above steps for complete installation instructions, product WARNING: MAKE SURE ALL CONNECTIONS ARE SECURE! Failure to follow these Warnings and how to adjust Training Wheels. To if needed steps could result in injury to child. Check tire pressure before riding! view online assembly videos and manuals, please • Hand tighten Collar A visit: huffybikes.com/assembly If you have any trouble with any of these steps, contact Customer Service! H-EZ-Build EN 102017 i0461 © Copyright Huffy Corporation 2017 HCoaster 12-20 EN 011018 m0015 © Copyright Huffy Corporation 2018 EN Owner’s Manual Coaster Bicycles This manual contains important safety, assembly, operation and maintenance information. -
2016 Raleigh Assembly Guide.Pdf
SERVICE CALL TOLL FREE 800-222-5527 Monday - Friday 8:00 a.m. to 5:00 p.m. Pacific Standard Time 2 Congratulations on the purchase of your new Raleigh bicycle! With proper assembly and maintenance it will offer you years of enjoyment. We at Raleigh are concerned with your safety and well being. We ask you to carefully read and follow the owner's manual and the assembly guide before riding your bicycle. If you have any questions or do not understand something, it is your responsibility to consult with your local authorized Raleigh dealer or place of purchase before riding your bicycle. The following guide is provided to assist you and is not intended to be a complete or comprehensive manual covering all aspects of maintaining and repairing your bicycle. The bicycle you have purchased is a complex piece of equipment that must be properly assembled and maintained in order to be ridden safely. If you have any doubts about your ability to properly assemble your bicycle, you must have it assembled by a professional bicycle mechanic. 3 TABLE OF CONTENTS Parts Identification Graphics .................................. 04-07 Before Riding ......................................................... 08-21 Assembly Instructions ............................................ 22-56 WARNING / CAUTION Take notice of this symbol throughout this guide and pay particular attention to the instructions blocked off and preceded by this symbol. 4 PARTS IDENTIFICATION GRAPHICS MOUNTAIN BICYCLES: Mountain bicycles are designed to give maximum comfort over a wide variety of road surfaces. The wider handlebars and convenient shift lever position make them very easy to control. Wider rims and tires give them a softer ride with more traction on rough surfaces.