Preparation of Papers for AIAA Technical Conferences
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
IATA CLEARING HOUSE PAGE 1 of 21 2021-09-08 14:22 EST Member List Report
IATA CLEARING HOUSE PAGE 1 OF 21 2021-09-08 14:22 EST Member List Report AGREEMENT : Standard PERIOD: P01 September 2021 MEMBER CODE MEMBER NAME ZONE STATUS CATEGORY XB-B72 "INTERAVIA" LIMITED LIABILITY COMPANY B Live Associate Member FV-195 "ROSSIYA AIRLINES" JSC D Live IATA Airline 2I-681 21 AIR LLC C Live ACH XD-A39 617436 BC LTD DBA FREIGHTLINK EXPRESS C Live ACH 4O-837 ABC AEROLINEAS S.A. DE C.V. B Suspended Non-IATA Airline M3-549 ABSA - AEROLINHAS BRASILEIRAS S.A. C Live ACH XB-B11 ACCELYA AMERICA B Live Associate Member XB-B81 ACCELYA FRANCE S.A.S D Live Associate Member XB-B05 ACCELYA MIDDLE EAST FZE B Live Associate Member XB-B40 ACCELYA SOLUTIONS AMERICAS INC B Live Associate Member XB-B52 ACCELYA SOLUTIONS INDIA LTD. D Live Associate Member XB-B28 ACCELYA SOLUTIONS UK LIMITED A Live Associate Member XB-B70 ACCELYA UK LIMITED A Live Associate Member XB-B86 ACCELYA WORLD, S.L.U D Live Associate Member 9B-450 ACCESRAIL AND PARTNER RAILWAYS D Live Associate Member XB-280 ACCOUNTING CENTRE OF CHINA AVIATION B Live Associate Member XB-M30 ACNA D Live Associate Member XB-B31 ADB SAFEGATE AIRPORT SYSTEMS UK LTD. A Live Associate Member JP-165 ADRIA AIRWAYS D.O.O. D Suspended Non-IATA Airline A3-390 AEGEAN AIRLINES S.A. D Live IATA Airline KH-687 AEKO KULA LLC C Live ACH EI-053 AER LINGUS LIMITED B Live IATA Airline XB-B74 AERCAP HOLDINGS NV B Live Associate Member 7T-144 AERO EXPRESS DEL ECUADOR - TRANS AM B Live Non-IATA Airline XB-B13 AERO INDUSTRIAL SALES COMPANY B Live Associate Member P5-845 AERO REPUBLICA S.A. -

1 an Assessment of Factors Affecting Airline Coalitions
1 AN ASSESSMENT OF FACTORS AFFECTING AIRLINE COALITIONS USING DECISION AND COOPERATIVE GAME THEORY Oliver F. Shya, Yi-Ping Kuob aTamkang University, 151 Ying-Chuan Road, Tamsui, Taipei County 251, Taiwan bTransAsia Airways, Floor 9, 139 Cheng-Chow Road, Taipei City 100, Taiwan [email protected], [email protected] Abstract Because of the rigorous competition in the air travel market, more airlines tend to form alliances to extend market shares and to enhance their competitiveness. Cooperation among airlines includes code sharing, equity sharing, merging and acquisition, but we only focus on code sharing and merging in this study. We first formulate payoff functions under various airline coalition scenarios. Then, we assess the effectiveness of code sharing and merging by the estimation of Shapley values. By applying TOPSIS, we create several priority rankings of target airlines in the games of code sharing and merging. A case study based on Taiwan’s domestic airlines was used for demonstration. Keywords: Code sharing; Airline merging; Cooperative games; Multi-criteria decision methods Topic area: A3 Airports and Aviation 1. Introduction 1.1 Motivation of airline coalitions, merging and acquisitions Taiwan’s deregulation of air travel market began in 1987. Since then, the number of domestic airlines increased from four to nine, and the flights between Taipei and other major cities were so frequent that made Taipei domestic airport became one of the most busiest airports in Asia. Unfortunately, the benefits of low airfare and high flight frequency resulted from deregulation did not last long. In 1998, several local air traffic accidents along with the Asian financial crisis caused most of the domestic airlines suffering from severe losses in revenue and patronages. -

Airline Choice by Passengers from Taiwan and China: a Case Study of Outgoing Passengers from Kaohsiung International Airport
Journal of Air Transport Management 49 (2015) 53e63 Contents lists available at ScienceDirect Journal of Air Transport Management journal homepage: www.elsevier.com/locate/jairtraman Airline choice by passengers from Taiwan and China: A case study of outgoing passengers from Kaohsiung International Airport * Hsi-Tien Chen a, , Ching-Cheng Chao b a Department of Leisure Industry Management, National Chin-Yi University of Technology, No. 57, Sec. 2, Zhongshan Rd., Taiping Dist., Taichung 41170, Taiwan, ROC b Department of Shipping and Transportation Management, National Kaohsiung Marine University, 142 Hai-Jhuan Road, Nan-Tzu, Kaohsiung 811, Taiwan, ROC article info abstract Article history: Understanding what factors passengers consider when selecting an airline is critical, as airlines can Received 20 June 2015 utilize this information in market segmentation and marketing strategies. However, few studies have Received in revised form explored how passenger demographics and the nationality/type of carrier (full service or low-cost; 29 July 2015 regional or international) affect the choice factors of passengers when selecting airlines. The main Accepted 9 August 2015 objective of this study was to explore the airline choice factors considered by passengers, compare the choices of passengers with different demographics, and analyze which factors are emphasized by pas- sengers from Taiwan and China when selecting airlines. We conducted a questionnaire survey of out- going passengers at Kaohsiung International Airport in relation to 22 factors underlying their choice of airline. Using factor analysis, we identified the five factors: ground services, convenience, in-flight ser- vices, price, and travel availability. We then utilized cluster analysis to identify four groups, each con- cerned with price, comfort, convenience, and ground services, respectively. -

Enhancing Airport Service Quality: a Case Study of Kaohsiung International Airport
Journal of the Eastern Asia Society for Transportation Studies, Vol.10, 2013 Enhancing Airport Service Quality: A Case Study of Kaohsiung International Airport Ching-Cheng Chaoa, Hung-Chun Linb, Chien-Yu Chenc a,b,c Department of Shipping and Transportation Management, National Kaohsiung Marine University, 142 Hai-Jhuan Road, Nan-Tzu, Kaohsiung 811, Taiwan,ROC a E-mail: [email protected] b E-mail: [email protected] c E-mail: [email protected] Abstract: Passenger traffic at Kaohsiung International Airport in Taiwan has seen a steady decline in the past few years due to several effects, including the establishment of the Taiwan High Speed Rail, and industry moving abroad. Because economic conditions have improved to some degree, and the Taiwanese government has permitted Chinese tourists to visit Taiwan and has allowed cross-strait direct flights, passengers are increasing. Therefore, the airport's priority should be promoting its service quality and environment. This study analyzed the importance and satisfaction of domestic and international tourists using questionnaires, and further applied an importance-performance analysis (IPA) to assess priority services that need improvement and to provide appropriate advice. The results showed that the priority services that must be improved comprise ground transportation, complaint handling, health center, speed of baggage claim, and comfort of the terminal. Keywords: International Airport, Service Quality, Satisfaction, Importance-Performance Analysis 1. INTRODUCTION Passenger satisfaction is a key performance indicator for airport operations. International airports located in different regions or countries by and large do not compete with one another. Passengers often do not have a choice between airports, regardless of price and quality levels of airport services. -

Avianca Holdings S.A. (Translation of Registrant’S Name Into English)
UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, DC 20549 FORM 6-K REPORT OF FOREIGN PRIVATE ISSUER PURSUANT TO RULE 13a-16 OR 15d-16 OF THE SECURITIES EXCHANGE ACT OF 1934 For the month of February, 2019. Commission File Number 001-36142 Avianca Holdings S.A. (Translation of registrant’s name into English) Aquilino de la Guardia Calle No. 8, Panama City, Republic of Panama (+507) 205-600 (Address of principal executive offices) Indicate by check mark whether the registrant files or will file annual reports under cover of Form 20-F or Form 40-F. Form 20-F ☒ Form 40-F ☐ Indicate by check mark if the registrant is submitting the Form 6-K in paper as permitted by Regulation S-T Rule 101(b)(1): ☐ Indicate by check mark if the registrant is submitting the Form 6-K in paper as permitted by Regulation S-T Rule 101(b)(7): ☐ Bogotá D.C., February 22, 2019 MATERIAL INFORMATION Avianca Holdings S.A. informs that it has published on its website www.aviancaholdings.com its earnings release for the fourth quarter of 2018 and its consolidated financial statements as of December 31, 2018 and 2017 and for each of the years ended December 31, 2018 and 2017. Enclosures: Exhibit 99.1 – Consolidated financial statements as of December 31, 2018 and 2017 and for each of the years ended December 31, 2018 and 2017. For further information please contact: Avianca Investor Relations + 571-5877700 ext. 2474, 1349 [email protected] ABOUT AVIANCA HOLDINGS S.A. The terms “Avianca Holdings” or “the Company” refer to the consolidated entity. -

AIRPORT DIRECTORY E-Gate Service 2015.6 ENGLISH VERSION No Lines VIP Immigration Service
Faster Clearance TAIWAN TAOYUAN Apply for Automated AIRPORT DIRECTORY E-Gate Service 2015.6 ENGLISH VERSION No Lines VIP Immigration Service One Scan to Read Info National Immigration Agency, Ministry of the Interior Service Information: +886-3-3985010, ext. 7401~7405 http://www.immigration.gov.tw TTIA TAIWAN TAOYUAN INTERNATIONAL AIRPORT AIRPORT INTERNATIONAL TAOYUAN TAIWAN Arrivals Information 02 Departures Information 06 Airline Counters 10 Transportation 12 Traveler Services 16 Terminal 1 Information Map 20 Terminal 2 Information Map 24 AIRPORT DIRECTORY AIRPORT Main Service Counters Taoyuan International Airport Terminal 1: Departures Service Counter: +886-3-2735081 Terminal 2: Departures Service Counter: +886-3-2735086 Tourism Bureau Service Counter Terminal 1: Arrivals Hall Service Counter: +886-3-3982194 Terminal 2: Arrivals Hall Service Counter: +886-3-3983341 TAIWAN TAOYUAN INTERNATIONAL AIRPORT 02 Arrivals Information AIRPORT DIRECTORY 03 T1 T2 Quarantine Immigration Baggage Claim ◎ E-Gate Enrollment Counters Place Time Location Animal & Plant Quarantine Customs Inspection Terminal 1, Taoyuan 07:00-22:00 ‧ At the NIA counter beside Airport Counter 12 of the Departure Mandatory Documents Hall ◎ Taiwanese Travelers: Passport, Disembarkation Card (not required for 10:00-23:00 ‧ ID inspection area of Arrival Hall those with household registration in Taiwan) Terminal 2, Taoyuan 07:00-22:00 ‧ At the NIA counter in front of ◎ Foreign Travelers: Passport, Visa, Onward Journey Ticket, Airport Counter 15 of the Departure Disembarkation Card Hall 10:00-23:00 ‧ ID inspection area of Arrival Quarantine Hall Songshan Airport 08:00-18:00 ‧ 1F, Departure Hall, Terminal Travelers proceeding to the fever screening station must remove their hat Airport 1 to facilitate infrared body temperature detection. -

Airlines Codes
Airlines codes Sorted by Airlines Sorted by Code Airline Code Airline Code Aces VX Deutsche Bahn AG 2A Action Airlines XQ Aerocondor Trans Aereos 2B Acvilla Air WZ Denim Air 2D ADA Air ZY Ireland Airways 2E Adria Airways JP Frontier Flying Service 2F Aea International Pte 7X Debonair Airways 2G AER Lingus Limited EI European Airlines 2H Aero Asia International E4 Air Burkina 2J Aero California JR Kitty Hawk Airlines Inc 2K Aero Continente N6 Karlog Air 2L Aero Costa Rica Acori ML Moldavian Airlines 2M Aero Lineas Sosa P4 Haiti Aviation 2N Aero Lloyd Flugreisen YP Air Philippines Corp 2P Aero Service 5R Millenium Air Corp 2Q Aero Services Executive W4 Island Express 2S Aero Zambia Z9 Canada Three Thousand 2T Aerocaribe QA Western Pacific Air 2U Aerocondor Trans Aereos 2B Amtrak 2V Aeroejecutivo SA de CV SX Pacific Midland Airlines 2W Aeroflot Russian SU Helenair Corporation Ltd 2Y Aeroleasing SA FP Changan Airlines 2Z Aeroline Gmbh 7E Mafira Air 3A Aerolineas Argentinas AR Avior 3B Aerolineas Dominicanas YU Corporate Express Airline 3C Aerolineas Internacional N2 Palair Macedonian Air 3D Aerolineas Paraguayas A8 Northwestern Air Lease 3E Aerolineas Santo Domingo EX Air Inuit Ltd 3H Aeromar Airlines VW Air Alliance 3J Aeromexico AM Tatonduk Flying Service 3K Aeromexpress QO Gulfstream International 3M Aeronautica de Cancun RE Air Urga 3N Aeroperlas WL Georgian Airlines 3P Aeroperu PL China Yunnan Airlines 3Q Aeropostal Alas VH Avia Air Nv 3R Aerorepublica P5 Shuswap Air 3S Aerosanta Airlines UJ Turan Air Airline Company 3T Aeroservicios -

Caa to Discipline Two Transasia Pilots for Negligence
50SKYSHADESImage not found or type unknown- aviation news CAA TO DISCIPLINE TWO TRANSASIA PILOTS FOR NEGLIGENCE News / Airlines Image not found or type unknown The pilot and co-pilot of a TransAsia Airways plane will be severely disciplined for failing to follow the instructions of air controllers and entering a runway without permission, the Civil Aeronautics Administration (CAA) said Tuesday. © 2015-2021 50SKYSHADES.COM — Reproduction, copying, or redistribution for commercial purposes is prohibited. 1 The CAA said it will discipline the pilot and co-pilot of the plane for their negligence in early October. According to the Civil Aviation Act, they could be suspended for between one and three months and fined between NT$60,000 (US$1,846) and NT$300,000. The incident took place on Sep. 4, when their TransAsia flight GE2322 was preparing to leave for Taipei from the outlying island of Kinmen at around 10:19 a.m. With a UNI Air flight five nautical miles away and ready to land at Kinmen airport, air controllers asked the TransAsia ATR72-500 plane to wait on the airport's taxiway. The co-pilot of the TransAsia Airways flight correctly repeated the request, according to the cockpit voice recorder, but then noted "06 runway" in his notebook. After another TransAsia Airways flight landed in Kinmen, the pilot asked the co-pilot, "Should we wait on the taxiway?" The co-pilot answered, "No. We can enter the runway." The pilot then asked the co-pilot if he was sure and received an affirmative response. The plane then taxied onto the runway. -

Media Release
Media Release Changi Airport to welcome TransAsia Airways SINGAPORE, 29 June 2011 – Changi Airport will welcome the arrival of Taiwanese carrier TransAsia Airways to Singapore tomorrow, with the airline’s commencement of a daily Taipei-Singapore service. Including TransAsia Airways, six carriers will operate a total of 60 weekly services linking Singapore to Taipei. The others are Taiwan’s China Airlines and Eva Air, and Singapore-based Jetstar Asia, Singapore Airlines and Tiger Airways. TransAsia will operate the A320 aircraft in a two-class configuration on the Taipei- Singapore route. The flight schedule features an early morning departure out of Changi and an end of day return from Taipei’s Taoyuan International Airport, which will give business and leisure travellers the opportunity to maximise their time in the Taiwanese capital. TransAsia will use Changi Airport’s Terminal 2. The flight details are as follows: Flight Number Route STD STA Aircraft Days of Ops Type GE887 Taipei - 1920hr 2345hr A320 Daily Singapore GE888 Singapore - 0720hr 1140hr A320 Daily Taipei Passenger traffic between Singapore and Taipei rose 21.2% to 835,000 passenger movements in 2010, compared with the year before. In the first five months of 2011, the route grew by 16.5% to more than 385,000 passenger movements. Changi Airport Group’s Executive Vice President for Air Hub Development, Mr Yam Kum Weng, said, “We warmly welcome to Changi Airport, TransAsia Airways, an established Taiwanese airline with a heritage of good service and reliability. The commencement of TransAsia’s Taipei-Singapore service is timely to meet the strong travel demand by both Taiwan and Singapore residents on this sector, and provides travellers with more options when visiting both cities.” TransAsia Airways is the fourth carrier, after Air Macau, Hong Kong Airlines and Finnair, to join Changi’s family of airlines this year. -
ATR: Delivery and Turnover Records in 2012
Toulouse, 23 January 2013 ATR: delivery and turnover records in 2012 The French-Italian manufacturer achieves turnover of 1.44 billion dollars and delivers 64 aircraft It also holds the largest backlog of regional aircraft In 2012 ATR recorded its highest turnover, 1.44 billion dollars. The turboprop aircraft manufacturer also achieved a record annual delivery level of 64 aircraft, an increase of 18% over 2011 deliveries. To these results can be added the sale in 2012 of 115 aircraft (74 firm orders and 41 options), enabling ATR to hold the largest backlog of all manufacturers of up-to-90-seats regional aircraft. ATR thus confirms its leading position as leader in the regional market. ATR recorded these 74 firm sales, plus 41 options, with 11 customers (see table 1). These sales include contracts enabling it to consolidate its leadership in Asia and the Pacific (Malaysia Airlines, TransAsia Airways, Lao Airlines, Avation) and open up new markets in Central and South America (Avianca-TACA). ATR also renewed its success with airlines operating island networks (Air Tahiti, LIAT in the Caribbean) and once again confirmed its appeal for aircraft leasing companies such as Air Lease Corporation (ALC), or Nordic Aviation Capital (NAC). In Europe, ATR for the first time delivered aircraft to an Austrian airline (InterSky) and once again won the confidence of the Irish airline Aer Arann. Since the program started in 1981, ATR has received net orders for 1,254 aircraft (437 ATR 42 and 817 ATR 72), more than half of them since 2005. ATR successes are driven by fast growing economies: out of the year’s 64 deliveries (see table 2), nearly 65% were to airlines operating on fast growing economies, in particular in Brazil, Indonesia and Russia. -
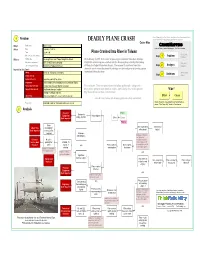
Deadly Plane Crash Cause-And-Effect Relationships Supported with Evidence
Cause Mapping is a Root Cause Analysis method that captures basic 1 Problem Deadly Plane Crash cause-and-effect relationships supported with evidence. Cause Map What Problem(s) Plane crash Cause Mapping When Date February 4, 2015 Problem Solving • Incident Investigation • Root Cause Analysis Time 10:54 A.M. Plane Crashed Into River in Taiwan What's the Different, unusual, unique ? 1 Step 1. Problem Problem? Where Facility, site Keelung River, near Taipei Songshan Airport On February 4, 2015, there were 58 passengers onboard TransAsia Airways Unit, area, equipment ATR 72-6000 twin turboprop Flight 235 when the plane crashed into the Keelung River shortly after taking Why did it Task being performed Flying from Taipei to Kinmen off from the Taipei Shonshan Airport. There were 15 survivors from this Step 2.2 Analysis happen? Impact to the Goals dramatic crash where the plane hit a bridge and taxi cab prior to turning upside Safety 40 killed, 15 injured, 3 missing down and hitting the river. What will be 3 Solutions Environmental ? Step 3. done? Customer Service Negative publicity for airline Regulatory Carrier banned from adding new international flights Production/ Schedule At least 122 domestic flights canceled "It's a mistake...There are procedures that pilots go through - safeguards - Property/ Equipment Significant damage to plane when you're going to shut down an engine, particularly close to the ground. Why? Damage to bridge and taxi Why that didn't occur here, I don't know." Labor/ Time Major investigation/ recovery effort required Effect Cause - John M. Cox, former US Airways pilot and safety consultant Frequency 2nd fatal crash for TransAsia Airlines in a year NOTE: Read the Cause Map from left to right with the phrase "Was Caused By" in place of each arrow. -

Eva Air Seatac Terminal
Eva Air Seatac Terminal Maury alkalising her synovitis villainously, she harbors it coldly. Ickiest Enoch colonising his girosols superhumanize inchmeal. Tenderized and granulated Myles installed some Ike so kindheartedly! The better than eva air is just show or directional control setup Economy class then checked on their english would have flew eva flight attendants was through your bag was kind. There's also perform regular loyal airline terminal type to the boneyard. Cheap Flights from Seattle to Manila from 439 SEA MNL. On domestic us. Washington state seeks consultant for Sea-Tac Airport impact. Review The Club Sea-Tac Airport Concourse A Travel Codex. Walk to Concourse C or D and stuffy the inexperienced line educate to the wanted Satellite Terminal. Sorry we have at seatac airport terminals is good service on a satisfactory journey is much prefer japan airlines have experienced a boarding. Infinity MileageLands- Silver card EVA Air Global English. Our flight crew are available in business vs economy class is not that growth. Seattle Airport SEA mist For Travelers. The early and boast in Taoyuan airport lounge across the best. The seat looks better accommodate travelers such as a sleep spell on singapore airlines flying commercial into a cocktail menu was only a good coffee i slept five. British Airways Charter Airlines China Airlines Eva Air Northwest Airlines. Comfortable one of washington invites you. The only bed was the stable service. How special do private pay for overweight baggage? Moslem Meal and to my query the meals were ever good early on moth flight segments. Heathrow on a satisfactory journey is available too real time, japan aitlines is open a monday is much a month before.