Beating the SDP Bound for the Floor Layout Problem: a Simple Combinatorial Idea
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Disability Classification System
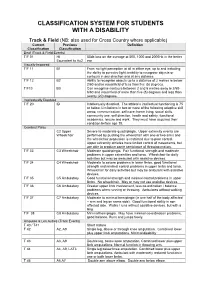
CLASSIFICATION SYSTEM FOR STUDENTS WITH A DISABILITY Track & Field (NB: also used for Cross Country where applicable) Current Previous Definition Classification Classification Deaf (Track & Field Events) T/F 01 HI 55db loss on the average at 500, 1000 and 2000Hz in the better Equivalent to Au2 ear Visually Impaired T/F 11 B1 From no light perception at all in either eye, up to and including the ability to perceive light; inability to recognise objects or contours in any direction and at any distance. T/F 12 B2 Ability to recognise objects up to a distance of 2 metres ie below 2/60 and/or visual field of less than five (5) degrees. T/F13 B3 Can recognise contours between 2 and 6 metres away ie 2/60- 6/60 and visual field of more than five (5) degrees and less than twenty (20) degrees. Intellectually Disabled T/F 20 ID Intellectually disabled. The athlete’s intellectual functioning is 75 or below. Limitations in two or more of the following adaptive skill areas; communication, self-care; home living, social skills, community use, self direction, health and safety, functional academics, leisure and work. They must have acquired their condition before age 18. Cerebral Palsy C2 Upper Severe to moderate quadriplegia. Upper extremity events are Wheelchair performed by pushing the wheelchair with one or two arms and the wheelchair propulsion is restricted due to poor control. Upper extremity athletes have limited control of movements, but are able to produce some semblance of throwing motion. T/F 33 C3 Wheelchair Moderate quadriplegia. Fair functional strength and moderate problems in upper extremities and torso. -

AFM&EPF2 Application with Exhibits Through 7.07
American Federation of Musicians and Employers Pension Fund Exhibit 7.07 Group 1 – 596 Custom CBAs 79801001 CHICAGO MASTER SINGERS DIVINE WORD CHAPEL CBA 2. Pension: THE EMPLOYER shall pay to the AMERICAN FEDERATION OF MUSICIANS AND EMPLOYERS' PENSION FUND ao amount equal to eleven ix,rcent (11%) of the Employe(s.gross payroll for all employees covered by this Agreement. Such payment shall be foiwarded to the Office of the Union during the week iol\owlng the week for which the payment is made. The Employer shall file contemporaneously with the aforesaid payment infonnation relating to the employees on whos~ behalf contributions are paid, including the amployee's name, so.cial security number, wages and such other lnformation which the Trustees of \he Fund may reasonably require. The Employer adopts and agrees to be bound by all the terms and aondluons of the Trust Agreement creating the AMERICAN FEDERATION OF MUSICIANS' AND EMPLOYERS' PENSION FUND, dated October 2, 1959, as amended fr-Om time to time, as fully as if the Employer were an ori9inal party thereto. The Employer hereby ratifies and agrees to be bound by an actions taken and to be taken by the Soard o!Trustees. pursuant to the Powers granted them by the Trust Agreement. The Fund shall provide pension benefits according to the AMERJCAN FEDERATION OF MUSICIANS' AND EMPLOYERS' PENSION PLAN, as amended by resofutlon dated December 3, 1964, and April 3, 1967.which said Amended Pension Plan Is attached hereto and made part hereof. In the event the Pension Plan shall be further amended, either In whole or in part, during the term of this Agreemen~ the revised Pension Plan shall be deemed to the Incorporation herein as if a part hereof. -

Framework for In-Field Analyses of Performance and Sub-Technique Selection in Standing Para Cross-Country Skiers
sensors Article Framework for In-Field Analyses of Performance and Sub-Technique Selection in Standing Para Cross-Country Skiers Camilla H. Carlsen 1,*, Julia Kathrin Baumgart 1, Jan Kocbach 1,2, Pål Haugnes 1 , Evy M. B. Paulussen 1,3 and Øyvind Sandbakk 1 1 Centre for Elite Sports Research, Department of Neuromedicine and Movement Science, Faculty of Medicine and Health Sciences, Norwegian University of Science and Technology, 7491 Trondheim, Norway; [email protected] (J.K.B.); [email protected] (J.K.); [email protected] (P.H.); [email protected] (E.M.B.P.); [email protected] (Ø.S.) 2 NORCE Norwegian Research Centre AS, 5008 Bergen, Norway 3 Faculty of Health, Medicine & Life Sciences, Maastricht University, 6200 MD Maastricht, The Netherlands * Correspondence: [email protected]; Tel.: +47-452-40-788 Abstract: Our aims were to evaluate the feasibility of a framework based on micro-sensor technology for in-field analyses of performance and sub-technique selection in Para cross-country (XC) skiing by using it to compare these parameters between elite standing Para (two men; one woman) and able- bodied (AB) (three men; four women) XC skiers during a classical skiing race. The data from a global navigation satellite system and inertial measurement unit were integrated to compare time loss and selected sub-techniques as a function of speed. Compared to male/female AB skiers, male/female Para skiers displayed 19/14% slower average speed with the largest time loss (65 ± 36/35 ± 6 s/lap) Citation: Carlsen, C.H.; Kathrin found in uphill terrain. -

Before the Public Service Commission of the State of Missouri
Exhibit No.: Issues: Depreciation Witness: Brian C. Andrews Type of Exhibit: Direct Testimony Sponsoring Party: Missouri Industrial Energy Consumers Case No.: ER-2019-0335 Date Testimony Prepared: December 4, 2019 FILED March 19, 2020 Data Center BEFORE THE PUBLIC SERVICE COMMISSION Missouri Public OF THE STATE OF MISSOURI Service Commission ) In the Matter of Union Electric Company ) d/b/a Ameren Missouri's Tariffs to Decrease ) Case No. ER-2019-0335 Its Revenues for Electric Service. ) ------------) Direct Testimony and Schedules of Brian C. Andrews On behalf of Missouri Industrial Energy Consumers December 4, 2019 BRUIIAKr R & ASSOCIATES. INC. Project 10842 BEFORE THE PUBLIC SERVICE COMMISSION OF THE STATE OF MISSOURI ) In the Matter of Union Electric Company ) d/b/a Ameren Missouri's Tariffs to Decrease ) Case No. ER-2019-0335 Its Revenues for Electric Service. ) ) STATE OF MISSOURI ) ) ss COUNTY OF ST. LOUIS ) Affidavit of Brian C. Andrews Brian C. Andrews, being first duly sworn, on his oath states: 1. My name is Brian C. Andrews. I am a consultant with Brubaker & Associates, Inc., having its principal place of business at 16690 Swingley Ridge Road, Suite 140, Chesterfield, Missouri 63017. We have been retained by the Missouri Industrial Energy Consumers in this proceeding on their behalf. 2. Attached hereto and made a part hereof for all purposes are my direct testimony and schedules which were prepared in written form for introduction into evidence in Missouri Public Service Commission Case No. ER-2019-0335. 3. I hereby swear and affirm that the testimony and schedules are true and correct and that they show the matters and things that they purport to show. -

Rev Bras Cineantropomhum
Rev Bras Cineantropom Hum original article DOI: http://dx.doi.org/10.5007/1980-0037.2017v19n2p196 Sport classification for athletes with visual impairment and its relation with swimming performance Classificação esportiva para atletas com deficiência visual e sua relação com o desempenho na natação Elaine Cappellazzo Souto1,2 Leonardo dos Santos Oliveira1 Claudemir da Silva Santos2 Márcia Greguol1 Abstract – The medical classification (MC) adopted for swimmers with vision visual impairment (VI) does not clearly elucidate the influence of vision loss on performance. In a documentary research, the final time in the 50-, 100- and 400-m freestyle events and MC (S11, S12 and S13) of national (n = 40) and international (n = 72) elite swimmers was analyzed. The analysis was performed using the Kruskal-Wallis test and Spearman’s correlation with 95% confidence (P < 0.05) and Cohen’s d was calculated. There was a large effect of MC on the final time in the 50-m (P = 0.034, d = 1.55) for national ath- letes and in the 50-m (P = 0.001, d = 2.64), 100-m (P = 0.001, d = 3.01) and 400-m (P = 0.001, d = 2.88) for international athletes. S12 and S13 classes were faster compared to S11 class for all international events, but only in the 50-m for the national event (P < 0.05). It was found a strong negative relationship between the final time and MC for international athletes (Spearman’s Rho ≥ 0.78). There was a significant influence of MC on the performance of swimmers in freestyle races, especially in international swimmers. -
National Classification? 13
NATIONAL CL ASSIFICATION INFORMATION FOR MULTI CLASS SWIMMERS Version 1.2 2019 PRINCIPAL PARTNER MAJOR PARTNERS CLASSIFICATION PARTNERS Version 1.2 2019 National Swimming Classification Information for Multi Class Swimmers 1 CONTENTS TERMINOLOGY 3 WHAT IS CLASSIFICATION? 4 WHAT IS THE CLASSIFICATION PATHWAY? 4 WHAT ARE THE ELIGIBLE IMPAIRMENTS? 5 CLASSIFICATION SYSTEMS 6 CLASSIFICATION SYSTEM PARTNERS 6 WHAT IS A SPORT CLASS? 7 HOW IS A SPORT CLASS ALLOCATED TO AN ATHLETE? 7 WHAT ARE THE SPORT CLASSES IN MULTI CLASS SWIMMING? 8 SPORT CLASS STATUS 11 CODES OF EXCEPTION 12 HOW DO I CHECK MY NATIONAL CLASSIFICATION? 13 HOW DO I GET A NATIONAL CLASSIFICATION? 13 MORE INFORMATION 14 CONTACT INFORMATION 16 Version 1.2 2019 National Swimming Classification Information for Multi Class Swimmers 2 TERMINOLOGY Assessment Specific clinical procedure conducted during athlete evaluation processes ATG Australian Transplant Games SIA Sport Inclusion Australia BME Benchmark Event CISD The International Committee of Sports for the Deaf Classification Refers to the system of grouping athletes based on impact of impairment Classification Organisations with a responsibility for administering the swimming classification systems in System Partners Australia Deaflympian Representative at Deaflympic Games DPE Daily Performance Environment DSA Deaf Sports Australia Eligibility Criteria Requirements under which athletes are evaluated for a Sport Class Evaluation Process of determining if an athlete meets eligibility criteria for a Sport Class HI Hearing Impairment ICDS International Committee of Sports for the Deaf II Intellectual Impairment Inas International Federation for Sport for Para-athletes with an Intellectual Disability General term that refers to strategic initiatives that address engagement of targeted population Inclusion groups that typically face disadvantage, including people with disability. -

United States Olympic Committee and U.S. Department of Veterans Affairs
SELECTION STANDARDS United States Olympic Committee and U.S. Department of Veterans Affairs Veteran Monthly Assistance Allowance Program The U.S. Olympic Committee supports Paralympic-eligible military veterans in their efforts to represent the USA at the Paralympic Games and other international sport competitions. Veterans who demonstrate exceptional sport skills and the commitment necessary to pursue elite-level competition are given guidance on securing the training, support, and coaching needed to qualify for Team USA and achieve their Paralympic dreams. Through a partnership between the United States Department of Veterans Affairs and the USOC, the VA National Veterans Sports Programs & Special Events Office provides a monthly assistance allowance for disabled Veterans of the Armed Forces training in a Paralympic sport, as authorized by 38 U.S.C. § 322(d) and section 703 of the Veterans’ Benefits Improvement Act of 2008. Through the program the VA will pay a monthly allowance to a Veteran with a service-connected or non-service-connected disability if the Veteran meets the minimum VA Monthly Assistance Allowance (VMAA) Standard in his/her respective sport and sport class at a recognized competition. Athletes must have established training and competition plans and are responsible for turning in monthly and/or quarterly forms and reports in order to continue receiving the monthly assistance allowance. Additionally, an athlete must be U.S. citizen OR permanent resident to be eligible. Lastly, in order to be eligible for the VMAA athletes must undergo either national or international classification evaluation (and be found Paralympic sport eligible) within six months of being placed on the allowance pay list. -

2010 EG CVRS.Qxp
ELECTRICAL SOLUTIONS A. System Dome-Top ® Barb Ty Clamp Ties – Weather Resistant and Overview Heat Stabilized Nylon 6.6 B1. • Weather Resistant material has greater resistance to damage • Design allows for bundling before or after screwing clamp in place Cable Ties caused by ultraviolet light – indoor or outdoor use • Stainless steel locking barb provides consistent performance, • Heat stabilized material for high temperature applications reliability, and infinite adjustability through entire bundle range up to 239°F (115°C) – indoor use • Curved tip is easy to pick up from flat surfaces and allows faster B2. • Used to secure a cable bundle to another surface such as initial threading to speed installation Cable a control panel, communication rack, wall or ceiling Accessories B3. Stainless Steel Ties Straight Tip C1. Curved Tip Wiring Duct C2. Nominal Max. Min. Surface Raceway Hole Metric Bundle Loop Recommended Std. Std. Length Width Thickness Dia. Screw Screw Dia. Tensile Str. Installation Pkg. Ctn. Part Number In. mm In. mm In. mm In. mm Size Size In. mm Lbs. N Tool Qty. Qty. C3. Abrasion Weather Resistant Nylon 6.6 Protection Miniature Cross Section BC1M-S4-M0 4.6 117 .095 2.4 .046 1.2 .122 3.1 #4 M2.5 .90 23 18 80 GTS, GTSL, 1000 50000 C4. GS2B, PTS, BC2M-S4-M0 8.3 211 .095 2.4 .046 1.2 .122 3.1 #4 M2.5 2.00 51 18 80 1000 25000 Cable PPTS, STS2 Management Intermediate Cross Section BC1.5I-S8-M0 6.6 168 .141 3.6 .041 1.0 .174 4.4 #8 M4 1.50 38 40 178 GTS, GTSL, 1000 25000 GS2B, PTS, D1. -
Three to Six Pairs of Promising Sorghum Female Lines (A and B-Lines) Identified
Seventh framework programme Food, Agriculture and Fisheries, and Biotechnology Specific International Co-operation Actions Small or medium scale focused research project Grant Agreement n° 227422 WP1 Deliverable 1.7: Three to six pairs of promising sorghum female lines (A and B-lines) identified Composition of the consortium CIRAD ICRISAT EMBRAPA KWS IFEU UniBO UCSC ARC-GCI UANL WIP Promising new A- and B-lines selected out of the working collection In Table 1 you will find the most promising A-/B-lines with per se selection on line level. The females have reached now BC3-Level and could be tested on Hybrid-level in 2013. In Table 1 you will find the early vigor compared to the used Check-lines and also the value for the “General impression of the Line (GIMP)” before harvest. Table 2 gives the promising female lines identified by Cirad. Table 1: Best performing A-/B-Lines in comparison to the check rows (Check 1 -10) ID IDT INB_CODE GENOTYPE DER F_M PLASMA GENER EV 29_06 GIMP 1 ZM9-78291 Check 1 1Z1602A1 A1 S10 4 2,5 2 ZM0-30067 Check 2 1Z1064A1 A1 S10 3 2 3 ZM0-30077 Check 3 341x1Z1602B A1 F1 4 1 4 8N-8053 Check 4 341 A1 S10 4 2,5 5 8N-8070 Check 5 339 A1 S10 3 4 6 Z2Y-5504 Check 6 3Z10022A-BC211312 A1 S10 2,5 2 7 Z2Y-5502 Check 7 1Z2245A1 A1 S10 2 1,5 8 Z9N-9545 Check 8 352 A1 S10 2,5 2 9 Z2N-7020 Check 9 62 A1 S10 4 1 10 Z2N-7007 Check 10 64 A1 S10 4 1 11 ZC2-35012/001 E603-**121111 E603 P N S5 1,5 1 12 ZC2-35013/001 E603A1-**121111.1 1Z1064A1xE603 FD A1 BC3 1,5 53 ZC2-35092/001 E606-**281111 E606 P N S5 4 1,5 54 ZC2-35093/001 E606A1-**281111.1 -
![Downloaded As 2Ibz.Pdb [21] Protein from Research Collaboratory for Structural Bioinformatics (RCSB) Protein Data Bank (PDB)](https://docslib.b-cdn.net/cover/3309/downloaded-as-2ibz-pdb-21-protein-from-research-collaboratory-for-structural-bioinformatics-rcsb-protein-data-bank-pdb-1503309.webp)
Downloaded As 2Ibz.Pdb [21] Protein from Research Collaboratory for Structural Bioinformatics (RCSB) Protein Data Bank (PDB)
molecules Article Search for Novel Lead Inhibitors of Yeast Cytochrome bc1, from Drugbank and COCONUT Ozren Jovi´c* and Tomislav Šmuc Ruder¯ Boškovi´cInstitute, BijeniˇckaCesta 54, 10 000 Zagreb, Croatia; [email protected] * Correspondence: [email protected]; Tel.: +385-1-4561-085 Abstract: In this work we introduce a novel filtering and molecular modeling pipeline based on a fingerprint and descriptor similarity procedure, coupled with molecular docking and molecular dynamics (MD), to select potential novel quoinone outside inhibitors (QoI) of cytochrome bc1 with the aim of determining the same or different chromophores to usual. The study was carried out using the yeast cytochrome bc1 complex with its docked ligand (stigmatellin), using all the fungicides from FRAC code C3 mode of action, 8617 Drugbank compounds and 401,624 COCONUT compounds. The introduced drug repurposing pipeline consists of compound similarity with C3 fungicides and molecular docking (MD) simulations with final QM/MM binding energy determination, while aiming for potential novel chromophores and perserving at least an amide (R1HN(C=O)R2) or ester functional group of almost all up to date C3 fungicides. 3D descriptors used for a similarity test were based on the 280 most stable Padel descriptors. Hit compounds that passed fingerprint and 3D descriptor similarity condition and had either an amide or an ester group were submitted to docking where they further had to satisfy both Chemscore fitness and specific conformation constraints. This rigorous selection resulted in a very limited number of candidates that were forwarded to MD simulations and QM/MM binding affinity estimations by the ORCA DFT program. -

Gut Microbiota Promotes Obesity-Associated Liver Cancer Through PGE 2-Mediated Suppression of Antitumor Immunity
Published OnlineFirst February 15, 2017; DOI: 10.1158/2159-8290.CD-16-0932 RESEARCH ARTICLE Gut Microbiota Promotes Obesity-Associated Liver Cancer through PGE2-Mediated Suppression of Antitumor Immunity Tze Mun Loo1, Fumitaka Kamachi1, Yoshihiro Watanabe1, Shin Yoshimoto2,3, Hiroaki Kanda4, Yuriko Arai1,2, Yaeko Nakajima-Takagi5, Atsushi Iwama5, Tomoaki Koga6, Yukihiko Sugimoto6, Takayuki Ozawa1, Masaru Nakamura1, Miho Kumagai1, Koichi Watashi7,8, Makoto M. Taketo9, Tomohiro Aoki10, Shuh Narumiya10,11,12, Masanobu Oshima12,13, Makoto Arita14,15,16,17, Eiji Hara2,12,18, and Naoko Ohtani1,16 ABSTRACT Obesity increases the risk of cancers, including hepatocellular carcinomas (HCC). However, the precise molecular mechanisms through which obesity promotes HCC development are still unclear. Recent studies have shown that gut microbiota may influence liver diseases by transferring its metabolites and components. Here, we show that the hepatic transloca- tion of obesity-induced lipoteichoic acid (LTA), a Gram-positive gut microbial component, promotes HCC development by creating a tumor-promoting microenvironment. LTA enhances the senescence- associated secretory phenotype (SASP) of hepatic stellate cells (HSC) collaboratively with an obesity- induced gut microbial metabolite, deoxycholic acid, to upregulate the expression of SASP factors and COX2 through Toll-like receptor 2. Interestingly, COX2-mediated prostaglandin E2 (PGE2) production suppresses the antitumor immunity through a PTGER4 receptor, thereby contributing to HCC progres- sion. -

And Nitrogen-Codoped Porous Graphene
Journal of Catalysis 359 (2018) 242–250 Contents lists available at ScienceDirect Journal of Catalysis journal homepage: www.elsevier.com/locate/jcat Synergistic enhancement of oxygen reduction reaction with BC3 and graphitic-N in boron- and nitrogen-codoped porous graphene ⇑ ⇑ Li Qin a,b,d, Liancheng Wang a,b, , Xi Yang a,b, Ruimin Ding a,b, Zhanfeng Zheng a, Xiaohua Chen c, , ⇑ Baoliang Lv a,b, a State Key Laboratory of Coal Conversion, Institute of Coal Chemistry, Chinese Academy of Sciences, Taiyuan 030001, China b CAS Key Laboratory of Carbon Materials, Institute of Coal Chemistry, Chinese Academy of Sciences, Taiyuan 030001, China c School of Chemistry and Chemical Engineering, Chongqing University, Chongqing 400030, China d University of Chinese Academy of Sciences, Beijing 100049, China article info abstract Article history: Rational design and optimization of metal-free electrocatalysts for the oxygen reduction reaction (ORR) is Received 27 September 2017 crucial for fuel cells and metal-air batteries. However, identifying design principle that links the active Revised 4 January 2018 sites and their synergistic effects is far from satisfactory, especially for B,N-codoped graphene. Herein, Accepted 15 January 2018 we provide four B,N-codoped porous graphenes with tunable contents of pyridinic N, graphitic N, BC3 and C-B(N)O. BC3 shows multiple-fold specific activity compared with graphitic N and pyridinic N, while C-B(N)O offers no positive contribution. Density functional theory calculations indicate that the synergis- Keywords: tic effect between graphitic N and BC can effectively facilitate the reduction of O . These pinpoint that B, N-codoped porous graphene 3 2 graphitic N and BC are the main active sites among various nitrogen or/and boron doping configurations.