COMPUTER ORGANIZATION & ARCHITECTURE Lesson 8
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pipelining and Vector Processing
Chapter 8 Pipelining and Vector Processing 8–1 If the pipeline stages are heterogeneous, the slowest stage determines the flow rate of the entire pipeline. This leads to other stages idling. 8–2 Pipeline stalls can be caused by three types of hazards: resource, data, and control hazards. Re- source hazards result when two or more instructions in the pipeline want to use the same resource. Such resource conflicts can result in serialized execution, reducing the scope for overlapped exe- cution. Data hazards are caused by data dependencies among the instructions in the pipeline. As a simple example, suppose that the result produced by instruction I1 is needed as an input to instruction I2. We have to stall the pipeline until I1 has written the result so that I2 reads the correct input. If the pipeline is not designed properly, data hazards can produce wrong results by using incorrect operands. Therefore, we have to worry about the correctness first. Control hazards are caused by control dependencies. As an example, consider the flow control altered by a branch instruction. If the branch is not taken, we can proceed with the instructions in the pipeline. But, if the branch is taken, we have to throw away all the instructions that are in the pipeline and fill the pipeline with instructions at the branch target. 8–3 Prefetching is a technique used to handle resource conflicts. Pipelining typically uses just-in- time mechanism so that only a simple buffer is needed between the stages. We can minimize the performance impact if we relax this constraint by allowing a queue instead of a single buffer. -

Diploma Thesis
Faculty of Computer Science Chair for Real Time Systems Diploma Thesis Timing Analysis in Software Development Author: Martin Däumler Supervisors: Jun.-Prof. Dr.-Ing. Robert Baumgartl Dr.-Ing. Andreas Zagler Date of Submission: March 31, 2008 Martin Däumler Timing Analysis in Software Development Diploma Thesis, Chemnitz University of Technology, 2008 Abstract Rapid development processes and higher customer requirements lead to increasing inte- gration of software solutions in the automotive industry’s products. Today, several elec- tronic control units communicate by bus systems like CAN and provide computation of complex algorithms. This increasingly requires a controlled timing behavior. The following diploma thesis investigates how the timing analysis tool SymTA/S can be used in the software development process of the ZF Friedrichshafen AG. Within the scope of several scenarios, the benefits of using it, the difficulties in using it and the questions that can not be answered by the timing analysis tool are examined. Contents List of Figures iv List of Tables vi 1 Introduction 1 2 Execution Time Analysis 3 2.1 Preface . 3 2.2 Dynamic WCET Analysis . 4 2.2.1 Methods . 4 2.2.2 Problems . 4 2.3 Static WCET Analysis . 6 2.3.1 Methods . 6 2.3.2 Problems . 7 2.4 Hybrid WCET Analysis . 9 2.5 Survey of Tools: State of the Art . 9 2.5.1 aiT . 9 2.5.2 Bound-T . 11 2.5.3 Chronos . 12 2.5.4 MTime . 13 2.5.5 Tessy . 14 2.5.6 Further Tools . 15 2.6 Examination of Methods . 16 2.6.1 Software Description . -

How Data Hazards Can Be Removed Effectively
International Journal of Scientific & Engineering Research, Volume 7, Issue 9, September-2016 116 ISSN 2229-5518 How Data Hazards can be removed effectively Muhammad Zeeshan, Saadia Anayat, Rabia and Nabila Rehman Abstract—For fast Processing of instructions in computer architecture, the most frequently used technique is Pipelining technique, the Pipelining is consider an important implementation technique used in computer hardware for multi-processing of instructions. Although multiple instructions can be executed at the same time with the help of pipelining, but sometimes multi-processing create a critical situation that altered the normal CPU executions in expected way, sometime it may cause processing delay and produce incorrect computational results than expected. This situation is known as hazard. Pipelining processing increase the processing speed of the CPU but these Hazards that accrue due to multi-processing may sometime decrease the CPU processing. Hazards can be needed to handle properly at the beginning otherwise it causes serious damage to pipelining processing or overall performance of computation can be effected. Data hazard is one from three types of pipeline hazards. It may result in Race condition if we ignore a data hazard, so it is essential to resolve data hazards properly. In this paper, we tries to present some ideas to deal with data hazards are presented i.e. introduce idea how data hazards are harmful for processing and what is the cause of data hazards, why data hazard accord, how we remove data hazards effectively. While pipelining is very useful but there are several complications and serious issue that may occurred related to pipelining i.e. -
Computer Organization
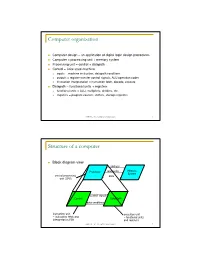
Computer organization Computer design – an application of digital logic design procedures Computer = processing unit + memory system Processing unit = control + datapath Control = finite state machine inputs = machine instruction, datapath conditions outputs = register transfer control signals, ALU operation codes instruction interpretation = instruction fetch, decode, execute Datapath = functional units + registers functional units = ALU, multipliers, dividers, etc. registers = program counter, shifters, storage registers CSE370 - XI - Computer Organization 1 Structure of a computer Block diagram view address Processor read/write Memory System central processing data unit (CPU) control signals Control Data Path data conditions instruction unit execution unit œ instruction fetch and œ functional units interpretation FSM and registers CSE370 - XI - Computer Organization 2 Registers Selectively loaded – EN or LD input Output enable – OE input Multiple registers – group 4 or 8 in parallel LD OE D7 Q7 OE asserted causes FF state to be D6 Q6 connected to output pins; otherwise they D5 Q5 are left unconnected (high impedance) D4 Q4 D3 Q3 D2 Q2 LD asserted during a lo-to-hi clock D1 Q1 transition loads new data into FFs D0 CLK Q0 CSE370 - XI - Computer Organization 3 Register transfer Point-to-point connection MUX MUX MUX MUX dedicated wires muxes on inputs of each register rs rt rd R4 Common input from multiplexer load enables rs rt rd R4 for each register control signals MUX for multiplexer Common bus with output enables output enables and load rs rt rd R4 enables for each register BUS CSE370 - XI - Computer Organization 4 Register files Collections of registers in one package two-dimensional array of FFs address used as index to a particular word can have separate read and write addresses so can do both at same time 4 by 4 register file 16 D-FFs organized as four words of four bits each write-enable (load) 3E RB read-enable (output enable) RA WE (- WB (. -

Review of Computer Architecture
Basic Computer Architecture CSCE 496/896: Embedded Systems Witawas Srisa-an Review of Computer Architecture Credit: Most of the slides are made by Prof. Wayne Wolf who is the author of the textbook. I made some modifications to the note for clarity. Assume some background information from CSCE 430 or equivalent von Neumann architecture Memory holds data and instructions. Central processing unit (CPU) fetches instructions from memory. Separate CPU and memory distinguishes programmable computer. CPU registers help out: program counter (PC), instruction register (IR), general- purpose registers, etc. von Neumann Architecture Memory Unit Input CPU Output Unit Control + ALU Unit CPU + memory address 200PC memory data CPU 200 ADD r5,r1,r3 ADD IRr5,r1,r3 Recalling Pipelining Recalling Pipelining What is a potential Problem with von Neumann Architecture? Harvard architecture address data memory data PC CPU address program memory data von Neumann vs. Harvard Harvard can’t use self-modifying code. Harvard allows two simultaneous memory fetches. Most DSPs (e.g Blackfin from ADI) use Harvard architecture for streaming data: greater memory bandwidth. different memory bit depths between instruction and data. more predictable bandwidth. Today’s Processors Harvard or von Neumann? RISC vs. CISC Complex instruction set computer (CISC): many addressing modes; many operations. Reduced instruction set computer (RISC): load/store; pipelinable instructions. Instruction set characteristics Fixed vs. variable length. Addressing modes. Number of operands. Types of operands. Tensilica Xtensa RISC based variable length But not CISC Programming model Programming model: registers visible to the programmer. Some registers are not visible (IR). Multiple implementations Successful architectures have several implementations: varying clock speeds; different bus widths; different cache sizes, associativities, configurations; local memory, etc. -

V850ES/SA2, V850ES/SA3 32-Bit Single-Chip Microcontrollers
To our customers, Old Company Name in Catalogs and Other Documents On April 1st, 2010, NEC Electronics Corporation merged with Renesas Technology Corporation, and Renesas Electronics Corporation took over all the business of both companies. Therefore, although the old company name remains in this document, it is a valid Renesas Electronics document. We appreciate your understanding. Renesas Electronics website: http://www.renesas.com April 1st, 2010 Renesas Electronics Corporation Issued by: Renesas Electronics Corporation (http://www.renesas.com) Send any inquiries to http://www.renesas.com/inquiry. Notice 1. All information included in this document is current as of the date this document is issued. Such information, however, is subject to change without any prior notice. Before purchasing or using any Renesas Electronics products listed herein, please confirm the latest product information with a Renesas Electronics sales office. Also, please pay regular and careful attention to additional and different information to be disclosed by Renesas Electronics such as that disclosed through our website. 2. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others. 3. You should not alter, modify, copy, or otherwise misappropriate any Renesas Electronics product, whether in whole or in part. 4. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. -

Pipelining: Basic Concepts and Approaches
International Journal of Scientific & Engineering Research, Volume 7, Issue 4, April-2016 1197 ISSN 2229-5518 Pipelining: Basic Concepts and Approaches RICHA BAIJAL1 1Student,M.Tech,Computer Science And Engineering Career Point University,Alaniya,Jhalawar Road,Kota-325003 (Rajasthan) Abstract-This paper is concerned with the pipelining principles while designing a processor.The basics of instruction pipeline are discussed and an approach to minimize a pipeline stall is explained with the help of example.The main idea is to understand the working of a pipeline in a processor.Various hazards that cause pipeline degradation are explained and solutions to minimize them are discussed. Index Terms— Data dependency, Hazards in pipeline, Instruction dependency, parallelism, Pipelining, Processor, Stall. —————————— —————————— 1 INTRODUCTION does the paint. Still,2 rooms are idle. These rooms that I want to paint constitute my hardware.The painter and his skills are the objects and the way i am using them refers to the stag- O understand what pipelining is,let us consider the as- T es.Now,it is quite possible i limit my resources,i.e. I just have sembly line manufacturing of a car.If you have ever gone to a two buckets of paint at a time;therefore,i have to wait until machine work shop ; you might have seen the different as- these two stages give me an output.Although,these are inde- pendent tasks,but what i am limiting is the resources. semblies developed for developing its chasis,adding a part to I hope having this comcept in mind,now the reader -
Powerpc 601 RISC Microprocessor Users Manual
MPR601UM-01 MPC601UM/AD PowerPC™ 601 RISC Microprocessor User's Manual CONTENTS Paragraph Page Title Number Number About This Book Audience .............................................................................................................. xlii Organization......................................................................................................... xlii Additional Reading ............................................................................................. xliv Conventions ........................................................................................................ xliv Acronyms and Abbreviations ............................................................................. xliv Terminology Conventions ................................................................................. xlvii Chapter 1 Overview 1.1 PowerPC 601 Microprocessor Overview............................................................. 1-1 1.1.1 601 Features..................................................................................................... 1-2 1.1.2 Block Diagram................................................................................................. 1-3 1.1.3 Instruction Unit................................................................................................ 1-5 1.1.3.1 Instruction Queue......................................................................................... 1-5 1.1.4 Independent Execution Units.......................................................................... -

Testing and Validation of a Prototype Gpgpu Design for Fpgas Murtaza Merchant University of Massachusetts Amherst
University of Massachusetts Amherst ScholarWorks@UMass Amherst Masters Theses 1911 - February 2014 2013 Testing and Validation of a Prototype Gpgpu Design for FPGAs Murtaza Merchant University of Massachusetts Amherst Follow this and additional works at: https://scholarworks.umass.edu/theses Part of the VLSI and Circuits, Embedded and Hardware Systems Commons Merchant, Murtaza, "Testing and Validation of a Prototype Gpgpu Design for FPGAs" (2013). Masters Theses 1911 - February 2014. 1012. Retrieved from https://scholarworks.umass.edu/theses/1012 This thesis is brought to you for free and open access by ScholarWorks@UMass Amherst. It has been accepted for inclusion in Masters Theses 1911 - February 2014 by an authorized administrator of ScholarWorks@UMass Amherst. For more information, please contact [email protected]. TESTING AND VALIDATION OF A PROTOTYPE GPGPU DESIGN FOR FPGAs A Thesis Presented by MURTAZA S. MERCHANT Submitted to the Graduate School of the University of Massachusetts Amherst in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE IN ELECTRICAL AND COMPUTER ENGINEERING February 2013 Department of Electrical and Computer Engineering © Copyright by Murtaza S. Merchant 2013 All Rights Reserved TESTING AND VALIDATION OF A PROTOTYPE GPGPU DESIGN FOR FPGAs A Thesis Presented by MURTAZA S. MERCHANT Approved as to style and content by: _________________________________ Russell G. Tessier, Chair _________________________________ Wayne P. Burleson, Member _________________________________ Mario Parente, Member ______________________________ C. V. Hollot, Department Head Electrical and Computer Engineering ACKNOWLEDGEMENTS To begin with, I would like to sincerely thank my advisor, Prof. Russell Tessier for all his support, faith in my abilities and encouragement throughout my tenure as a graduate student. -

The Microarchitecture of the Pentium 4 Processor
The Microarchitecture of the Pentium 4 Processor Glenn Hinton, Desktop Platforms Group, Intel Corp. Dave Sager, Desktop Platforms Group, Intel Corp. Mike Upton, Desktop Platforms Group, Intel Corp. Darrell Boggs, Desktop Platforms Group, Intel Corp. Doug Carmean, Desktop Platforms Group, Intel Corp. Alan Kyker, Desktop Platforms Group, Intel Corp. Patrice Roussel, Desktop Platforms Group, Intel Corp. Index words: Pentium® 4 processor, NetBurst™ microarchitecture, Trace Cache, double-pumped ALU, deep pipelining provides an in-depth examination of the features and ABSTRACT functions of the Intel NetBurst microarchitecture. This paper describes the Intel® NetBurst™ ® The Pentium 4 processor is designed to deliver microarchitecture of Intel’s new flagship Pentium 4 performance across applications where end users can truly processor. This microarchitecture is the basis of a new appreciate and experience its performance. For example, family of processors from Intel starting with the Pentium it allows a much better user experience in areas such as 4 processor. The Pentium 4 processor provides a Internet audio and streaming video, image processing, substantial performance gain for many key application video content creation, speech recognition, 3D areas where the end user can truly appreciate the applications and games, multi-media, and multi-tasking difference. user environments. The Pentium 4 processor enables real- In this paper we describe the main features and functions time MPEG2 video encoding and near real-time MPEG4 of the NetBurst microarchitecture. We present the front- encoding, allowing efficient video editing and video end of the machine, including its new form of instruction conferencing. It delivers world-class performance on 3D cache called the Execution Trace Cache. -

Implementation, Verification and Validation of an Openrisc-1200
(IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 10, No. 1, 2019 Implementation, Verification and Validation of an OpenRISC-1200 Soft-core Processor on FPGA Abdul Rafay Khatri Department of Electronic Engineering, QUEST, NawabShah, Pakistan Abstract—An embedded system is a dedicated computer system in which hardware and software are combined to per- form some specific tasks. Recent advancements in the Field Programmable Gate Array (FPGA) technology make it possible to implement the complete embedded system on a single FPGA chip. The fundamental component of an embedded system is a microprocessor. Soft-core processors are written in hardware description languages and functionally equivalent to an ordinary microprocessor. These soft-core processors are synthesized and implemented on the FPGA devices. In this paper, the OpenRISC 1200 processor is used, which is a 32-bit soft-core processor and Fig. 1. General block diagram of embedded systems. written in the Verilog HDL. Xilinx ISE tools perform synthesis, design implementation and configure/program the FPGA. For verification and debugging purpose, a software toolchain from (RISC) processor. This processor consists of all necessary GNU is configured and installed. The software is written in C components which are available in any other microproces- and Assembly languages. The communication between the host computer and FPGA board is carried out through the serial RS- sor. These components are connected through a bus called 232 port. Wishbone bus. In this work, the OR1200 processor is used to implement the system on a chip technology on a Virtex-5 Keywords—FPGA Design; HDLs; Hw-Sw Co-design; Open- FPGA board from Xilinx. -

Python Console Target Device 78K0 Microcontroller RL78 Family 78K0R Microcontroller V850 Family RX Family RH850 Family
User’s Manual CS+ V4.01.00 Integrated Development Environment User’s Manual: Python Console Target Device 78K0 Microcontroller RL78 Family 78K0R Microcontroller V850 Family RX Family RH850 Family All information contained in these materials, including products and product specifications, represents information on the product at the time of publication and is subject to change by Renesas Electronics Corp. without notice. Please review the latest information published by Renesas Electronics Corp. through various means, including the Renesas Electronics Corp. website (http://www.renesas.com). www.renesas.com Rev.1.00 2016.09 Notice 1. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. You are fully responsible for the incorporation of these circuits, software, and information in the design of your equipment. Renesas Electronics assumes no responsibility for any losses incurred by you or third parties arising from the use of these circuits, software, or information. 2. Renesas Electronics has used reasonable care in preparing the information included in this document, but Renesas Electronics does not warrant that such information is error free. Renesas Electronics assumes no liability whatsoever for any damages incurred by you resulting from errors in or omissions from the information included herein. 3. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others.