Reference Systems in Satellite Geodesy
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Low Thrust Manoeuvres to Perform Large Changes of RAAN Or Inclination in LEO
Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Aerospaziale Master Thesis Low Thrust Manoeuvres To Perform Large Changes of RAAN or Inclination in LEO Academic Tutor: Prof. Lorenzo CASALINO Candidate: Filippo GRISOT July 2018 “It is possible for ordinary people to choose to be extraordinary” E. Musk ii Filippo Grisot – Master Thesis iii Filippo Grisot – Master Thesis Acknowledgments I would like to address my sincere acknowledgments to my professor Lorenzo Casalino, for your huge help in these moths, for your willingness, for your professionalism and for your kindness. It was very stimulating, as well as fun, working with you. I would like to thank all my course-mates, for the time spent together inside and outside the “Poli”, for the help in passing the exams, for the fun and the desperation we shared throughout these years. I would like to especially express my gratitude to Emanuele, Gianluca, Giulia, Lorenzo and Fabio who, more than everyone, had to bear with me. I would like to also thank all my extra-Poli friends, especially Alberto, for your support and the long talks throughout these years, Zach, for being so close although the great distance between us, Bea’s family, for all the Sundays and summers spent together, and my soccer team Belfiga FC, for being the crazy lovable people you are. A huge acknowledgment needs to be address to my family: to my grandfather Luciano, for being a great friend; to my grandmother Bianca, for teaching me what “fighting” means; to my grandparents Beppe and Etta, for protecting me -
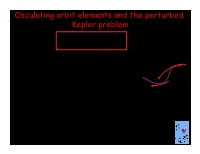
Osculating Orbit Elements and the Perturbed Kepler Problem
Osculating orbit elements and the perturbed Kepler problem Gmr a = 3 + f(r, v,t) Same − r x & v Define: r := rn ,r:= p/(1 + e cos f) ,p= a(1 e2) − osculating orbit he sin f h v := n + λ ,h:= Gmp p r n := cos ⌦cos(! + f) cos ◆ sinp ⌦sin(! + f) e − X +⇥ sin⌦cos(! + f) + cos ◆ cos ⌦sin(! + f⇤) eY actual orbit +sin⇥ ◆ sin(! + f) eZ ⇤ λ := cos ⌦sin(! + f) cos ◆ sin⌦cos(! + f) e − − X new osculating + sin ⌦sin(! + f) + cos ◆ cos ⌦cos(! + f) e orbit ⇥ − ⇤ Y +sin⇥ ◆ cos(! + f) eZ ⇤ hˆ := n λ =sin◆ sin ⌦ e sin ◆ cos ⌦ e + cos ◆ e ⇥ X − Y Z e, a, ω, Ω, i, T may be functions of time Perturbed Kepler problem Gmr a = + f(r, v,t) − r3 dh h = r v = = r f ⇥ ) dt ⇥ v h dA A = ⇥ n = Gm = f h + v (r f) Gm − ) dt ⇥ ⇥ ⇥ Decompose: f = n + λ + hˆ R S W dh = r λ + r hˆ dt − W S dA Gm =2h n h + rr˙ λ rr˙ hˆ. dt S − R S − W Example: h˙ = r S d (h cos ◆)=h˙ e dt · Z d◆ h˙ cos ◆ h sin ◆ = r cos(! + f)sin◆ + r cos ◆ − dt − W S Perturbed Kepler problem “Lagrange planetary equations” dp p3 1 =2 , dt rGm 1+e cos f S de p 2 cos f + e(1 + cos2 f) = sin f + , dt Gm R 1+e cos f S r d◆ p cos(! + f) = , dt Gm 1+e cos f W r d⌦ p sin(! + f) sin ◆ = , dt Gm 1+e cos f W r d! 1 p 2+e cos f sin(! + f) = cos f + sin f e cot ◆ dt e Gm − R 1+e cos f S− 1+e cos f W r An alternative pericenter angle: $ := ! +⌦cos ◆ d$ 1 p 2+e cos f = cos f + sin f dt e Gm − R 1+e cos f S r Perturbed Kepler problem Comments: § these six 1st-order ODEs are exactly equivalent to the original three 2nd-order ODEs § if f = 0, the orbit elements are constants § if f << Gm/r2, use perturbation theory -

Analysis of Perturbations and Station-Keeping Requirements in Highly-Inclined Geosynchronous Orbits
ANALYSIS OF PERTURBATIONS AND STATION-KEEPING REQUIREMENTS IN HIGHLY-INCLINED GEOSYNCHRONOUS ORBITS Elena Fantino(1), Roberto Flores(2), Alessio Di Salvo(3), and Marilena Di Carlo(4) (1)Space Studies Institute of Catalonia (IEEC), Polytechnic University of Catalonia (UPC), E.T.S.E.I.A.T., Colom 11, 08222 Terrassa (Spain), [email protected] (2)International Center for Numerical Methods in Engineering (CIMNE), Polytechnic University of Catalonia (UPC), Building C1, Campus Norte, UPC, Gran Capitan,´ s/n, 08034 Barcelona (Spain) (3)NEXT Ingegneria dei Sistemi S.p.A., Space Innovation System Unit, Via A. Noale 345/b, 00155 Roma (Italy), [email protected] (4)Department of Mechanical and Aerospace Engineering, University of Strathclyde, 75 Montrose Street, Glasgow G1 1XJ (United Kingdom), [email protected] Abstract: There is a demand for communications services at high latitudes that is not well served by conventional geostationary satellites. Alternatives using low-altitude orbits require too large constellations. Other options are the Molniya and Tundra families (critically-inclined, eccentric orbits with the apogee at high latitudes). In this work we have considered derivatives of the Tundra type with different inclinations and eccentricities. By means of a high-precision model of the terrestrial gravity field and the most relevant environmental perturbations, we have studied the evolution of these orbits during a period of two years. The effects of the different perturbations on the constellation ground track (which is more important for coverage than the orbital elements themselves) have been identified. We show that, in order to maintain the ground track unchanged, the most important parameters are the orbital period and the argument of the perigee. -

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -

Geodetic Surveying, Earth Modeling, and the New Geodetic Datum of 2022
Geodetic Surveying, Earth Modeling, and the New Geodetic Datum of 2022 PDH330 3 Hours PDH Academy PO Box 449 Pewaukee, WI 53072 (888) 564-9098 www.pdhacademy.com [email protected] Geodetic Surveying Final Exam 1. Who established the U.S. Coast and Geodetic Survey? A) Thomas Jefferson B) Benjamin Franklin C) George Washington D) Abraham Lincoln 2. Flattening is calculated from what? A) Equipotential surface B) Geoid C) Earth’s circumference D) The semi major and Semi minor axis 3. A Reference Frame is based off how many dimensions? A) two B) one C) four D) three 4. Who published “A Treatise on Fluxions”? A) Einstein B) MacLaurin C) Newton D) DaVinci 5. The interior angles of an equilateral planar triangle adds up to how many degrees? A) 360 B) 270 C) 180 D) 90 6. What group started xDeflec? A) NGS B) CGS C) DoD D) ITRF 7. When will NSRS adopt the new time-based system? A) 2022 B) 2020 C) Unknown due to delays D) 2021 8. Did the State Plane Coordinate System of 1927 have more zones than the State Plane Coordinate System of 1983? A) No B) Yes C) They had the same D) The State Plane Coordinate System of 1927 did not have zones 9. A new element to the State Plane Coordinate System of 2022 is: A) The addition of Low Distortion Projections B) Adjoining tectonic plates C) Airborne gravity collection D) None of the above 10. The model GRAV-D (Gravity for Redefinition of the American Vertical Datum) created will replace _____________ and constitute the new vertical height system of the United States A) Decimal degrees B) Minutes C) NAVD 88 D) All of the above Introduction to Geodetic Surveying The early curiosity of man has driven itself to learn more about the vastness of our planet and the universe. -

Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object
Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object by Nathan C. Shupe B.A., Swarthmore College, 2005 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirements for the degree of Master of Science Department of Aerospace Engineering Sciences 2010 This thesis entitled: Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object written by Nathan C. Shupe has been approved for the Department of Aerospace Engineering Sciences Daniel Scheeres Prof. George Born Assoc. Prof. Hanspeter Schaub Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. iii Shupe, Nathan C. (M.S., Aerospace Engineering Sciences) Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object Thesis directed by Prof. Daniel Scheeres Based on the recommendations of the Augustine Commission, President Obama has pro- posed a vision for U.S. human spaceflight in the post-Shuttle era which includes a manned mission to a Near-Earth Object (NEO). A 2006-2007 study commissioned by the Constellation Program Advanced Projects Office investigated the feasibility of sending a crewed Orion spacecraft to a NEO using different combinations of elements from the latest launch system architecture at that time. The study found a number of suitable mission targets in the database of known NEOs, and pre- dicted that the number of candidate NEOs will continue to increase as more advanced observatories come online and execute more detailed surveys of the NEO population. -

Geodesy in the 21St Century
Eos, Vol. 90, No. 18, 5 May 2009 VOLUME 90 NUMBER 18 5 MAY 2009 EOS, TRANSACTIONS, AMERICAN GEOPHYSICAL UNION PAGES 153–164 geophysical discoveries, the basic under- Geodesy in the 21st Century standing of earthquake mechanics known as the “elastic rebound theory” [Reid, 1910], PAGES 153–155 Geodesy and the Space Era was established by analyzing geodetic mea- surements before and after the 1906 San From flat Earth, to round Earth, to a rough Geodesy, like many scientific fields, is Francisco earthquakes. and oblate Earth, people’s understanding of technology driven. Over the centuries, it In 1957, the Soviet Union launched the the shape of our planet and its landscapes has developed as an engineering discipline artificial satellite Sputnik, ushering the world has changed dramatically over the course because of its practical applications. By the into the space era. During the first 5 decades of history. These advances in geodesy— early 1900s, scientists and cartographers of the space era, space geodetic technolo- the study of Earth’s size, shape, orientation, began to use triangulation and leveling mea- gies developed rapidly. The idea behind and gravitational field, and the variations surements to record surface deformation space geodetic measurements is simple: Dis- of these quantities over time—developed associated with earthquakes and volcanoes. tance or phase measurements conducted because of humans’ curiosity about the For example, one of the most important between Earth’s surface and objects in Earth and because of geodesy’s application to navigation, surveying, and mapping, all of which were very practical areas that ben- efited society. -
NASA Space Geodesy Program: Catalogue of Site Information
NASA Technical Memorandum 4482 NASA Space Geodesy Program: Catalogue of Site Information M. A. Bryant and C. E. Noll March 1993 N93-2137_ (NASA-TM-4482) NASA SPACE GEODESY PROGRAM: CATALOGUE OF SITE INFORMATION (NASA) 688 p Unclas Hl146 0154175 v ,,_r NASA Technical Memorandum 4482 NASA Space Geodesy Program: Catalogue of Site Information M. A. Bryant McDonnell Douglas A erospace Seabro'ok, Maryland C. E. Noll NASA Goddard Space Flight Center Greenbelt, Maryland National Aeronautics and Space Administration Goddard Space Flight Center Greenbelt, Maryland 20771 1993 . _= _qum_ Table of Contents Introduction .......................................... ..... ix Map of Geodetic Sites - Global ................................... xi Map of Geodetic Sites - Europe .................................. xii Map of Geodetic Sites - Japan .................................. xiii Map of Geodetic Sites - North America ............................. xiv Map of Geodetic Sites - Western United States ......................... xv Table of Sites Listed by Monument Number .......................... xvi Acronyms ............................................... xxvi Subscription Application ..................................... xxxii Site Information ............................................. Site Name Site Number Page # ALGONQUIN 67 ............................ 1 AMERICAN SAMOA 91 ............................ 5 ANKARA 678 ............................ 9 AREQUIPA 98 ............................ 10 ASKITES 674 ........................... , 15 AUSTIN 400 ........................... -

Handbook of Satellite Orbits from Kepler to GPS Michel Capderou
Handbook of Satellite Orbits From Kepler to GPS Michel Capderou Handbook of Satellite Orbits From Kepler to GPS Translated by Stephen Lyle Foreword by Charles Elachi, Director, NASA Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California, USA 123 Michel Capderou Universite´ Pierre et Marie Curie Paris, France ISBN 978-3-319-03415-7 ISBN 978-3-319-03416-4 (eBook) DOI 10.1007/978-3-319-03416-4 Springer Cham Heidelberg New York Dordrecht London Library of Congress Control Number: 2014930341 © Springer International Publishing Switzerland 2014 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this pub- lication or parts thereof is permitted only under the provisions of the Copyright Law of the Publisher’s location, in its current version, and permission for use must always be obtained from Springer. Permis- sions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. The use of general descriptive names, registered names, trademarks, service marks, etc. -

Solar Radiation Pressure Models for Beidou-3 I2-S Satellite: Comparison and Augmentation
remote sensing Article Solar Radiation Pressure Models for BeiDou-3 I2-S Satellite: Comparison and Augmentation Chen Wang 1, Jing Guo 1,2 ID , Qile Zhao 1,3,* and Jingnan Liu 1,3 1 GNSS Research Center, Wuhan University, 129 Luoyu Road, Wuhan 430079, China; [email protected] (C.W.); [email protected] (J.G.); [email protected] (J.L.) 2 School of Engineering, Newcastle University, Newcastle upon Tyne NE1 7RU, UK 3 Collaborative Innovation Center of Geospatial Technology, Wuhan University, 129 Luoyu Road, Wuhan 430079, China * Correspondence: [email protected]; Tel.: +86-027-6877-7227 Received: 22 December 2017; Accepted: 15 January 2018; Published: 16 January 2018 Abstract: As one of the most essential modeling aspects for precise orbit determination, solar radiation pressure (SRP) is the largest non-gravitational force acting on a navigation satellite. This study focuses on SRP modeling of the BeiDou-3 experimental satellite I2-S (PRN C32), for which an obvious modeling deficiency that is related to SRP was formerly identified. The satellite laser ranging (SLR) validation demonstrated that the orbit of BeiDou-3 I2-S determined with empirical 5-parameter Extended CODE (Center for Orbit Determination in Europe) Orbit Model (ECOM1) has the sun elongation angle (# angle) dependent systematic error, as well as a bias of approximately −16.9 cm. Similar performance has been identified for European Galileo and Japanese QZSS Michibiki satellite as well, and can be reduced with the extended ECOM model (ECOM2), or by using the a priori SRP model to augment ECOM1. In this study, the performances of the widely used SRP models for GNSS (Global Navigation Satellite System) satellites, i.e., ECOM1, ECOM2, and adjustable box-wing model have been compared and analyzed for BeiDou-3 I2-S satellite. -

Space Geodesy and Satellite Laser Ranging
Space Geodesy and Satellite Laser Ranging Michael Pearlman* Harvard-Smithsonian Center for Astrophysics Cambridge, MA USA *with a very extensive use of charts and inputs provided by many other people Causes for Crustal Motions and Variations in Earth Orientation Dynamics of crust and mantle Ocean Loading Volcanoes Post Glacial Rebound Plate Tectonics Atmospheric Loading Mantle Convection Core/Mantle Dynamics Mass transport phenomena in the upper layers of the Earth Temporal and spatial resolution of mass transport phenomena secular / decadal post -glacial glaciers polar ice post-glacial reboundrebound ocean mass flux interanaual atmosphere seasonal timetime scale scale sub --seasonal hydrology: surface and ground water, snow, ice diurnal semidiurnal coastal tides solid earth and ocean tides 1km 10km 100km 1000km 10000km resolution Temporal and spatial resolution of oceanographic features 10000J10000 y bathymetric global 1000J1000 y structures warming 100100J y basin scale variability 1010J y El Nino Rossby- 11J y waves seasonal cycle eddies timetime scale scale 11M m mesoscale and and shorter scale fronts physical- barotropic 11W w biological variability interaction Coastal upwelling 11T d surface tides internal waves internal tides and inertial motions 11h h 10m 100m 1km 10km 100km 1000km 10000km 100000km resolution Continental hydrology Ice mass balance and sea level Satellite gravity and altimeter mission products help determine mass transport and mass distribution in a multi-disciplinary environment Gravity field missions Oceanic -

Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling
Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling by Zachary James Folcik B.S. Computer Science Michigan Technological University, 2000 SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE IN AERONAUTICS AND ASTRONAUTICS AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY JUNE 2008 © 2008 Massachusetts Institute of Technology. All rights reserved. Signature of Author:_______________________________________________________ Department of Aeronautics and Astronautics May 23, 2008 Certified by:_____________________________________________________________ Dr. Paul J. Cefola Lecturer, Department of Aeronautics and Astronautics Thesis Supervisor Certified by:_____________________________________________________________ Professor Jonathan P. How Professor, Department of Aeronautics and Astronautics Thesis Advisor Accepted by:_____________________________________________________________ Professor David L. Darmofal Associate Department Head Chair, Committee on Graduate Students 1 [This page intentionally left blank.] 2 Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling by Zachary James Folcik Submitted to the Department of Aeronautics and Astronautics on May 23, 2008 in Partial Fulfillment of the Requirements for the Degree of Master of Science in Aeronautics and Astronautics ABSTRACT The development of electric propulsion technology for spacecraft has led to reduced costs and longer lifespans for certain