Autodesk's VEX® Robotics Curriculum Unit 7: Advanced Gears
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Steering System
1 Steering System STEERING SYSTEM The function of steering is to steer the front wheel in response to driver command inputs in order to provide overall directional control of the vehicle. The factors kept in mind while designing the steering system were Simplicity Safety Requiring minimum steer effort Economical Steering geometry Ackerman The Ackerman Steering Principle defines the geometry that is applied to all vehicles (two or four wheel drive) to enable the correct turning angle of the steering wheels to be generated when negotiating a corner or a curve. When a car is travelling around a corner (the red lines represent the path that the wheels follow) the inside wheels of the car follow a smaller diameter circle than the outside wheels. If both the wheels were turned by the same amount, the inside wheel would scrub (effectively sliding sideways) and lessen the effectiveness of the steering. This tire scrubbing, which also creates unwanted heat and wear in the tire, can be eliminated by turning the inside wheel at a greater angle than the outside one. Dept. of Mechanical Engineering 2 Steering System The difference in the angles of the inside and outside wheels may be better understood by studying the diagram, where we have marked the inside and outside radius that each of the tires passes through. The Inside Radius (Ri) and the Outside Radius (Ro) are dependent on a number of factors including the car width and the tightness of the corner the car is intended to pass through. Aligning both wheels in the proper direction of travel creates consistent steering without undue wear and heat being generated in either of the tires. -
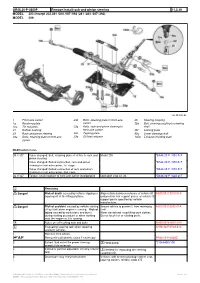
Remove/Install Rack-And-Pinion Steering 11.3.10 MODEL 203 (Except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209
AR46.20-P-0600P Remove/install rack-and-pinion steering 11.3.10 MODEL 203 (except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209 P46.20-2123-09 1 Front axle carrier 23b Bolts, retaining plate to front axle 25 Steering coupling 1g Retaining plate carrier 25a Bolt, steering coupling to steering 10a Tie rod joints 23g Bolts, rack-and-pinion steering to shaft 21 Rubber bushing front axle carrier 25f Locking plate 23 Rack-and-pinion steering 23n Tapping plate 80a Lower steering shaft 23a Bolts, retaining plate to front axle 23q Oil lines retainer 105d Exhaust shielding plate carrier Modification notes 29.11.07 Value changed: Bolt, retaining plate of oil line to rack-and- Model 203 *BA46.20-P-1001-01F pinion steering Value changed: Bolted connection, rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 1st stage Value changed: Bolted connection of rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 2nd stage 30.11.07 Torque, retaining plate to front axle carrier incorporated Operation step 23, 24 *BA46.20-P-1004-01F Removing Danger! Risk of death caused by vehicle slipping or Align vehicle between columns of vehicle lift AS00.00-Z-0010-01A toppling off of the lifting platform. and position four support plates at vehicle lift support points specified by vehicle manufacturer. Danger! Risk of accident caused by vehicle starting Secure vehicle to prevent it from moving by AS00.00-Z-0005-01A off by itself when engine is running. Risk of itself. -

POWER and MANUAL RACK and PINION STEERING Tabla De Diagnostico De Problemas Blies by Removing the Sans Barres D’Accouplement Ni Original a La De Reemplazo
930724-22(R&P) 11/20/03 12:46 PM Page 1 Troubleshooting Chart Tableau de Dépannage - 2. Remove the tie rod assem- Ce type de direction est fourni de las mismas de la unidad 7. Secure the inner tie rod ATTENTION: Ne forcez pas sujetar la cremallera. ’é POWER AND MANUAL RACK AND PINION STEERING Tabla de Diagnostico de Problemas blies by removing the sans barres d’accouplement ni original a la de reemplazo. Se housings. For GM and sur le joint de la crémaillère ni 5. Instale las barras de Step-By-Step Instructions inner tie rod housing. embouts intérieurs ou suministra un juego que con- Chrysler units, stake the sur le pignon. Utilisez toujours acoplamiento en la unidad de DIRECTION À CRÉMAILLÈRE ASSISTÉE OU MANUELLE NOTE: Ford units require extérieurs. Vous devez trans- tiene las partes necesarias housing. For Ford units, une pince pour maintenir la reemplazo, teniendo cuidado de Notice d’installation détaillée férer les barres d’accouple- para garantizar una insta- install the lock pins sup- crémaillère. drilling out a pin or removing instalar la barra de servoir. DIRECCIÓN DE PI—”N Y CREMALLERA MANUAL Y SERVOASISTIDA é ment et les embouts de la laciÛn correcta. plied in the installation kit. rifiez/corrigez la Instrucciones de instalación por pasos a roll pin before the inner tie 5. Installez les barres d’ac- acoplamiento derecha en el é direction d’origine sur la nou- sito. rod can be detached. 1. DespuÈs de quitar la unidad 8. Install the shock dampen- couplement sur la nouvelle lado derecho y la izquierda en ricos (o-rings) o Û velle. -

Oscillatory Motion Leadscrews • for Applications Requiring Linear Oscillatory Motion Over a Fixed Path
© 1994 by Alexander H. Slocum Precision Machine Design Topic 21 Linear motion actuators Purpose: This lecture provides an introduction to the design issues associated with linear power transmission elements. Major topics: • Error sources • Belt drives • Rack and pinion drives •Friction drives • Leadscrews • Linear electric motors "...screw your courage to the sticking-place, And we'll not fail" Shakespeare 21-1 © 1994 by Alexander H. Slocum Error sources: • There are five principal error sources that affect linear actuator' performance: • Form error in the device components. • Component misalignment. • Backlash. • Friction. • Thermal effects • These systems often have long shafts (e.g., ballscrews). • One must be careful of bending frequencies being excited by rotating motors. 21-2 © 1994 by Alexander H. Slocum Belt drives • Used in printers, semiconductor automated material handling systems, robots, etc. • Timing belts will not slip. • Metal belts have greater stiffness, but stress limits life: σ = Et 2ρ • Timing belts will be the actuator of choice for low cost, low stiffness, low force linear motion until: •Linear electric motor cost comes down. • PC based control boards with self-tuning modular algorithms become more prevalent. • To prevent the belts' edges wearing on pulley flanges: • Use side rollers to guide timing belt to prevent wear caused by flanged sheaves: load Guide roller Belt 21-3 © 1994 by Alexander H. Slocum Rack and pinion drives Motor Pinion Rack • One of the least expensive methods of generating linear motion from rotary motion. • Racks can be placed end to end for as great a distance as one can provide a secure base on which to bolt them. -

Slew Driveproduct Catalog Strong Partnershipstrong Partnership IMO Tobeafast, Flexibleandreliable Slewing Equity
ST 205 US www.goimo.com Slew DriveProduct Catalog Strong Partnership Strong The strong partnership IMO has with Brück GmbH in Saarbrücken for seamless rolled rings and Brück AM in Zamrsk, Czech Rep., for CNC pre-machining, enables IMO to present a line of high performance, high quality Slewing Rings and Slew Drives. Strong Partnership Strong Brück is running five rolling mills with a monthly capacity up to 3,500 tons (7,700,000 lbs)! A strong partnership is created by Brück owners holding a 50 percent stake in IMO’s equity. For you as our customer, this enables IMO to be a fast, flexible and reliable Slewing Ring and Slew Drive manufacturer. Preface & Imprint The innovative business group IMO, with headquarters in Gremsdorf, Germany, has been designing, manufacturing and supplying IMO has developed, manufactured and sold All the information in this catalog has been carefully Slewing Rings and self-contained Slew Drives innovative Slew Drives to global customers for many evaluated and checked. We cannot accept for more than 16 years. IMO currently holds years. responsibility for omissions and errors in this EN ISO 9001:2000 approval and has been publication. certified since 1995. Our range of products is presented in this catalog. IMO, with its modern manufacturing facilities, Our wide range of standard size Slew Drives is manufactures and delivers over 10,000 Ball unique on the market. Published by and Roller Slewing Rings and Slew Drives each IMO Antriebseinheit GmbH year, in diameters up to 204 in. IMO is a globally Special designs are also available, please contact Gewerbepark 16 our Engineering Department for assistance (the 91350 Gremsdorf recognized supplier of Slewing Rings and contact details are on the back of the catalog). -

Electronic Power Steering Rack and Pinion
Remanufactured ELECTRONIC POWER STEERING RACK AND PINION Expertly remanufactured to rigorous quality and performance standards, Product Description CARDONE® Electronic Power Steering Rack and Pinions are equipped with brand-new, premium components to guarantee exceptional longevity and Features and Benefits reliability. Each unit undergoes CARDONE’s Factory Test Drive, simulating Signs of Wear and extreme operating conditions while verifying all on-car communications. Troubleshooting All rubber sealing components are replaced, and a specialized lubricant is applied to drastically increase longevity. FAQs • 100% replacement of rubber sealing components • Application of specialized lubricant(s) for extended life • Finished in protective coating to prevent corrosion and rust • All rack & pinion/gearbox units meet or exceed O.E. form, fit and function. Signs of Wear and Troubleshooting • Knocking or clunking • Vibrations • Power Steering Assist System failure warning on Driver Information Center. • A catch or bind going into or coming out of a turn in either direction. • Intermittent high pitched screeching noise similar to the sound of a motor being actuated. Subscribe to receive email notification whenever cardone.com we introduce new products or technical videos. Tech Service: 888-280-8324 Click Steering Tech Help for technical tips, articles and installation videos. Rev Date:Rev 063015 Date: 021518 • Vehicle has a tendency to wander requiring the driver to make frequent and random and steering wheel corrections to either direction. Product Description • Shimmy; driver observes small or large, consistent, rotational oscillations Features and Benefits of the steering wheel caused by various road surfaces or side-to-side Signs of Wear and (lateral) tire/wheel movements. Troubleshooting • Poor return ability or sticky steering; the poor return of the steering FAQs wheel to center after a turn. -

The Modern Collectible
SKINNED KNUCKLES LARES ARTICLE CORPORATION The Modern Collectible by Orest Lazarowich A DETAILED TECHNICAL COLUMN INTENDED TO TARGET MANY MAKES AND MODELS OF POST-WAR CARS AND PICK-UP TRUCKS the steering wheel is not being turned, power Rack and Pinion steering fluid is directed around the rotary valve and out to the reservoir. The pressure is equal on Power Steering both sides of the piston. As the steering wheel is The rack and pinion power steering differs turned, the torsion bar twists and rotates the rotary slightly from the manual rack and pinion steering. valve. The valve blocks the port to the reservoir, Part of the rack contains a cylinder with a piston and fluid now flows through an opening to one in the middle. The piston is connected to the rack. side of the steering gear. At the same time the There are two fluid ports, one on either side of the other side of the cylinder is vented to the reser- piston. A torsion bar directs the rotary valve voir. With fluid pressure to one side of the piston which is connected to the steering wheel. When and none to the other, the piston moves which in RETURN LINE PUMP RESERVOIR Magazine. STEERING COLUMN ROTARY VALVE PRESSURE LINE TO ROTARY VALVE Skinned Knuckles Skinned FLUID LINES FROM ROTARY VALVE RACK HYDRAULIC PISTON PINION JULY 2014 - PAGE 11 Article content provided by Lares Corporation Steering Components • CALL 1.800.555.0767 • VISIT www.LaresCorp.com SKINNED KNUCKLES LARES ARTICLE CORPORATION turn moves the rack and causes the wheels to turn. -
Wipro Drive-By-Wire Solutions
Wipro Drive-By-Wire Solutions Accelerating Your Autonomous Vehicles Development Journey Wipro’s drive-by-wire system implementation extends from navigation controls to robotics controls, thus making it a comprehensive solution. Introduction Wipro’s drive-by-wire solutions enable electronic control of braking, throttle, steering, and shifting in vehicles. We understand that the intricacies of drive-by-wire solutions differ between prototype and production-grade vehicles. We implement customized and apt drive-by-wire solutions together with our trusted technology partners for any vehicle type. The system implementation extends from navigation controls to robotics controls, thus making it a comprehensive solution. Compliance to safety regulations is ensured in all implementations. Key Takeaways Prototype and one-off vehicles A less invasive approach of installing fully electrically operated servo actuators for functions Production vehicles Replacing existing systems such as power-assisted rack and pinion assembly with EPS and EPAS for steer-by-wire systems Supplementary / Auxiliary control options Direct electronic actuation with solenoid and servo proportional valves for material handling equipment such as hydraulically operated forklifts and cranes All our drive-by-wire designs meet regulatory requirements like ISO26262, ASIL-D, FMVSS and AUTOSAR Key benefits and features of Wipro drive-by-wire systems To provide the appropriate solution to the vehicle type, we place the use case-specific sensors, electronic controllers and central computing platform on top of drive-by-wire enabled system and this is integrated with Wipro’s autonomous navigation AI algorithm software stack. The autonomous navigation stack together with our range of robotic arm movement capabilities, make the end-to-end solution appropriate for any moving machine. -
Design and Analysis of a Mechanical Driveline with Generator for an Atmospheric Energy Harvester Sneha Ganesh Clemson University
Clemson University TigerPrints All Theses Theses 12-2017 Design and Analysis of a Mechanical Driveline with Generator for an Atmospheric Energy Harvester Sneha Ganesh Clemson University Follow this and additional works at: https://tigerprints.clemson.edu/all_theses Recommended Citation Ganesh, Sneha, "Design and Analysis of a Mechanical Driveline with Generator for an Atmospheric Energy Harvester" (2017). All Theses. 2794. https://tigerprints.clemson.edu/all_theses/2794 This Thesis is brought to you for free and open access by the Theses at TigerPrints. It has been accepted for inclusion in All Theses by an authorized administrator of TigerPrints. For more information, please contact [email protected]. DESIGN AND ANALYSIS OF A MECHANICAL DRIVELINE WITH GENERATOR FOR AN ATMOSPHERIC ENERGY HARVESTER A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science Mechanical Engineering by Sneha Ganesh December 2017 Accepted by: Dr. John Wagner, Committee Chair Dr. Yue (Sophie) Wang Dr. Todd Schweisinger ABSTRACT The advent of renewable energy as a primary power source for microelectronic devices has motivated research within the energy harvesting community over the past decade. Compact, self-contained, portable energy harvesters can be applied to wireless sensor networks, Internet of Things (IoT) smart appliances, and a multitude of standalone equipment; replacing batteries and improving the operational life of such systems. Atmospheric changes influenced by cyclical temporal variations offer an abundance of harvestable thermal energy. However, the low conversion efficiency of a common thermoelectric device does not tend to be practical for microcircuit operations. One solution may lie in a novel electromechanical power transformer integrated with a thermodynamic based phase change material to create a temperature/pressure energy harvester. -

Design of Rack and Pinion Steering for All Terrain Vehicle
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 06 Issue: 02 | Feb 2019 www.irjet.net p-ISSN: 2395-0072 DESIGN OF RACK AND PINION STEERING FOR ALL TERRAIN VEHICLE Ajay M. Tayde1, Sanket P. Golhar2, Shital R. Ughade3, Nikita Ramdas Kakde4 1,2,3,4Student, Department of Mechanical Engineering, PRMIT&R, Badnera, Amravati University, Maharashtra (INDIA) ---------------------------------------------------------------------***---------------------------------------------------------------------- Abstract: Aim is to design a Rack and Pinion Gearbox Above fig. shows the Rack and pinion steering is a simple (RPG) which has desired steering ratio, zero play in the system that directly converts the rotation of the steering Rack and pinion gear box and sensitive steering. Rack and wheel to straight line movement at the wheels. The pinion steering systems are commonly used due to their steering gear consists of the rack, pinion, and related simplicity in construction and compactness. Main purpose housings and support bearings. Turning the steering of this paper is to design the rack and pinion steering wheel causes the pinion to rotate. system. In this paper analyzed the two components of the steering system. In order to calculate the stresses, safety 1.1 Requirements of steering system factor, no of teeth on rack and pinion. Improve the performance of steering system. 1) Provide the proper turning to vehicle on sharp edges of track. Key words: Rack and pinion, teeth, addendum, 2) Require minimum effort to turn the vehicle. Dedendum, pitch circle 3) Design in such a way that minimum shock will be acts on driver. 1. Introduction 4) Loss of steering wheel control should not occur. -

Baja SAE Ecvt Mechanical Design Cal Poly Racing August 2019
Final Design Report Baja SAE eCVT Mechanical Design Cal Poly Racing August 2019 Will Antes [email protected] Matthew Balboni [email protected] Benjamin Colard [email protected] Tyler Connel [email protected] Julian Finburgh [email protected] Statement of Disclaimer Since this project is a result of a class assignment, it has been graded and accepted as fulfillment of the course requirements. Acceptance does not imply technical accuracy or reliability. Any use of information in this report is done at the risk of the user. These risks may include catastrophic failure of the device or infringement of patent or copyright laws. California Polytechnic State University at San Luis Obispo and its staff cannot be held liable for any use or misuse of the project. 2 Table of Contents Statement of Disclaimer 2 Table of Contents 3 Table of Figures 6 Table of Tables 8 1. Introduction 9 2. Background 9 2.1 Competition 12 2.2 Regulations 14 3. Objectives 16 3.1 Problem Statement 16 3.2 Customer Specifications 16 3.3 Boundary Diagram 17 3.4 Quality Function Deployment 17 3.5 Engineering Specifications 18 3.5.1 Measurement of Each Specification 20 3.5.2 High Risk Specifications 21 4. Concept Design Development 21 4.1 Single versus Dual Actuation Plan 21 4.2 Failure Mode Analysis 22 4.3 Force Analysis 23 4.4 Actuation Concepts 24 4.4.1 Rigid Arm Actuation Method 24 4.4.2 Pivoting Arm Actuation Method 25 4.4.3 Planetary Gear Set Actuation Method 26 4.4.4 Lead Screw Actuation Method 28 4.5 Selection Process 28 5. -
1700 Animated Linkages
Nguyen Duc Thang 1700 ANIMATED MECHANICAL MECHANISMS With Images, Brief explanations and Youtube links. Part 1 Transmission of continuous rotation Renewed on 31 December 2014 1 This document is divided into 3 parts. Part 1: Transmission of continuous rotation Part 2: Other kinds of motion transmission Part 3: Mechanisms of specific purposes Autodesk Inventor is used to create all videos in this document. They are available on Youtube channel “thang010146”. To bring as many as possible existing mechanical mechanisms into this document is author’s desire. However it is obstructed by author’s ability and Inventor’s capacity. Therefore from this document may be absent such mechanisms that are of complicated structure or include flexible and fluid links. This document is periodically renewed because the video building is continuous as long as possible. The renewed time is shown on the first page. This document may be helpful for people, who - have to deal with mechanical mechanisms everyday - see mechanical mechanisms as a hobby Any criticism or suggestion is highly appreciated with the author’s hope to make this document more useful. Author’s information: Name: Nguyen Duc Thang Birth year: 1946 Birth place: Hue city, Vietnam Residence place: Hanoi, Vietnam Education: - Mechanical engineer, 1969, Hanoi University of Technology, Vietnam - Doctor of Engineering, 1984, Kosice University of Technology, Slovakia Job history: - Designer of small mechanical engineering enterprises in Hanoi. - Retirement in 2002. Contact Email: [email protected] 2 Table of Contents 1. Continuous rotation transmission .................................................................................4 1.1. Couplings ....................................................................................................................4 1.2. Clutches ....................................................................................................................13 1.2.1. Two way clutches...............................................................................................13 1.2.1.