Computational Topology for Point Data: Betti Numbers of Α-Shapes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Betti Numbers of Finite Volume Orbifolds 10
BETTI NUMBERS OF FINITE VOLUME ORBIFOLDS IDDO SAMET Abstract. We prove that the Betti numbers of a negatively curved orbifold are linearly bounded by its volume, generalizing a theorem of Gromov which establishes this bound for manifolds. An imme- diate corollary is that Betti numbers of a lattice in a rank-one Lie group are linearly bounded by its co-volume. 1. Introduction Let X be a Hadamard manifold, i.e. a connected, simply-connected, complete Riemannian manifold of non-positive curvature normalized such that −1 ≤ K ≤ 0. Let Γ be a discrete subgroup of Isom(X). If Γ is torsion-free then X=Γ is a Riemannian manifold. If Γ has torsion elements, then X=Γ has a structure of an orbifold. In both cases, the Riemannian structure defines the volume of X=Γ. An important special case is that of symmetric spaces X = KnG, where G is a connected semisimple Lie group without center and with no compact factors, and K is a maximal compact subgroup. Then X is non-positively curved, and G is the connected component of Isom(X). In this case, X=Γ has finite volume iff Γ is a lattice in G. The curvature of X is non-positive if rank(G) ≥ 2, and is negative if rank(G) = 1. In many cases, the volume of negatively curved manifold controls the complexity of its topology. A manifestation of this phenomenon is the celebrated theorem of Gromov [3, 10] stating that if X has sectional curvature −1 ≤ K < 0 then Xn (1) bi(X=Γ) ≤ Cn · vol(X=Γ); i=0 where bi are Betti numbers w.r.t. -

Cusp and B1 Growth for Ball Quotients and Maps Onto Z with Finitely
Cusp and b1 growth for ball quotients and maps onto Z with finitely generated kernel Matthew Stover∗ Temple University [email protected] August 8, 2018 Abstract 2 Let M = B =Γ be a smooth ball quotient of finite volume with first betti number b1(M) and let E(M) ≥ 0 be the number of cusps (i.e., topological ends) of M. We study the growth rates that are possible in towers of finite-sheeted coverings of M. In particular, b1 and E have little to do with one another, in contrast with the well-understood cases of hyperbolic 2- and 3-manifolds. We also discuss growth of b1 for congruence 2 3 arithmetic lattices acting on B and B . Along the way, we provide an explicit example of a lattice in PU(2; 1) admitting a homomorphism onto Z with finitely generated kernel. Moreover, we show that any cocompact arithmetic lattice Γ ⊂ PU(n; 1) of simplest type contains a finite index subgroup with this property. 1 Introduction Let Bn be the unit ball in Cn with its Bergman metric and Γ be a torsion-free group of isometries acting discretely with finite covolume. Then M = Bn=Γ is a manifold with a finite number E(M) ≥ 0 of cusps. Let b1(M) = dim H1(M; Q) be the first betti number of M. One purpose of this paper is to describe possible behavior of E and b1 in towers of finite-sheeted coverings. Our examples are closely related to the ball quotients constructed by Hirzebruch [25] and Deligne{ Mostow [17, 38]. -

On the Betti Numbers of Real Varieties
ON THE BETTI NUMBERS OF REAL VARIETIES J. MILNOR The object of this note will be to give an upper bound for the sum of the Betti numbers of a real affine algebraic variety. (Added in proof. Similar results have been obtained by R. Thom [lO].) Let F be a variety in the real Cartesian space Rm, defined by poly- nomial equations /i(xi, ■ ■ ■ , xm) = 0, ■ • • , fP(xx, ■ ■ ■ , xm) = 0. The qth Betti number of V will mean the rank of the Cech cohomology group Hq(V), using coefficients in some fixed field F. Theorem 2. If each polynomial f, has degree S k, then the sum of the Betti numbers of V is ^k(2k —l)m-1. Analogous statements for complex and/or projective varieties will be given at the end. I wish to thank W. May for suggesting this problem to me. Remark A. This is certainly not a best possible estimate. (Compare Remark B.) In the examples which I know, the sum of the Betti numbers of V is always 5=km. Consider for example the m polynomials fi(xx, ■ ■ ■ , xm) = (xi - l)(xi - 2) • • • (xi - k), where i=l, 2, • ■ • , m. These define a zero-dimensional variety, con- sisting of precisely km points. The proofs of Theorem 2 and of Theorem 1 (which will be stated later) depend on the following. Lemma 1. Let V~oERm be a zero-dimensional variety defined by poly- nomial equations fx = 0, ■ • • , fm = 0. Suppose that the gradient vectors dfx, • • • , dfm are linearly independent at each point of Vo- Then the number of points in V0 is at most equal to the product (deg fi) (deg f2) ■ ■ ■ (deg/m). -
Topological Data Analysis of Biological Aggregation Models
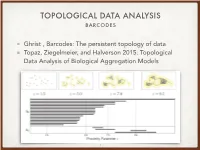
TOPOLOGICAL DATA ANALYSIS BARCODES Ghrist , Barcodes: The persistent topology of data Topaz, Ziegelmeier, and Halverson 2015: Topological Data Analysis of Biological Aggregation Models 1 Questions in data analysis: • How to infer high dimensional structure from low dimensional representations? • How to assemble discrete points into global structures? 2 Themes in topological data analysis1 : 1. Replace a set of data points with a family of simplicial complexes, indexed by a proximity parameter. 2. View these topological complexes using the novel theory of persistent homology. 3. Encode the persistent homology of a data set as a parameterized version of a Betti number (a barcode). 1Work of Carlsson, de Silva, Edelsbrunner, Harer, Zomorodian 3 CLOUDS OF DATA Point cloud data coming from physical objects in 3-d 4 CLOUDS TO COMPLEXES Cech Rips complex complex 5 CHOICE OF PARAMETER ✏ ? USE PERSISTENT HOMOLOGY APPLICATION (TOPAZ ET AL.): BIOLOGICAL AGGREGATION MODELS Use two math models of biological aggregation (bird flocks, fish schools, etc.): Vicsek et al., D’Orsogna et al. Generate point clouds in position-velocity space at different times. Analyze the topological structure of these point clouds by calculating the first few Betti numbers. Visualize of Betti numbers using contours plots. Compare results to other measures/parameters used to quantify global behavior of aggregations. TDA AND PERSISTENT HOMOLOGY FORMING A SIMPLICIAL COMPLEX k-simplices • 1-simplex (edge): 2 points are within ✏ of each other. • 2-simplex (triangle): 3 points are pairwise within ✏ from each other EXAMPLE OF A VIETORIS-RIPS COMPLEX HOMOLOGY BOUNDARIES For k 0, create an abstract vector space C with basis consisting of the ≥ k set of k-simplices in S✏. -

Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand
Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand To cite this version: Alexandre Dupas, Guillaume Damiand. Topologically Constrained Segmentation with Topological Maps. Workshop on Computational Topology in Image Context, Jun 2008, Poitiers, France. hal- 01517182 HAL Id: hal-01517182 https://hal.archives-ouvertes.fr/hal-01517182 Submitted on 2 May 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Topologically Constrained Segmentation with Topological Maps Alexandre Dupas1 and Guillaume Damiand2 1 XLIM-SIC, Universit´ede Poitiers, UMR CNRS 6172, Bˆatiment SP2MI, F-86962 Futuroscope Chasseneuil, France [email protected] 2 LaBRI, Universit´ede Bordeaux 1, UMR CNRS 5800, F-33405 Talence, France [email protected] Abstract This paper presents incremental algorithms used to compute Betti numbers with topological maps. Their implementation, as topological criterion for an existing bottom-up segmentation, is explained and results on artificial images are shown to illustrate the process. Keywords: Topological map, Topological constraint, Betti numbers, Segmentation. 1 Introduction In the image processing context, image segmentation is one of the main steps. Currently, most segmentation algorithms take into account color and texture of regions. Some of them also in- troduce geometrical criteria, like taking the shape of the object into account, to achieve a good segmentation. -

Betti Number Bounds, Applications and Algorithms
Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 Betti Number Bounds, Applications and Algorithms SAUGATA BASU, RICHARD POLLACK, AND MARIE-FRANC¸OISE ROY Abstract. Topological complexity of semialgebraic sets in Rk has been studied by many researchers over the past fifty years. An important mea- sure of the topological complexity are the Betti numbers. Quantitative bounds on the Betti numbers of a semialgebraic set in terms of various pa- rameters (such as the number and the degrees of the polynomials defining it, the dimension of the set etc.) have proved useful in several applications in theoretical computer science and discrete geometry. The main goal of this survey paper is to provide an up to date account of the known bounds on the Betti numbers of semialgebraic sets in terms of various parameters, sketch briefly some of the applications, and also survey what is known about the complexity of algorithms for computing them. 1. Introduction Let R be a real closed field and S a semialgebraic subset of Rk, defined by a Boolean formula, whose atoms are of the form P = 0, P > 0, P < 0, where P ∈ P for some finite family of polynomials P ⊂ R[X1,...,Xk]. It is well known [Bochnak et al. 1987] that such sets are finitely triangulable. Moreover, if the cardinality of P and the degrees of the polynomials in P are bounded, then the number of topological types possible for S is finite [Bochnak et al. 1987]. (Here, two sets have the same topological type if they are semialgebraically homeomorphic). A natural problem then is to bound the topological complexity of S in terms of the various parameters of the formula defining S. -
Papers on Topology Analysis Situs and Its Five Supplements
Papers on Topology Analysis Situs and Its Five Supplements Henri Poincaré Translated by John Stillwell American Mathematical Society London Mathematical Society Papers on Topology Analysis Situs and Its Five Supplements https://doi.org/10.1090/hmath/037 • SOURCES Volume 37 Papers on Topology Analysis Situs and Its Five Supplements Henri Poincaré Translated by John Stillwell Providence, Rhode Island London, England Editorial Board American Mathematical Society London Mathematical Society Joseph W. Dauben Jeremy J. Gray Peter Duren June Barrow-Green Robin Hartshorne Tony Mann, Chair Karen Parshall, Chair Edmund Robertson 2000 Mathematics Subject Classification. Primary 01–XX, 55–XX, 57–XX. Front cover photograph courtesy of Laboratoire d’Histoire des Sciences et de Philosophie—Archives Henri Poincar´e(CNRS—Nancy-Universit´e), http://poincare.univ-nancy2.fr. For additional information and updates on this book, visit www.ams.org/bookpages/hmath-37 Library of Congress Cataloging-in-Publication Data Poincar´e, Henri, 1854–1912. Papers on topology : analysis situs and its five supplements / Henri Poincar´e ; translated by John Stillwell. p. cm. — (History of mathematics ; v. 37) Includes bibliographical references and index. ISBN 978-0-8218-5234-7 (alk. paper) 1. Algebraic topology. I. Title. QA612 .P65 2010 514.2—22 2010014958 Copying and reprinting. Individual readers of this publication, and nonprofit libraries acting for them, are permitted to make fair use of the material, such as to copy a chapter for use in teaching or research. Permission is granted to quote brief passages from this publication in reviews, provided the customary acknowledgment of the source is given. Republication, systematic copying, or multiple reproduction of any material in this publication is permitted only under license from the American Mathematical Society. -

Symplectic Fixed Points, the Calabi Novikov Homology
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Pergamon TopologyVol. 34, No. I, Pp. 155-176,1995 Copyright0 1QQ4Elsevie? Scicnac Ltd Printedin Gnat Britain.All ri&ts rtscrval 0@4%938395 s9.50 + 0.00 0040-9383(94)EOO15-C SYMPLECTIC FIXED POINTS, THE CALABI INVARIANT AND NOVIKOV HOMOLOGY LB HONG VAN and KAORU ONO? (~~ee~u~d 31 March 1993) 1. INTRODUCTION A SYMPLECTIC structure o on a manifold M provides a one-to-one correspondence between closed l-forms and infinitesimal automorphisms of (~,~), i.e. vector fields X satisfying _Yxw = 0. An infinitesimal automorphism X is called a Hamiltonian vector field, if it corresponds to an exact l-form, A symplectomorphism rp on M is called exact, if it is the time-one map of a time-dependent Hamiltonian vector field. In fact, one can find a periodic Hamiltonian function such that o, is the time-one map of the Hamiltonian system. For each symplectomorphism cp isotopic to the identity through symplectomo~hisms, one can assign a “cohomology class” Cal(rp), which is called the Calabi invariant of cp. Banyaga [3] showed that rp is exact if and only if Cal(p) = 0. The Arnold conjecture states that the number of fixed points of an exact symplectomorphism on a compact symplectic manifold can be estimated below by the sum of the Betti numbers of M provided that all the fixed points are non-degenerate. Arnol’d came to this conjecture by analysing the case that 9 is close to the identity (see Cl]). -

L2-Betti Numbers in Group Theory, MSRI, 06/2019
Ergodic theoretic methods in group homology A minicourse on L2-Betti numbers in group theory Clara L¨oh MSRI Summer graduate school (06/2019) Random and arithmetic structures in topology Version of July 23, 2019 [email protected] Fakult¨atf¨urMathematik, Universit¨atRegensburg, 93040 Regensburg ©Clara L¨oh,2019 Contents 0 Introduction 1 1 The von Neumann dimension 5 1.1 From the group ring to the group von Neumann algebra 6 1.1.1 The group ring 6 1.1.2 Hilbert modules 8 1.1.3 The group von Neumann algebra 9 1.2 The von Neumann dimension 11 1.E Exercises 14 2 L2-Betti numbers 15 2.1 An elementary definition of L2-Betti numbers 16 2.1.1 Finite type 16 2.1.2 L2-Betti numbers of spaces 17 2.1.3 L2-Betti numbers of groups 18 2.2 Basic computations 18 2.2.1 Basic properties 19 2.2.2 First examples 21 2.3 Variations and extensions 22 2.E Exercises 24 3 The residually finite view: Approximation 25 3.1 The approximation theorem 26 3.2 Proof of the approximation theorem 26 3.2.1 Reduction to kernels of self-adjoint operators 27 3.2.2 Reformulation via spectral measures 27 3.2.3 Weak convergence of spectral measures 28 3.2.4 Convergence at 0 29 iv Contents 3.3 Homological gradient invariants 30 3.3.1 Betti number gradients 31 3.3.2 Rank gradient 31 3.3.3 More gradients 32 3.E Exercises 33 4 The dynamical view: Measured group theory 35 4.1 Measured group theory 36 4.1.1 Standard actions 36 4.1.2 Measure/orbit equivalence 37 4.2 L2-Betti numbers of equivalence relations 38 4.2.1 Standard equivalence relations 39 4.2.2 Construction -

BETTI NUMBER ESTIMATES for NILPOTENT GROUPS 1. the Main
BETTI NUMBER ESTIMATES FOR NILPOTENT GROUPS MICHAEL FREEDMAN, RICHARD HAIN, AND PETER TEICHNER Abstract. We prove an extension of the followingresult of Lubotzky and Madid on the rational cohomology of a nilpotent group G:Ifb1 < ∞ 2 2 and G ⊗ Q =0 , Q, Q then b2 >b1/4. Here the bi are the rational Betti numbers of G and G ⊗ Q denotes the Malcev-completion of G. In the extension, the bound is improved when the relations of G are known to all have at least a certain commutator length. As an application we show that every closed oriented 3-manifold falls into exactly one of the followingclasses: It is a rational homology3-sphere, or it is a rational homology S1 × S2, or it has the rational homology of one of the oriented circle bundles over the torus (which are indexed by an Euler number n ∈ Z, e.g. n = 0 corresponds to the 3-torus) or it is of general type by which we mean that the rational lower central series of the fundamental group does not stabilize. In particular, any 3-manifold group which allows a maximal torsion-free nilpotent quotient admits a rational homology isomorphism to a torsion-free nilpotent group. 1. The Main Results We analyze the rational lower central series of 3-manifold groups by an extension of the following theorem of Lubotzky and Magid [15, (3.9)]. Theorem 1. If G is a nilpotent group with b1(G) < ∞ and G ⊗ Q = {0}, Q, Q2, then 1 b (G) > b (G)2 2 4 1 Here bi(G) dentotes the ith rational Betti number of G and G ⊗ Q the Malcev-completion of G. -

Extremal Betti Numbers and Applications to Monomial Ideals
Extremal Betti Numbers and Applications to Monomial Ideals Dave Bayer Hara Charalambous Sorin Popescu ∗ Let S = k[x1,...,xn] be the polynomial ring in n variables over a field k,let M be a graded S-module,and let F• :0−→ Fr −→ ...−→ F1 −→ F0 −→ M −→ 0 be a minimal free resolution of M over S. As usual,we define the associated (graded) Betti numbers βi,j = βi,j(M) by the formula βi,j Fi = ⊕jS(−j) . Recall that the (Mumford-Castelnuovo) regularity of M is the least integer ρ such that for each i all free generators of Fi lie in degree ≤ i + ρ,that is βi,j = 0,for j>i+ ρ. In terms of Macaulay [Mac] regularity is the number of rows in the diagram produced by the “betti” command. A Betti number βi,j = 0 will be called extremal if βl,r = 0 for all l ≥ i, r ≥ j +1 and r − l ≥ j − i,that is if βi,j is the nonzero top left “corner” in a block of zeroes in the Macaulay “betti” diagram. In other words,extremal Betti numbers account for “notches” in the shape of the minimal free resolution and one of them computes the regularity. In this sense,extremal Betti numbers can be seen as a refinement of the notion of Mumford-Castelnuovo regularity. In the first part of this note we connect the extremal Betti numbers of an arbitrary submodule of a free S-module with those of its generic initial module. In the second part,which can be read independently of the first,we relate extremal multigraded Betti numbers in the minimal resolution of a square free monomial ideal with those of the monomial ideal corresponding to the Alexander dual simplicial complex. -

On the Total Curvature and Betti Numbers of Complex Projective Manifolds
University of Pennsylvania ScholarlyCommons Publicly Accessible Penn Dissertations 2018 On The Total Curvature And Betti Numbers Of Complex Projective Manifolds Joseph Ansel Hoisington University of Pennsylvania, [email protected] Follow this and additional works at: https://repository.upenn.edu/edissertations Part of the Mathematics Commons Recommended Citation Hoisington, Joseph Ansel, "On The Total Curvature And Betti Numbers Of Complex Projective Manifolds" (2018). Publicly Accessible Penn Dissertations. 2791. https://repository.upenn.edu/edissertations/2791 This paper is posted at ScholarlyCommons. https://repository.upenn.edu/edissertations/2791 For more information, please contact [email protected]. On The Total Curvature And Betti Numbers Of Complex Projective Manifolds Abstract We prove an inequality between the sum of the Betti numbers of a complex projective manifold and its total curvature, and we characterize the complex projective manifolds whose total curvature is minimal. These results extend the classical theorems of Chern and Lashof to complex projective space. Degree Type Dissertation Degree Name Doctor of Philosophy (PhD) Graduate Group Mathematics First Advisor Christopher B. Croke Keywords Betti Number Estimates, Chern-Lashof Theorems, Complex Projective Manifolds, Total Curvature Subject Categories Mathematics This dissertation is available at ScholarlyCommons: https://repository.upenn.edu/edissertations/2791 ON THE TOTAL CURVATURE AND BETTI NUMBERS OF COMPLEX PROJECTIVE MANIFOLDS Joseph Ansel Hoisington