From Betti Numbers to 2-Betti Numbers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Betti Numbers of Finite Volume Orbifolds 10
BETTI NUMBERS OF FINITE VOLUME ORBIFOLDS IDDO SAMET Abstract. We prove that the Betti numbers of a negatively curved orbifold are linearly bounded by its volume, generalizing a theorem of Gromov which establishes this bound for manifolds. An imme- diate corollary is that Betti numbers of a lattice in a rank-one Lie group are linearly bounded by its co-volume. 1. Introduction Let X be a Hadamard manifold, i.e. a connected, simply-connected, complete Riemannian manifold of non-positive curvature normalized such that −1 ≤ K ≤ 0. Let Γ be a discrete subgroup of Isom(X). If Γ is torsion-free then X=Γ is a Riemannian manifold. If Γ has torsion elements, then X=Γ has a structure of an orbifold. In both cases, the Riemannian structure defines the volume of X=Γ. An important special case is that of symmetric spaces X = KnG, where G is a connected semisimple Lie group without center and with no compact factors, and K is a maximal compact subgroup. Then X is non-positively curved, and G is the connected component of Isom(X). In this case, X=Γ has finite volume iff Γ is a lattice in G. The curvature of X is non-positive if rank(G) ≥ 2, and is negative if rank(G) = 1. In many cases, the volume of negatively curved manifold controls the complexity of its topology. A manifestation of this phenomenon is the celebrated theorem of Gromov [3, 10] stating that if X has sectional curvature −1 ≤ K < 0 then Xn (1) bi(X=Γ) ≤ Cn · vol(X=Γ); i=0 where bi are Betti numbers w.r.t. -
![Arxiv:Math/0701389V3 [Math.DG] 11 Apr 2007 Hoesadcnetrsi Hssbet E H Uvyb B by Survey the See Subject](https://docslib.b-cdn.net/cover/8041/arxiv-math-0701389v3-math-dg-11-apr-2007-hoesadcnetrsi-hssbet-e-h-uvyb-b-by-survey-the-see-subject-68041.webp)
Arxiv:Math/0701389V3 [Math.DG] 11 Apr 2007 Hoesadcnetrsi Hssbet E H Uvyb B by Survey the See Subject
EXAMPLES OF RIEMANNIAN MANIFOLDS WITH NON-NEGATIVE SECTIONAL CURVATURE WOLFGANG ZILLER Manifolds with non-negative sectional curvature have been of interest since the beginning of global Riemannian geometry, as illustrated by the theorems of Bonnet-Myers, Synge, and the sphere theorem. Some of the oldest conjectures in global Riemannian geometry, as for example the Hopf conjecture on S2 S2, also fit into this subject. For non-negatively curved manifolds, there× are a number of obstruction theorems known, see Section 1 below and the survey by Burkhard Wilking in this volume. It is somewhat surprising that the only further obstructions to positive curvature are given by the classical Bonnet-Myers and Synge theorems on the fundamental group. Although there are many examples with non-negative curvature, they all come from two basic constructions, apart from taking products. One is taking an isometric quotient of a compact Lie group equipped with a biinvariant metric and another a gluing procedure due to Cheeger and recently significantly generalized by Grove-Ziller. The latter examples include a rich class of manifolds, and give rise to non-negative curvature on many exotic 7-spheres. On the other hand, known manifolds with positive sectional curvature are very rare, and are all given by quotients of compact Lie groups, and, apart from the classical rank one symmetric spaces, only exist in dimension below 25. Due to this lack of knowledge, it is therefore of importance to discuss and understand known examples and find new ones. In this survey we will concentrate on the description of known examples, although the last section also contains suggestions where to look for new ones. -

Of the American Mathematical Society August 2017 Volume 64, Number 7
ISSN 0002-9920 (print) ISSN 1088-9477 (online) of the American Mathematical Society August 2017 Volume 64, Number 7 The Mathematics of Gravitational Waves: A Two-Part Feature page 684 The Travel Ban: Affected Mathematicians Tell Their Stories page 678 The Global Math Project: Uplifting Mathematics for All page 712 2015–2016 Doctoral Degrees Conferred page 727 Gravitational waves are produced by black holes spiraling inward (see page 674). American Mathematical Society LEARNING ® MEDIA MATHSCINET ONLINE RESOURCES MATHEMATICS WASHINGTON, DC CONFERENCES MATHEMATICAL INCLUSION REVIEWS STUDENTS MENTORING PROFESSION GRAD PUBLISHING STUDENTS OUTREACH TOOLS EMPLOYMENT MATH VISUALIZATIONS EXCLUSION TEACHING CAREERS MATH STEM ART REVIEWS MEETINGS FUNDING WORKSHOPS BOOKS EDUCATION MATH ADVOCACY NETWORKING DIVERSITY blogs.ams.org Notices of the American Mathematical Society August 2017 FEATURED 684684 718 26 678 Gravitational Waves The Graduate Student The Travel Ban: Affected Introduction Section Mathematicians Tell Their by Christina Sormani Karen E. Smith Interview Stories How the Green Light was Given for by Laure Flapan Gravitational Wave Research by Alexander Diaz-Lopez, Allyn by C. Denson Hill and Paweł Nurowski WHAT IS...a CR Submanifold? Jackson, and Stephen Kennedy by Phillip S. Harrington and Andrew Gravitational Waves and Their Raich Mathematics by Lydia Bieri, David Garfinkle, and Nicolás Yunes This season of the Perseid meteor shower August 12 and the third sighting in June make our cover feature on the discovery of gravitational waves -

Cusp and B1 Growth for Ball Quotients and Maps Onto Z with Finitely
Cusp and b1 growth for ball quotients and maps onto Z with finitely generated kernel Matthew Stover∗ Temple University [email protected] August 8, 2018 Abstract 2 Let M = B =Γ be a smooth ball quotient of finite volume with first betti number b1(M) and let E(M) ≥ 0 be the number of cusps (i.e., topological ends) of M. We study the growth rates that are possible in towers of finite-sheeted coverings of M. In particular, b1 and E have little to do with one another, in contrast with the well-understood cases of hyperbolic 2- and 3-manifolds. We also discuss growth of b1 for congruence 2 3 arithmetic lattices acting on B and B . Along the way, we provide an explicit example of a lattice in PU(2; 1) admitting a homomorphism onto Z with finitely generated kernel. Moreover, we show that any cocompact arithmetic lattice Γ ⊂ PU(n; 1) of simplest type contains a finite index subgroup with this property. 1 Introduction Let Bn be the unit ball in Cn with its Bergman metric and Γ be a torsion-free group of isometries acting discretely with finite covolume. Then M = Bn=Γ is a manifold with a finite number E(M) ≥ 0 of cusps. Let b1(M) = dim H1(M; Q) be the first betti number of M. One purpose of this paper is to describe possible behavior of E and b1 in towers of finite-sheeted coverings. Our examples are closely related to the ball quotients constructed by Hirzebruch [25] and Deligne{ Mostow [17, 38]. -

On the Betti Numbers of Real Varieties
ON THE BETTI NUMBERS OF REAL VARIETIES J. MILNOR The object of this note will be to give an upper bound for the sum of the Betti numbers of a real affine algebraic variety. (Added in proof. Similar results have been obtained by R. Thom [lO].) Let F be a variety in the real Cartesian space Rm, defined by poly- nomial equations /i(xi, ■ ■ ■ , xm) = 0, ■ • • , fP(xx, ■ ■ ■ , xm) = 0. The qth Betti number of V will mean the rank of the Cech cohomology group Hq(V), using coefficients in some fixed field F. Theorem 2. If each polynomial f, has degree S k, then the sum of the Betti numbers of V is ^k(2k —l)m-1. Analogous statements for complex and/or projective varieties will be given at the end. I wish to thank W. May for suggesting this problem to me. Remark A. This is certainly not a best possible estimate. (Compare Remark B.) In the examples which I know, the sum of the Betti numbers of V is always 5=km. Consider for example the m polynomials fi(xx, ■ ■ ■ , xm) = (xi - l)(xi - 2) • • • (xi - k), where i=l, 2, • ■ • , m. These define a zero-dimensional variety, con- sisting of precisely km points. The proofs of Theorem 2 and of Theorem 1 (which will be stated later) depend on the following. Lemma 1. Let V~oERm be a zero-dimensional variety defined by poly- nomial equations fx = 0, ■ • • , fm = 0. Suppose that the gradient vectors dfx, • • • , dfm are linearly independent at each point of Vo- Then the number of points in V0 is at most equal to the product (deg fi) (deg f2) ■ ■ ■ (deg/m). -

A Gauss-Bonnet Theorem for Manifolds with Asymptotically Conical Ends and Manifolds with Conical Singularities
A Gauss-Bonnet Theorem for Asymptotically Conical Manifolds and Manifolds with Conical Singularities. Thèse N° 9275 Présentée le 25 janvier 2019 à la Faculté des sciences de base Groupe Troyanov Programme doctoral en mathématiques pour l’obtention du grade de Docteur ès Sciences par ADRIEN GIULIANO MARCONE Acceptée sur proposition du jury Prof. K. Hess Bellwald, présidente du jury Prof. M. Troyanov, directeur de thèse Prof. A. Bernig, rapporteur Dr I. Izmestiev, rapporteur Prof. J. Krieger, rapporteur 2019 Remerciements En tout premier lieu je souhaite remercier mon directeur de thèse le professeur Marc Troyanov. Ses conseils avisés tout au long de ces quatre années ainsi que son soutien, tant moral que mathématique, ont été indispensables à la réalisation de ce travail. Cependant, réduire ce qu’il m’a appris au seul domaine scientifique serait inexact et je suis fier de dire qu’il est devenu pour moi aujourd’hui un ami. Secondly I want to express all my gratitude to the members of my committee: 1) the director: Professor K. Hess Bellwald, whom I know since the first day of my studies and who has always been a source of inspiration; 2) the internal expert: Professor J. Krieger, whose courses were among the best I took at EPFL; 3) the external experts: Professor A. Bernig (Goethe-Universität Frankfurt), who accepted to be part of this jury despite a truly busy schedule, and Dr I. Iz- mestiev (Université de Fribourg) who kindly invited me to the Oberseminar in Fribourg; for accepting to review my thesis. Merci au Professeur Dalang qui a eu la générosité de financer la fin de mon doc- torat. -
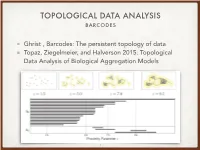
Topological Data Analysis of Biological Aggregation Models
TOPOLOGICAL DATA ANALYSIS BARCODES Ghrist , Barcodes: The persistent topology of data Topaz, Ziegelmeier, and Halverson 2015: Topological Data Analysis of Biological Aggregation Models 1 Questions in data analysis: • How to infer high dimensional structure from low dimensional representations? • How to assemble discrete points into global structures? 2 Themes in topological data analysis1 : 1. Replace a set of data points with a family of simplicial complexes, indexed by a proximity parameter. 2. View these topological complexes using the novel theory of persistent homology. 3. Encode the persistent homology of a data set as a parameterized version of a Betti number (a barcode). 1Work of Carlsson, de Silva, Edelsbrunner, Harer, Zomorodian 3 CLOUDS OF DATA Point cloud data coming from physical objects in 3-d 4 CLOUDS TO COMPLEXES Cech Rips complex complex 5 CHOICE OF PARAMETER ✏ ? USE PERSISTENT HOMOLOGY APPLICATION (TOPAZ ET AL.): BIOLOGICAL AGGREGATION MODELS Use two math models of biological aggregation (bird flocks, fish schools, etc.): Vicsek et al., D’Orsogna et al. Generate point clouds in position-velocity space at different times. Analyze the topological structure of these point clouds by calculating the first few Betti numbers. Visualize of Betti numbers using contours plots. Compare results to other measures/parameters used to quantify global behavior of aggregations. TDA AND PERSISTENT HOMOLOGY FORMING A SIMPLICIAL COMPLEX k-simplices • 1-simplex (edge): 2 points are within ✏ of each other. • 2-simplex (triangle): 3 points are pairwise within ✏ from each other EXAMPLE OF A VIETORIS-RIPS COMPLEX HOMOLOGY BOUNDARIES For k 0, create an abstract vector space C with basis consisting of the ≥ k set of k-simplices in S✏. -

Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand
Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand To cite this version: Alexandre Dupas, Guillaume Damiand. Topologically Constrained Segmentation with Topological Maps. Workshop on Computational Topology in Image Context, Jun 2008, Poitiers, France. hal- 01517182 HAL Id: hal-01517182 https://hal.archives-ouvertes.fr/hal-01517182 Submitted on 2 May 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Topologically Constrained Segmentation with Topological Maps Alexandre Dupas1 and Guillaume Damiand2 1 XLIM-SIC, Universit´ede Poitiers, UMR CNRS 6172, Bˆatiment SP2MI, F-86962 Futuroscope Chasseneuil, France [email protected] 2 LaBRI, Universit´ede Bordeaux 1, UMR CNRS 5800, F-33405 Talence, France [email protected] Abstract This paper presents incremental algorithms used to compute Betti numbers with topological maps. Their implementation, as topological criterion for an existing bottom-up segmentation, is explained and results on artificial images are shown to illustrate the process. Keywords: Topological map, Topological constraint, Betti numbers, Segmentation. 1 Introduction In the image processing context, image segmentation is one of the main steps. Currently, most segmentation algorithms take into account color and texture of regions. Some of them also in- troduce geometrical criteria, like taking the shape of the object into account, to achieve a good segmentation. -

On Index Expectation Curvature for Manifolds 11
ON INDEX EXPECTATION CURVATURE FOR MANIFOLDS OLIVER KNILL Abstract. Index expectation curvature K(x) = E[if (x)] on a compact Riemannian 2d- manifold M is an expectation of Poincar´e-Hopfindices if (x) and so satisfies the Gauss-Bonnet R relation M K(x) dV (x) = χ(M). Unlike the Gauss-Bonnet-Chern integrand, these curvatures are in general non-local. We show that for small 2d-manifolds M with boundary embedded in a parallelizable 2d-manifold N of definite sectional curvature sign e, an index expectation K(x) d Q with definite sign e exists. The function K(x) is constructed as a product k Kk(x) of sec- tional index expectation curvature averages E[ik(x)] of a probability space of Morse functions Q f for which if (x) = ik(x), where the ik are independent and so uncorrelated. 1. Introduction 1.1. The Hopf sign conjecture [16, 5, 6] states that a compact Riemannian 2d-manifold M with definite sectional curvature sign e has Euler characteristic χ(M) with sign ed. The problem was stated first explicitly in talks of Hopf given in Switzerland and Germany in 1931 [16]. In the case of non-negative or non-positive curvature, it appeared in [6] and a talk of 1960 [9]. They appear as problems 8) and 10) in Yau's list of problems [25]. As mentioned in [5], earlier work of Hopf already was motivated by these line of questions. The answer is settled positively in the case d = 1 (Gauss-Bonnet) and d = 2 (Milnor), if M is a hypersurface in R2d+1 (Hopf) [15] or in R2d+2 (Weinstein) [23] or in the case of positively sufficiently pinched curvature, because of sphere theorems (Rauch,Klingenberg,Berger) [22, 10] spheres and projective spaces in even dimension have positive Euler characteristic. -

Betti Number Bounds, Applications and Algorithms
Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 Betti Number Bounds, Applications and Algorithms SAUGATA BASU, RICHARD POLLACK, AND MARIE-FRANC¸OISE ROY Abstract. Topological complexity of semialgebraic sets in Rk has been studied by many researchers over the past fifty years. An important mea- sure of the topological complexity are the Betti numbers. Quantitative bounds on the Betti numbers of a semialgebraic set in terms of various pa- rameters (such as the number and the degrees of the polynomials defining it, the dimension of the set etc.) have proved useful in several applications in theoretical computer science and discrete geometry. The main goal of this survey paper is to provide an up to date account of the known bounds on the Betti numbers of semialgebraic sets in terms of various parameters, sketch briefly some of the applications, and also survey what is known about the complexity of algorithms for computing them. 1. Introduction Let R be a real closed field and S a semialgebraic subset of Rk, defined by a Boolean formula, whose atoms are of the form P = 0, P > 0, P < 0, where P ∈ P for some finite family of polynomials P ⊂ R[X1,...,Xk]. It is well known [Bochnak et al. 1987] that such sets are finitely triangulable. Moreover, if the cardinality of P and the degrees of the polynomials in P are bounded, then the number of topological types possible for S is finite [Bochnak et al. 1987]. (Here, two sets have the same topological type if they are semialgebraically homeomorphic). A natural problem then is to bound the topological complexity of S in terms of the various parameters of the formula defining S. -
Papers on Topology Analysis Situs and Its Five Supplements
Papers on Topology Analysis Situs and Its Five Supplements Henri Poincaré Translated by John Stillwell American Mathematical Society London Mathematical Society Papers on Topology Analysis Situs and Its Five Supplements https://doi.org/10.1090/hmath/037 • SOURCES Volume 37 Papers on Topology Analysis Situs and Its Five Supplements Henri Poincaré Translated by John Stillwell Providence, Rhode Island London, England Editorial Board American Mathematical Society London Mathematical Society Joseph W. Dauben Jeremy J. Gray Peter Duren June Barrow-Green Robin Hartshorne Tony Mann, Chair Karen Parshall, Chair Edmund Robertson 2000 Mathematics Subject Classification. Primary 01–XX, 55–XX, 57–XX. Front cover photograph courtesy of Laboratoire d’Histoire des Sciences et de Philosophie—Archives Henri Poincar´e(CNRS—Nancy-Universit´e), http://poincare.univ-nancy2.fr. For additional information and updates on this book, visit www.ams.org/bookpages/hmath-37 Library of Congress Cataloging-in-Publication Data Poincar´e, Henri, 1854–1912. Papers on topology : analysis situs and its five supplements / Henri Poincar´e ; translated by John Stillwell. p. cm. — (History of mathematics ; v. 37) Includes bibliographical references and index. ISBN 978-0-8218-5234-7 (alk. paper) 1. Algebraic topology. I. Title. QA612 .P65 2010 514.2—22 2010014958 Copying and reprinting. Individual readers of this publication, and nonprofit libraries acting for them, are permitted to make fair use of the material, such as to copy a chapter for use in teaching or research. Permission is granted to quote brief passages from this publication in reviews, provided the customary acknowledgment of the source is given. Republication, systematic copying, or multiple reproduction of any material in this publication is permitted only under license from the American Mathematical Society. -

Fundamental Theorems in Mathematics
SOME FUNDAMENTAL THEOREMS IN MATHEMATICS OLIVER KNILL Abstract. An expository hitchhikers guide to some theorems in mathematics. Criteria for the current list of 243 theorems are whether the result can be formulated elegantly, whether it is beautiful or useful and whether it could serve as a guide [6] without leading to panic. The order is not a ranking but ordered along a time-line when things were writ- ten down. Since [556] stated “a mathematical theorem only becomes beautiful if presented as a crown jewel within a context" we try sometimes to give some context. Of course, any such list of theorems is a matter of personal preferences, taste and limitations. The num- ber of theorems is arbitrary, the initial obvious goal was 42 but that number got eventually surpassed as it is hard to stop, once started. As a compensation, there are 42 “tweetable" theorems with included proofs. More comments on the choice of the theorems is included in an epilogue. For literature on general mathematics, see [193, 189, 29, 235, 254, 619, 412, 138], for history [217, 625, 376, 73, 46, 208, 379, 365, 690, 113, 618, 79, 259, 341], for popular, beautiful or elegant things [12, 529, 201, 182, 17, 672, 673, 44, 204, 190, 245, 446, 616, 303, 201, 2, 127, 146, 128, 502, 261, 172]. For comprehensive overviews in large parts of math- ematics, [74, 165, 166, 51, 593] or predictions on developments [47]. For reflections about mathematics in general [145, 455, 45, 306, 439, 99, 561]. Encyclopedic source examples are [188, 705, 670, 102, 192, 152, 221, 191, 111, 635].