Robotic and Human Lunar Missions Past and Future
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

America's First Moon Landing
America’s First Moon Landing (July 21, 1969) Apollo 11, which was launched into his oval mural commemorating America’s Moon landing space from the Kennedy Space Center, embellishes the Brumidi Corridors in the Senate wing of the Florida, began its epic voyage to the Moon on July 16, 1969. On board were Capitol. The mural’s three main elements are: the rocket that Commander Neil A. Armstrong, Lunar propelled the astronauts into orbit; astronauts Neil Armstrong Module Pilot Edwin E. ”Buzz“ Aldrin, Jr., and Buzz Aldrin planting the United States flag on the Moon, and Command Module Pilot Michael with the lunar module Eagle in the background and the space capsule Collins. After 24 hours in lunar orbit, the T command/service module, Columbia, Columbia circling the Moon; and a view of Earth as seen from the Moon. separated from the lunar module, Eagle. Although the Eagle landed on the Moon in the afternoon of July 20, Armstrong and Aldrin began their descent to the lunar surface in the Eagle while Armstrong and Aldrin did not erect the flag until the next morning, which Collins stayed behind to pilot the explains why the scene is dated July 21, 1969. Columbia. The lunar module touched Muralist Allyn Cox painted the work. The son of artists Kenyon down on the Moon at Tranquility Base on July 20, 1969, at 4:17 P.M. EDT.Arm and Louise King Cox, Allyn Cox was born in New York City. He was strong reported, “The Eagle has landed.” educated at the National Academy of Design and the Art Students League At 10:56 P.M., Armstrong stepped in New York, and the American Academy in Rome. -

Selection of the Insight Landing Site M. Golombek1, D. Kipp1, N
Manuscript Click here to download Manuscript InSight Landing Site Paper v9 Rev.docx Click here to view linked References Selection of the InSight Landing Site M. Golombek1, D. Kipp1, N. Warner1,2, I. J. Daubar1, R. Fergason3, R. Kirk3, R. Beyer4, A. Huertas1, S. Piqueux1, N. E. Putzig5, B. A. Campbell6, G. A. Morgan6, C. Charalambous7, W. T. Pike7, K. Gwinner8, F. Calef1, D. Kass1, M. Mischna1, J. Ashley1, C. Bloom1,9, N. Wigton1,10, T. Hare3, C. Schwartz1, H. Gengl1, L. Redmond1,11, M. Trautman1,12, J. Sweeney2, C. Grima11, I. B. Smith5, E. Sklyanskiy1, M. Lisano1, J. Benardino1, S. Smrekar1, P. Lognonné13, W. B. Banerdt1 1Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109 2State University of New York at Geneseo, Department of Geological Sciences, 1 College Circle, Geneseo, NY 14454 3Astrogeology Science Center, U.S. Geological Survey, 2255 N. Gemini Dr., Flagstaff, AZ 86001 4Sagan Center at the SETI Institute and NASA Ames Research Center, Moffett Field, CA 94035 5Southwest Research Institute, Boulder, CO 80302; Now at Planetary Science Institute, Lakewood, CO 80401 6Smithsonian Institution, NASM CEPS, 6th at Independence SW, Washington, DC, 20560 7Department of Electrical and Electronic Engineering, Imperial College, South Kensington Campus, London 8German Aerospace Center (DLR), Institute of Planetary Research, 12489 Berlin, Germany 9Occidental College, Los Angeles, CA; Now at Central Washington University, Ellensburg, WA 98926 10Department of Earth and Planetary Sciences, University of Tennessee, Knoxville, TN 37996 11Institute for Geophysics, University of Texas, Austin, TX 78712 12MS GIS Program, University of Redlands, 1200 E. Colton Ave., Redlands, CA 92373-0999 13Institut Physique du Globe de Paris, Paris Cité, Université Paris Sorbonne, France Diderot Submitted to Space Science Reviews, Special InSight Issue v. -

The Cassini Robot
THE CASSINI–HUYGENS MISSION LESSON The Cassini Robot 5 Students begin by examining their prior 3–4 hrs notions of robots and then consider the characteristics and capabilities of a robot like the Cassini–Huygens spacecraft that would be sent into space to explore another planet. Students compare robotic functions to human body functions. The lesson MEETS NATIONAL SCIENCE EDUCATION prepares students to design, build, diagram, STANDARDS: and explain their own models of robots for Unifying Concepts and Processes space exploration in the Saturn system. A computer-generated rendering of Cassini–Huygens. • Form and function PREREQUISITE SKILLS BACKGROUND INFORMATION Science and Drawing and labeling diagrams Background for Lesson Discussion, page 122 Technology • Abilities of Assembling a spacecraft model Questions, page 127 technological Some familiarity with the Saturn Answers in Appendix 1, page 225 design system (see Lesson 1) 56–63: The Cassini–Huygens Mission 64–69: The Spacecraft 70–76: The Science Instruments 81–94: Launch and Navigation 95–101: Communications and Science Data EQUIPMENT, MATERIALS, AND TOOLS For the teacher Materials to reproduce Photocopier (for transparencies & copies) Figures 1–6 are provided at the end of Overhead projector this lesson. Chart paper (18" × 22") FIGURE TRANSPARENCY COPIES Markers; clear adhesive tape 1 1 per group 21 For each group of 3 to 4 students 3 1 1 per student Chart paper (18" × 22") 4 1 per group Markers 51 Scissors 6 (for teacher only) Clear adhesive tape or glue Various household objects: egg cartons, yogurt cartons, film canisters, wire, aluminum foil, construction paper 121 Saturn Educator Guide • Cassini Program website — http://www.jpl.nasa.gov/cassini/educatorguide • EG-1998-12-008-JPL Background for Lesson Discussion LESSON craft components and those of human body 5 The definition of a robot parts. -

Congressional Record—House H4714
H4714 CONGRESSIONAL RECORD Ð HOUSE June 20, 2000 Mr. Speaker, this is not a com- on H.R. 3859, the Social Security and Medi- The yeas and nays were ordered. plicated bill. It is very simple. It is ba- care Safe Deposit Box Act. The SPEAKER pro tempore. Pursu- sically saying that, for the first time in I thank my colleague, Congressman WALLY ant to clause 8 of rule XX and the more than 40 years, that we are not HERGER for creating this legislation which will Chair's prior announcement, further going to spend the surplus, whatever reserve Medicare surplus dollars only for re- proceedings on this motion will be that surplus is. That is, in Medicare sponsible debt reduction or spending on the postponed. and Social Security, we are not going Medicare program. f to spend it. Very simply, whatever it Soon after today's vote, seniors will no b 1500 is, we are not going to spend. It brings longer need to fear that the money set aside about a point of order to ensure that for their Medicare and well being will be used CONGRESSIONAL GOLD MEDAL TO we do not. as a big government slush fund. ASTRONAUTS NEIL A. ARM- Look how far we have come. It was Similarly to the Social Security lock box STRONG, BUZZ ALDRIN, AND MI- only a few years ago that we were look- which passed by a vote of 417±2 last year, CHAEL COLLINS. ing at deficits of $200 billion and $300 this Medicare lock box is the right thing to do; Mr. -
Active Source Seismology from Anthropogenic Sources During The
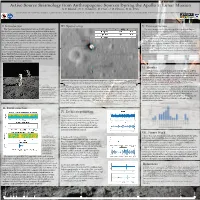
Active Source Seismology from Anthropogenic1 1 Sources2 During3 the4 Apollo 11 Lunar Mission A. S. Khatib , N. C. Schmerr , B. Feist , J. B. Plescia , N. E. Petro 1 [email protected], University of Maryland, College Park MD, 2 NASA Johnson Space Center, Houston TX, 3 Johns Hopkins University Applied Physics Laboratory, Baltimore MD, 4 NASA Goddard Space Flight Center, Greenbelt MD I. Introduction III. Spatial array V. Time correction The Passive Seismic Experiment Package (PSEP) deployed by The time-stamps on the seismic signal were generated upon the Apollo 11 astronauts Neil Armstrong and Buzz Aldrin during reception of the signal at base stations; seismic event times must their extravehicular activity (EVA) on July 21st, 1969 provided the take into account the radio wave travel time between generation first seismic data from another body in the Solar System [1,2]. The at Tranquility Base and the nearest receiving base station on Earth. primary sources of seismicity in the Apollo 11 seismic data were The travel times are calculated and subtracted from the event times. the movements and activities of the astronauts, ascent of the The time-stamps on the audio signal were generated upon Lunar Module (LM), and thermoelastic and volatile venting from reception of the signal at Mission Control in Houston; audio event the LM descent module. times must take into account the radio wave travel time between Here we use the anthropogenic sources of seismic signal from generation at Tranquility Base and the nearest receiving base station the movements of the astronauts on the surface to perform an on Earth, and the travel time between the base station and Houston. -

S.R. No. 127 Mar 0 8 2019 Senate Resolution
THE SENATE THIRTIETH LEGISLATURE, 2019 STATE OF HAWAII S.R. NO. 127 MAR 0 8 2019 SENATE RESOLUTION DESIGNATING JULY 20, 2019, AS "TRANQUILITY BASE DAY" IN HAWAII TO HONOR THE FIFTIETH ANNIVERSARY OF THE APOLLO 11 LUNAR LANDING AT TRANQUILITY BASE AND URGING THE UNITED NATIONS EDUCATIONAL, SCIENTIFIC, AND CULTURAL ORGANIZATION TO INCLUDE TRANQUILITY BASE AND ASSOCIATED ARTIFACTS ON THE WORLD HERITAGE LIST. 1 WHEREAS, July 20, 2019, is the fiftieth anniversary of the 2 historic Apollo 11 spaceflight that landed the first humans on 3 the surface of the moon at Tranquility Base; and 4 5 WHEREAS, the Apollo 11 lunar landing is one of the most 6 significant technological advancements in history; and 7 8 WHEREAS, this remarkable achievement fulfilled President 9 John F. Kennedy's goal set forth in his 1961 speech before the 10 United States Congress to send a man to the moon and return him 11 safely to Earth within a decade; and 12 13 WHEREAS, the Apollo 11 lunar landing was exceptionally 14 significant for the United States and the world, representing 15 the first time a human stepped foot on another celestial 16 surface; and 17 18 WHEREAS, the National Aeronautics and Space Administration 19 designed, led, and executed the Apollo program; and 20 21 WHEREAS, the landing site, "Tranquility Base", was named 22 after the region planned for the first human lunar landing on 23 the moon's Sea of Tranquility; and 24 25 WHEREAS, the first human landing at Tranquility Base 26 represented the combined efforts and contributions of thousands 27 of researchers, scientists, and engineers from many nations and 28 states, including Hawaii; and 29 30 WHEREAS, Hawaii's role in the Apollo program and space 31 exploration is represented by numerous facilities and programs 32 statewide, including Kauails Kbke'e Tracking Station, which 2019-2374 SR SMA-doc 1 Page 2 S.R. -

PEANUTS and SPACE FOUNDATION Apollo and Beyond
Reproducible Master PEANUTS and SPACE FOUNDATION Apollo and Beyond GRADE 4 – 5 OBJECTIVES PAGE 1 Students will: ö Read Snoopy, First Beagle on the Moon! and Shoot for the Moon, Snoopy! ö Learn facts about the Apollo Moon missions. ö Use this information to complete a fill-in-the-blank fact worksheet. ö Create mission objectives for a brand new mission to the moon. SUGGESTED GRADE LEVELS 4 – 5 SUBJECT AREAS Space Science, History TIMELINE 30 – 45 minutes NEXT GENERATION SCIENCE STANDARDS ö 5-ESS1 ESS1.B Earth and the Solar System ö 3-5-ETS1 ETS1.B Developing Possible Solutions 21st CENTURY ESSENTIAL SKILLS Collaboration and Teamwork, Communication, Information Literacy, Flexibility, Leadership, Initiative, Organizing Concepts, Obtaining/Evaluating/Communicating Ideas BACKGROUND ö According to NASA.gov, NASA has proudly shared an association with Charles M. Schulz and his American icon Snoopy since Apollo missions began in the 1960s. Schulz created comic strips depicting Snoopy on the Moon, capturing public excitement about America’s achievements in space. In May 1969, Apollo 10 astronauts traveled to the Moon for a final trial run before the lunar landings took place on later missions. Because that mission required the lunar module to skim within 50,000 feet of the Moon’s surface and “snoop around” to determine the landing site for Apollo 11, the crew named the lunar module Snoopy. The command module was named Charlie Brown, after Snoopy’s loyal owner. These books are a united effort between Peanuts Worldwide, NASA and Simon & Schuster to generate interest in space among today’s younger children. -

SPHERES Interact - Human-Machine Interaction Aboard the International Space Station
SPHERES Interact - Human-Machine Interaction aboard the International Space Station Enrico Stoll Steffen Jaekel Jacob Katz Alvar Saenz-Otero Space Systems Laboratory Massachusetts Institute of Technology 77 Massachusetts Avenue, Cambridge Massachusetts, 02139-4307, USA [email protected] [email protected] [email protected] [email protected] Renuganth Varatharajoo Department of Aerospace Engineering University Putra Malaysia 43400 Selangor, Malaysia [email protected] Abstract The deployment of space robots for servicing and maintenance operations, which are tele- operated from ground, is a valuable addition to existing autonomous systems since it will provide flexibility and robustness in mission operations. In this connection, not only robotic manipulators are of great use but also free-flying inspector satellites supporting the oper- ations through additional feedback to the ground operator. The manual control of such an inspector satellite at a remote location is challenging since the navigation in three- dimensional space is unfamiliar and large time delays can occur in the communication chan- nel. This paper shows a series of robotic experiments, in which satellites are controlled by astronauts aboard the International Space Station (ISS). The Synchronized Position Hold Engage Reorient Experimental Satellites (SPHERES) were utilized to study several aspects of a remotely controlled inspector satellite. The focus in this case study is to investigate different approaches to human-spacecraft interaction with varying levels of autonomy under zero-gravity conditions. 1 Introduction Human-machine interaction is a wide spread research topic on Earth since there are many terrestrial applica- tions, such as industrial assembly or rescue robots. Analogously, there are a number of possible applications in space such as maintenance, inspection and assembly amongst others. -

Conceptual Human-System Interface Design for a Lunar Access Vehicle
Conceptual Human-System Interface Design for a Lunar Access Vehicle Mary Cummings Enlie Wang Cristin Smith Jessica Marquez Mark Duppen Stephane Essama Massachusetts Institute of Technology* Prepared For Draper Labs Award #: SC001-018 PI: Dava Newman HAL2005-04 September, 2005 http://halab.mit.edu e-mail: [email protected] *MIT Department of Aeronautics and Astronautics, Cambridge, MA 02139 TABLE OF CONTENTS 1 INTRODUCTION..................................................................................................... 1 1.1 THE GENERAL FRAMEWORK................................................................................ 1 1.2 ORGANIZATION.................................................................................................... 2 2 H-SI BACKGROUND AND MOTIVATION ........................................................ 3 2.1 APOLLO VS. LAV H-SI........................................................................................ 3 2.2 APOLLO VS. LUNAR ACCESS REQUIREMENTS ...................................................... 4 3 THE LAV CONCEPTUAL PROTOTYPE............................................................ 5 3.1 HS-I DESIGN ASSUMPTIONS ................................................................................ 5 3.2 THE CONCEPTUAL PROTOTYPE ............................................................................ 6 3.3 LANDING ZONE (LZ) DISPLAY............................................................................. 8 3.3.1 LZ Display Introduction................................................................................. -

Apollo 13 Mission Review
APOLLO 13 MISSION REVIEW HEAR& BEFORE THE COMMITTEE ON AERONAUTICAL AND SPACE SCIENCES UNITED STATES SENATE NINETY-FIRST CONGRESS SECOR’D SESSION JUR’E 30, 1970 Printed for the use of the Committee on Aeronautical and Space Sciences U.S. GOVERNMENT PRINTING OFFICE 47476 0 WASHINGTON : 1970 COMMITTEE ON AEROKAUTICAL AND SPACE SCIENCES CLINTON P. ANDERSON, New Mexico, Chairman RICHARD B. RUSSELL, Georgia MARGARET CHASE SMITH, Maine WARREN G. MAGNUSON, Washington CARL T. CURTIS, Nebraska STUART SYMINGTON, bfissouri MARK 0. HATFIELD, Oregon JOHN STENNIS, Mississippi BARRY GOLDWATER, Arizona STEPHEN M.YOUNG, Ohio WILLIAM B. SAXBE, Ohio THOJfAS J. DODD, Connecticut RALPH T. SMITH, Illinois HOWARD W. CANNON, Nevada SPESSARD L. HOLLAND, Florida J4MES J. GEHRIG,Stad Director EVERARDH. SMITH, Jr., Professional staffMember Dr. GLENP. WILSOS,Professional #tad Member CRAIGVOORHEES, Professional Staff Nember WILLIAMPARKER, Professional Staff Member SAMBOUCHARD, Assistant Chief Clerk DONALDH. BRESNAS,Research Assistant (11) CONTENTS Tuesday, June 30, 1970 : Page Opening statement by the chairman, Senator Clinton P. Anderson-__- 1 Review Board Findings, Determinations and Recommendations-----_ 2 Testimony of- Dr. Thomas 0. Paine, Administrator of NASA, accompanied by Edgar M. Cortright, Director, Langley Research Center and Chairman of the dpollo 13 Review Board ; Dr. Charles D. Har- rington, Chairman, Aerospace Safety Advisory Panel ; Dr. Dale D. Myers, Associate Administrator for Manned Space Flight, and Dr. Rocco A. Petrone, hpollo Director -___________ 21, 30 Edgar 11. Cortright, Chairman, hpollo 13 Review Board-------- 21,27 Dr. Dale D. Mvers. Associate Administrator for Manned SDace 68 69 105 109 LIST OF ILLUSTRATIOSS 1. Internal coinponents of oxygen tank So. 2 ---_____-_________________ 22 2. -

Martian Ice How One Neutrino Changed Astrophysics Remembering Two Former League Presidents
Published by the Astronomical League Vol. 71, No. 3 June 2019 MARTIAN ICE HOW ONE NEUTRINO 7.20.69 CHANGED ASTROPHYSICS 5YEARS REMEMBERING TWO APOLLO 11 FORMER LEAGUE PRESIDENTS ONOMY T STR O T A H G E N P I E G O Contents N P I L R E B 4 . President’s Corner ASTRONOMY DAY Join a Tour This Year! 4 . All Things Astronomical 6 . Full Steam Ahead OCTOBER 5, From 37,000 feet above the Pacific Total Eclipse Flight: Chile 7 . Night Sky Network 2019 Ocean, you’ll be high above any clouds, July 2, 2019 For a FREE 76-page Astronomy seeing up to 3¼ minutes of totality in a PAGE 4 9 . Wanderers in the Neighborhood dark sky that makes the Sun’s corona look Day Handbook full of ideas and incredibly dramatic. Our flight will de- 10 . Deep Sky Objects suggestions, go to: part from and return to Santiago, Chile. skyandtelescope.com/2019eclipseflight www.astroleague.org Click 12 . International Dark-Sky Association on "Astronomy Day” Scroll 14 . Fire & Ice: How One Neutrino down to "Free Astronomy Day African Stargazing Safari Join astronomer Stephen James ̃̃̃Changed a Field Handbook" O’Meara in wildlife-rich Botswana July 29–August 4, 2019 for evening stargazing and daytime PAGE 14 18 . Remembering Two Former For more information, contact: safari drives at three luxury field ̃̃̃Astronomical League Presidents Gary Tomlinson camps. Only 16 spaces available! Astronomy Day Coordinator Optional extension to Victoria Falls. 21 . Coming Events [email protected] skyandtelescope.com/botswana2019 22 . Gallery—Moon Shots 25 . Observing Awards Iceland Aurorae September 26–October 2, 2019 26 . -
Apollo 13--200,000Miles from Earth
Apollo13"Houston,we'vegota problem." EP-76,ProducedbytheO fficeofPublicA ffairs NationalAeronauticsandSpaceAdministration W ashington,D.C.20546 U.S.GOVERNM ENT PRINTING OFFICE,1970384-459 NOTE:Nolongerinprint. .pdf version by Jerry Woodfill of the Automation, Robotics, and Simulation Division, Johnson Space Center, Houston, Texas 77058 . James A. Lovell, Jr., Commander... Fred W. Haise, Jr., Lunar Module Pilot... John L. Swigeft, Jr., Command Module Pilot. SPACECRAFT--Hey, we've got a problem here. Thus, calmly, Command Module Pilot JackSwigert gave the first intimation of serious trouble for Apollo 13--200,000miles from Earth. CAPSULECOMMUNICATOR--ThisisHouston;say again, please. SC--Houston, we've hada problem. We've hada MainBbusundervolt. By "undervolt"Swigert meant a drop in power in one of the Command/Service Module's two main electrical circuits. His report to the ground began the most grippingepisode in man's venture into space. One newspaper reporter called it the most public emergency and the most dramatic rescue in the history of exploration. SC--Andwe hada pretty large bang associatedwith the cautionandwarning here. Lunar Module Pilot Fred Haise was now on the voice channel from the spacecraft to the Mission Control Center at the National Aeronautics and Space Administration's Manned Spacecraft Center in Texas. Commander Jim Lovell would shortly be heard, then again Swigert--the backup crewman who had been thrust onto the first team only two days before launch when doctors feared that Tom Mattingly of the primary crew might come down with German measles. Equally cool, the men in Mission Control acknowledged the report and began the emergency procedures that grew into an effort by hundreds of ground controllers and thousands of technicians and scientists in NaSA contractor plants and On university campuses to solve the most complexand urgent problem yet encountered in space flight.