Foundations of Mechanism Design: a Tutorial Part 1: Key Concepts and Classical Results
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Multi-Pose Interactive Linkage Design Teaser
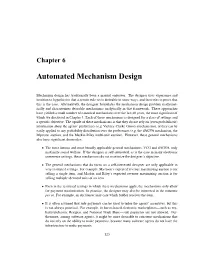
EUROGRAPHICS 2019 / P. Alliez and F. Pellacini Volume 38 (2019), Number 2 (Guest Editors) Multi-Pose Interactive Linkage Design Teaser G. Nishida1 , A. Bousseau2 , D. G. Aliaga1 1Purdue University, USA 2Inria, France a) b) e) f) Fixed bodies Moving bodies c) d) Figure 1: Interactive design of a multi-pose and multi-body linkage. Our system relies on a simple 2D drawing interface to let the user design a multi-body object including (a) fixed bodies, (b) moving bodies (green and purple shapes), (c) multiple poses for each moving body to specify the desired motion, and (d) a desired region for the linkage mechanism. Then, our system automatically generates a 2.5D linkage mechanism that makes the moving bodies traverse all input poses in a desired order without any collision (e). The system also automatically generates linkage parts ready for 3D printing and assembly (f). Please refer to the accompanying video for a demonstration of the sketching interface and animations of the resulting mechanisms. Abstract We introduce an interactive tool for novice users to design mechanical objects made of 2.5D linkages. Users simply draw the shape of the object and a few key poses of its multiple moving parts. Our approach automatically generates a one-degree-of- freedom linkage that connects the fixed and moving parts, such that the moving parts traverse all input poses in order without any collision with the fixed and other moving parts. In addition, our approach avoids common linkage defects and favors compact linkages and smooth motion trajectories. Finally, our system automatically generates the 3D geometry of the object and its links, allowing the rapid creation of a physical mockup of the designed object. -

Computing in Mechanism Design∗
Computing in Mechanism Design¤ Tuomas Sandholm Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 1. Introduction Computational issues in mechanism design are important, but have received insufficient research interest until recently. Limited computing hinders mechanism design in several ways, and presents deep strategic interactions between com- puting and incentives. On the bright side, the vast increase in computing power has enabled better mechanisms. Perhaps most interestingly, limited computing of the agents can be used as a tool to implement mechanisms that would not be implementable among computationally unlimited agents. This chapter briefly reviews some of the key ideas, with the goal of alerting the reader to the importance of these issues and hopefully spurring future research. I will discuss computing by the center, such as an auction server or vote aggregator, in Section 2. Then, in Section 3, I will address the agents’ computing, be they human or software. 2. Computing by the center Computing by the center plays significant roles in mechanism design. In the following three subsections I will review three prominent directions. 2.1. Executing expressive mechanisms As algorithms have advanced drastically and computing power has increased, it has become feasible to field mecha- nisms that were previously impractical. The most famous example is a combinatorial auction (CA). In a CA, there are multiple distinguishable items for sale, and the bidders can submit bids on self-selected packages of the items. (Sometimes each bidder is also allowed to submit exclusivity constraints of different forms among his bids.) This increase in the expressiveness of the bids drastically reduces the strategic complexity that bidders face. -

Supermodular Mechanism Design
Theoretical Economics 5(2010),403–443 1555-7561/20100403 Supermodular mechanism design L M Department of Economics, University of Texas This paper introduces a mechanism design approach that allows dealing with the multiple equilibrium problem, using mechanisms that are robust to bounded ra- tionality. This approach is a tool for constructing supermodular mechanisms, i.e., mechanisms that induce games with strategic complementarities. In quasilinear environments, I prove that if a social choice function can be implemented by a mechanism that generates bounded strategic substitutes—as opposed to strate- gic complementarities—then this mechanism can be converted into a supermod- ular mechanism that implements the social choice function. If the social choice function also satisfies some efficiency criterion, then it admits a supermodular mechanism that balances the budget. Building on these results, I address the multiple equilibrium problem. I provide sufficient conditions for a social choice function to be implementable with a supermodular mechanism whose equilibria are contained in the smallest interval among all supermodular mechanisms. This is followed by conditions for supermodular implementability in unique equilib- rium. Finally, I provide a revelation principle for supermodular implementation in environments with general preferences. K.Implementation,mechanisms,multipleequilibriumproblem,learn- ing, strategic complementarities, supermodular games. JEL .C72,D78,D83. 1. I For the economist designing contracts, taxes, or other institutions, there is a dilemma between the simplicity of a mechanism and the multiple equilibrium problem. On the one hand, simple mechanisms often restrict attention to the “right” equilibria. In public good contexts, for example, most tax schemes overlook inefficient equilibrium situa- tions, provided that one equilibrium outcome is a social optimum. -

Formation of Coalition Structures As a Non-Cooperative Game
Formation of coalition structures as a non-cooperative game Dmitry Levando, ∗ Abstract We study coalition structure formation with intra and inter-coalition externalities in the introduced family of nested non-cooperative si- multaneous finite games. A non-cooperative game embeds a coalition structure formation mechanism, and has two outcomes: an alloca- tion of players over coalitions and a payoff for every player. Coalition structures of a game are described by Young diagrams. They serve to enumerate coalition structures and allocations of players over them. For every coalition structure a player has a set of finite strategies. A player chooses a coalition structure and a strategy. A (social) mechanism eliminates conflicts in individual choices and produces final coalition structures. Every final coalition structure is a non-cooperative game. Mixed equilibrium always exists and consists arXiv:2107.00711v1 [cs.GT] 1 Jul 2021 of a mixed strategy profile, payoffs and equilibrium coalition struc- tures. We use a maximum coalition size to parametrize the family ∗Moscow, Russian Federation, independent. No funds, grants, or other support was received. Acknowledge: Nick Baigent, Phillip Bich, Giulio Codognato, Ludovic Julien, Izhak Gilboa, Olga Gorelkina, Mark Kelbert, Anton Komarov, Roger Myerson, Ariel Rubinstein, Shmuel Zamir. Many thanks for advices and for discussion to participants of SIGE-2015, 2016 (an earlier version of the title was “A generalized Nash equilibrium”), CORE 50 Conference, Workshop of the Central European Program in Economic Theory, Udine (2016), Games 2016 Congress, Games and Applications, (2016) Lisbon, Games and Optimization at St Etienne (2016). All possible mistakes are only mine. E-mail for correspondence: dlevando (at) hotmail.ru. -
Chapter on Automated Mechanism Design
Chapter 6 Automated Mechanism Design Mechanism design has traditionally been a manual endeavor. The designer uses experience and intuition to hypothesize that a certain rule set is desirable in some ways, and then tries to prove that this is the case. Alternatively, the designer formulates the mechanism design problem mathemat- ically and characterizes desirable mechanisms analytically in that framework. These approaches have yielded a small number of canonical mechanisms over the last 40 years, the most significant of which we discussed in Chapter 4. Each of these mechanisms is designed for a class of settings and a specific objective. The upside of these mechanisms is that they do not rely on (even probabilistic) information about the agents' preferences (e.g. Vickrey-Clarke-Groves mechanisms), or they can be easily applied to any probability distribution over the preferences (e.g. the dAGVA mechanism, the Myerson auction, and the Maskin-Riley multi-unit auction). However, these general mechanisms also have significant downsides: ² The most famous and most broadly applicable general mechanisms, VCG and dAGVA, only maximize social welfare. If the designer is self-interested, as is the case in many electronic commerce settings, these mechanisms do not maximize the designer's objective. ² The general mechanisms that do focus on a self-interested designer are only applicable in very restricted settings. For example, Myerson's expected revenue maximizing auction is for selling a single item, and Maskin and Riley's expected revenue maximizing auction is for selling multiple identical units of an item. ² Even in the restricted settings in which these mechanisms apply, the mechanisms only allow for payment maximization. -

Lectures in Contract Theory1
Lectures in Contract Theory1 Steve Tadelis and Ilya Segal2 UC Berkeley and Stanford University Preliminary and Incomplete December 2005 1These notes were prepared for a second year graduate course in Contract theory at Stanford University (Econ 282/291) and UC Berkeley (Econ 206). They are preliminary and incomplete. Thanks also to Debbie Johnston for typing the first version and to Scott Hemphill for excellent research assistance. 2Copyright c 1998-2005 by Steven Tadelis and Ilya Segal. All rights reserved. No part of these° notes may be reproduced in any form by any electronuic or mechanical means without writen permission from the author. Contents IIntroduction 5 0.1Tradewithsmallnumbersofagents............... 6 0.2 Incentives ............................. 7 0.3BoundedRationality....................... 8 0.4Contracts,Mechanisms,Institutions............... 8 II Hidden Information 10 1 The Principal-Agent Model 12 1.1Setup................................ 12 1.1.1 Preferences........................ 12 1.1.2 Contracting........................ 13 1.2Single-CrossingandtheMonotonicityofChoice........ 13 1.3TheFullInformationBenchmark................ 16 1.4TheRevelationPrinciple..................... 18 1.5SolutionwithTwoTypes..................... 20 1.5.1 ManyDiscreteTypes................... 24 1.6SolutionwithaContinuumofTypes.............. 25 1.6.1 TheRelaxedProblem................... 28 1.6.2 Whattodoifmonotonicitybinds(technical)...... 31 1.7ApplicationsoftheModel.................... 32 1.7.1 SecondDegreePriceDiscrimination.......... -

The Normative Gap: Mechanism Design and Ideal Theories of Justice
The Normative Gap: Mechanism Design and Ideal Theories of Justice Zoe¨ Hitzig∗ Abstract This paper investigates the peculiarities that arise when mechanism design is deployed in contexts in which issues of social, racial and distributive justice are particularly salient. Economists' involvement in redesigning Boston's algorithm for allocating K-12 students to public schools serves as an instructive case study. The paper draws on the distinction between ideal theory and non-ideal theory in political philosophy and the concept of perfor- mativity in economic sociology to argue that mechanism can enact elaborate ideal theories of justice. A normative gap thus emerges between the goals of the policymakers and the objec- tives of economic designs. As a result, mechanism design may obstruct stakeholders' avenues for normative criticism of public policies, and serve as a technology of depoliticization. Keywords: mechanism design, school choice, ideal theory, performativity ∗Department of Economics, Harvard University, 1805 Cambridge Street, Cambridge MA 02138. Email: [email protected]. URL: https://scholar.harvard.edu/hitzig 1 1 Introduction In a 2003 paper in the American Economic Review, economists Tayfun S¨onmezand Atila Ab- dulkadiro˘gluframed the thorny problem of assigning K-12 students to public schools in game theoretic terms (Abdulkadiro˘gluand S¨onmez2003). In addition to formulating school assign- ment as a problem from the branch of microeconomic theory known as mechanism design, they analyzed existing school choice allocation systems in Boston, Columbus, Minneapolis, and Seat- tle. The economists demonstrated through proofs and propositions that the existing systems have \serious shortcomings" and that adopting a different mechanism could \provide a practical solution to some of these critical school choice issues" (Abdulkadiro˘gluand S¨onmez2003: 742). -

Robust Mechanism Design∗
Robust Mechanism Design∗ Dirk Bergemann† Stephen Morris‡ First Version: December 2000 This Version: November 2001 Preliminary and incomplete Abstract The implementation literature is often criticized because the mechanisms do not seem to be robust to assumed features of the underlying environment. This paper explores one way of formalizing robustness: fixing the set of pay- off relevant types of each player, we ask whether it is possible to implement a given object on large type spaces (reflecting a lack of common knowledge the environment). We show how equilibrium implementation conditions on the universal type space translates into strong solution concepts on the original types space of payoff relevant types. Keywords: Mechanism Design, Common Knowledge, Universal Type Space, Interim Equilibrium, Ex-Post Equilibrium. Jel Classification: ∗This research is support by NSF Grant #SES-0095321. We are grateful for comments from seminar participants at the Institute for Advanced Study, the Stony Brook Game Theory Conference: Seminar on Contract Theory, and the University of Pennsylvania who heard very preliminary versions of this work. We thank Matt Jackson, Jon Levin, Zvika Neeman, Andrew Postlewaite and especially Bart Lipman for valuable discussions about the universal type space. †Department of Economics, Yale University, 28, Hillhouse Avenue, New Haven, CT 06511, [email protected]. ‡Department of Economics, Yale University, 30, Hillhouse Avenue, New Haven, CT 06511, [email protected]. “Game theory has a great advantage in explicitly analyzing the con- sequences of trading rules that presumably are really common knowl- edge; it is deficient to the extent it assumes other features to be com- mon knowledge, such as one agent’s probability assessment about an- other’s preferences or information. -

Mechanism Design: a Linear Programming Approach Rakesh V
Cambridge University Press 978-1-107-00436-8 - Mechanism Design: A Linear Programming Approach Rakesh V. Vohra Frontmatter More information Mechanism Design Mechanism design is an analytical framework for thinking clearly and carefully about exactly what a given institution can achieve when the information necessary to make decisions is dispersed and privately held. This book provides an account of the underlying mathematics of mechanism design based on linear programming. Three advantages characterize the approach. The first is simplicity: arguments based on linear programming are both elementary and transparent. The second is unity: the machinery of linear programming provides a way to unify results from disparate areas of mechanism design. The third is reach: the technique offers the ability to solve problems that appear to be beyond the reach of traditional methods. No claim is made that the approach advocated should supplant traditional mathematical machinery. Rather, the approach represents an addition to the tools of the eco- nomic theorist who proposes to understand economic phenomena through the lens of mechanism design. Rakesh V. Vohra is the John L. and Helen Kellogg Professor of Managerial Eco- nomics and Decision Sciences at the Kellogg School of Management, Northwest- ern University, where he is also Director of the Center for Mathematical Studies in Economics and Management Science. He previously taught at the Fisher School of Business, Ohio State University, and is the author of Advanced Mathematical Eco- nomics (2005). Professor Vohra has also completed a manuscript on the principles of pricing with Lakshman Krishnamurthi, Professor of Marketing at the Kellogg School. Professor Vohra received his doctorate in mathematics from the University of Maryland. -

Mechanism Design with Limited Commitment∗
Mechanism Design with Limited Commitment∗ Laura Dovaly Vasiliki Skretaz First version: April 8, 2018. This version: November 20, 2018 Abstract We develop a tool akin to the revelation principle for mechanism design with limited commitment. We identify a canonical class of mechanisms rich enough to replicate the payoffs of any equilibrium in a mechanism-selection game between an uninformed designer and a privately informed agent. A cornerstone of our methodology is the idea that a mechanism should encode not only the rules that determine the allocation, but also the information the designer obtains from the interaction with the agent. Therefore, how much the designer learns, which is the key tension in design with limited commitment, becomes an explicit part of the design. We show how this insight can be used to transform the designer's problem into a constrained optimization one: To the usual truthtelling and participation constraints, one must add the designer's sequential rationality constraint. Keywords: mechanism design, limited commitment, revelation principle, information design JEL classification: D84, D86 ∗Vasiliki Skreta acknowledges funding by the European Research Council (ERC) consolidator grant \Frontiers In Design." Other acknowledgements to be added. yCalifornia Institute of Technology, Pasadena, CA 91125. E-mail: [email protected] zUniversity of Texas at Austin, University College London, and CEPR. E-mail: [email protected] 1 1 Introduction The standard assumption in dynamic mechanism design is that the designer can commit to long-term contracts. This assumption is useful: It allows us to charac- terize the best possible payoff for the designer in the presence of adverse selection and/or moral hazard, and it is applicable in many settings. -

Dynamic Mechanism Design: a Myersonian Approach
http://www.econometricsociety.org/ Econometrica, Vol. 82, No. 2 (March, 2014), 601–653 DYNAMIC MECHANISM DESIGN: A MYERSONIAN APPROACH ALESSANDRO PAVAN Northwestern University, Evanston, IL 60208, U.S.A. ILYA SEGAL Stanford University, Stanford, CA 94305, U.S.A. JUUSO TOIKKA Massachusetts Institute of Technology, Cambridge, MA 02142, U.S.A. The copyright to this Article is held by the Econometric Society. It may be downloaded, printed and reproduced only for educational or research purposes, including use in course packs. No downloading or copying may be done for any commercial purpose without the explicit permission of the Econometric Society. For such commercial purposes contact the Office of the Econometric Society (contact information may be found at the website http://www.econometricsociety.org or in the back cover of Econometrica). This statement must be included on all copies of this Article that are made available electronically or in any other format. Econometrica, Vol. 82, No. 2 (March, 2014), 601–653 DYNAMIC MECHANISM DESIGN: A MYERSONIAN APPROACH BY ALESSANDRO PAVAN,ILYA SEGAL, AND JUUSO TOIKKA1 We study mechanism design in dynamic quasilinear environments where private in- formation arrives over time and decisions are made over multiple periods. We make three contributions. First, we provide a necessary condition for incentive compatibility that takes the form of an envelope formula for the derivative of an agent’s equilibrium expected payoff with respect to his current type. It combines the familiar marginal ef- fect of types on payoffs with novel marginal effects of the current type on future ones that are captured by “impulse response functions.” The formula yields an expression for dynamic virtual surplus that is instrumental to the design of optimal mechanisms and to the study of distortions under such mechanisms. -

Mechanism Design with Aftermarkets: Cutoff Mechanisms
Mechanism Design with Aftermarkets: Cutoff Mechanisms JOB MARKET PAPER Piotr Dworczak∗ January 10, 2017 Abstract I study a mechanism design problem of allocating a single good to one of several agents. The mechanism is followed by an aftermarket, that is, a post-mechanism game played between the agent who acquired the good and third-party market participants. The designer has preferences over final outcomes, but she cannot redesign the aftermarket. However, she can influence its information structure by disclosing information elicited by the mechanism, subject to providing incentives for agents to report truthfully. I identify a class of allocation and disclosure rules, called cutoff rules, that are implementable regardless of the form of the aftermarket and the underlying distribution of types. A mechanism can be guaranteed to be truthful in all cases only if it implements a cutoff rule. Cutoff mechanisms are tractable, and admit an indirect implementation that often makes them easy to use in practice. Sufficient conditions are given for particularly simple designs, such as a second-price auction with disclosure of the price, to be optimal within the class of cutoff mechanisms. The theory is illustrated with applications to the design of auctions followed by bargaining or resale markets, and to the optimal level of post-transaction transparency in financial over-the- counter markets. Keywords: Mechanism Design, Information Design, Disclosure, Auctions, OTC Markets JEL codes: D44, D47, D82, D83. ∗Stanford University, Graduate School of Business, E-mail: [email protected], Website: http://web.stanford.edu/∼dworczak. I am indebted to my advisors, Andy Skrzypacz and Paul Milgrom, for their con- tinuous support and guidance.