Schaum's Outline of Linear Algebra (4Th Edition)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

LINEAR ALGEBRA METHODS in COMBINATORICS László Babai
LINEAR ALGEBRA METHODS IN COMBINATORICS L´aszl´oBabai and P´eterFrankl Version 2.1∗ March 2020 ||||| ∗ Slight update of Version 2, 1992. ||||||||||||||||||||||| 1 c L´aszl´oBabai and P´eterFrankl. 1988, 1992, 2020. Preface Due perhaps to a recognition of the wide applicability of their elementary concepts and techniques, both combinatorics and linear algebra have gained increased representation in college mathematics curricula in recent decades. The combinatorial nature of the determinant expansion (and the related difficulty in teaching it) may hint at the plausibility of some link between the two areas. A more profound connection, the use of determinants in combinatorial enumeration goes back at least to the work of Kirchhoff in the middle of the 19th century on counting spanning trees in an electrical network. It is much less known, however, that quite apart from the theory of determinants, the elements of the theory of linear spaces has found striking applications to the theory of families of finite sets. With a mere knowledge of the concept of linear independence, unexpected connections can be made between algebra and combinatorics, thus greatly enhancing the impact of each subject on the student's perception of beauty and sense of coherence in mathematics. If these adjectives seem inflated, the reader is kindly invited to open the first chapter of the book, read the first page to the point where the first result is stated (\No more than 32 clubs can be formed in Oddtown"), and try to prove it before reading on. (The effect would, of course, be magnified if the title of this volume did not give away where to look for clues.) What we have said so far may suggest that the best place to present this material is a mathematics enhancement program for motivated high school students. -

Things You Need to Know About Linear Algebra Math 131 Multivariate
the standard (x; y; z) coordinate three-space. Nota- tions for vectors. Geometric interpretation as vec- tors as displacements as well as vectors as points. Vector addition, the zero vector 0, vector subtrac- Things you need to know about tion, scalar multiplication, their properties, and linear algebra their geometric interpretation. Math 131 Multivariate Calculus We start using these concepts right away. In D Joyce, Spring 2014 chapter 2, we'll begin our study of vector-valued functions, and we'll use the coordinates, vector no- The relation between linear algebra and mul- tation, and the rest of the topics reviewed in this tivariate calculus. We'll spend the first few section. meetings reviewing linear algebra. We'll look at just about everything in chapter 1. Section 1.2. Vectors and equations in R3. Stan- Linear algebra is the study of linear trans- dard basis vectors i; j; k in R3. Parametric equa- formations (also called linear functions) from n- tions for lines. Symmetric form equations for a line dimensional space to m-dimensional space, where in R3. Parametric equations for curves x : R ! R2 m is usually equal to n, and that's often 2 or 3. in the plane, where x(t) = (x(t); y(t)). A linear transformation f : Rn ! Rm is one that We'll use standard basis vectors throughout the preserves addition and scalar multiplication, that course, beginning with chapter 2. We'll study tan- is, f(a + b) = f(a) + f(b), and f(ca) = cf(a). We'll gent lines of curves and tangent planes of surfaces generally use bold face for vectors and for vector- in that chapter and throughout the course. -

Learning Geometric Algebra by Modeling Motions of the Earth and Shadows of Gnomons to Predict Solar Azimuths and Altitudes
Learning Geometric Algebra by Modeling Motions of the Earth and Shadows of Gnomons to Predict Solar Azimuths and Altitudes April 24, 2018 James Smith [email protected] https://mx.linkedin.com/in/james-smith-1b195047 \Our first step in developing an expression for the orientation of \our" gnomon: Diagramming its location at the instant of the 2016 December solstice." Abstract Because the shortage of worked-out examples at introductory levels is an obstacle to widespread adoption of Geometric Algebra (GA), we use GA to calculate Solar azimuths and altitudes as a function of time via the heliocentric model. We begin by representing the Earth's motions in GA terms. Our representation incorporates an estimate of the time at which the Earth would have reached perihelion in 2017 if not affected by the Moon's gravity. Using the geometry of the December 2016 solstice as a starting 1 point, we then employ GA's capacities for handling rotations to determine the orientation of a gnomon at any given latitude and longitude during the period between the December solstices of 2016 and 2017. Subsequently, we derive equations for two angles: that between the Sun's rays and the gnomon's shaft, and that between the gnomon's shadow and the direction \north" as traced on the ground at the gnomon's location. To validate our equations, we convert those angles to Solar azimuths and altitudes for comparison with simulations made by the program Stellarium. As further validation, we analyze our equations algebraically to predict (for example) the precise timings and locations of sunrises, sunsets, and Solar zeniths on the solstices and equinoxes. -

Determinants Math 122 Calculus III D Joyce, Fall 2012
Determinants Math 122 Calculus III D Joyce, Fall 2012 What they are. A determinant is a value associated to a square array of numbers, that square array being called a square matrix. For example, here are determinants of a general 2 × 2 matrix and a general 3 × 3 matrix. a b = ad − bc: c d a b c d e f = aei + bfg + cdh − ceg − afh − bdi: g h i The determinant of a matrix A is usually denoted jAj or det (A). You can think of the rows of the determinant as being vectors. For the 3×3 matrix above, the vectors are u = (a; b; c), v = (d; e; f), and w = (g; h; i). Then the determinant is a value associated to n vectors in Rn. There's a general definition for n×n determinants. It's a particular signed sum of products of n entries in the matrix where each product is of one entry in each row and column. The two ways you can choose one entry in each row and column of the 2 × 2 matrix give you the two products ad and bc. There are six ways of chosing one entry in each row and column in a 3 × 3 matrix, and generally, there are n! ways in an n × n matrix. Thus, the determinant of a 4 × 4 matrix is the signed sum of 24, which is 4!, terms. In this general definition, half the terms are taken positively and half negatively. In class, we briefly saw how the signs are determined by permutations. -

Problems in Abstract Algebra
STUDENT MATHEMATICAL LIBRARY Volume 82 Problems in Abstract Algebra A. R. Wadsworth 10.1090/stml/082 STUDENT MATHEMATICAL LIBRARY Volume 82 Problems in Abstract Algebra A. R. Wadsworth American Mathematical Society Providence, Rhode Island Editorial Board Satyan L. Devadoss John Stillwell (Chair) Erica Flapan Serge Tabachnikov 2010 Mathematics Subject Classification. Primary 00A07, 12-01, 13-01, 15-01, 20-01. For additional information and updates on this book, visit www.ams.org/bookpages/stml-82 Library of Congress Cataloging-in-Publication Data Names: Wadsworth, Adrian R., 1947– Title: Problems in abstract algebra / A. R. Wadsworth. Description: Providence, Rhode Island: American Mathematical Society, [2017] | Series: Student mathematical library; volume 82 | Includes bibliographical references and index. Identifiers: LCCN 2016057500 | ISBN 9781470435837 (alk. paper) Subjects: LCSH: Algebra, Abstract – Textbooks. | AMS: General – General and miscellaneous specific topics – Problem books. msc | Field theory and polyno- mials – Instructional exposition (textbooks, tutorial papers, etc.). msc | Com- mutative algebra – Instructional exposition (textbooks, tutorial papers, etc.). msc | Linear and multilinear algebra; matrix theory – Instructional exposition (textbooks, tutorial papers, etc.). msc | Group theory and generalizations – Instructional exposition (textbooks, tutorial papers, etc.). msc Classification: LCC QA162 .W33 2017 | DDC 512/.02–dc23 LC record available at https://lccn.loc.gov/2016057500 Copying and reprinting. Individual readers of this publication, and nonprofit libraries acting for them, are permitted to make fair use of the material, such as to copy select pages for use in teaching or research. Permission is granted to quote brief passages from this publication in reviews, provided the customary acknowledgment of the source is given. Republication, systematic copying, or multiple reproduction of any material in this publication is permitted only under license from the American Mathematical Society. -
From Arithmetic to Algebra
From arithmetic to algebra Slightly edited version of a presentation at the University of Oregon, Eugene, OR February 20, 2009 H. Wu Why can’t our students achieve introductory algebra? This presentation specifically addresses only introductory alge- bra, which refers roughly to what is called Algebra I in the usual curriculum. Its main focus is on all students’ access to the truly basic part of algebra that an average citizen needs in the high- tech age. The content of the traditional Algebra II course is on the whole more technical and is designed for future STEM students. In place of Algebra II, future non-STEM would benefit more from a mathematics-culture course devoted, for example, to an understanding of probability and data, recently solved famous problems in mathematics, and history of mathematics. At least three reasons for students’ failure: (A) Arithmetic is about computation of specific numbers. Algebra is about what is true in general for all numbers, all whole numbers, all integers, etc. Going from the specific to the general is a giant conceptual leap. Students are not prepared by our curriculum for this leap. (B) They don’t get the foundational skills needed for algebra. (C) They are taught incorrect mathematics in algebra classes. Garbage in, garbage out. These are not independent statements. They are inter-related. Consider (A) and (B): The K–3 school math curriculum is mainly exploratory, and will be ignored in this presentation for simplicity. Grades 5–7 directly prepare students for algebra. Will focus on these grades. Here, abstract mathematics appears in the form of fractions, geometry, and especially negative fractions. -

Span, Linear Independence and Basis Rank and Nullity
Remarks for Exam 2 in Linear Algebra Span, linear independence and basis The span of a set of vectors is the set of all linear combinations of the vectors. A set of vectors is linearly independent if the only solution to c1v1 + ::: + ckvk = 0 is ci = 0 for all i. Given a set of vectors, you can determine if they are linearly independent by writing the vectors as the columns of the matrix A, and solving Ax = 0. If there are any non-zero solutions, then the vectors are linearly dependent. If the only solution is x = 0, then they are linearly independent. A basis for a subspace S of Rn is a set of vectors that spans S and is linearly independent. There are many bases, but every basis must have exactly k = dim(S) vectors. A spanning set in S must contain at least k vectors, and a linearly independent set in S can contain at most k vectors. A spanning set in S with exactly k vectors is a basis. A linearly independent set in S with exactly k vectors is a basis. Rank and nullity The span of the rows of matrix A is the row space of A. The span of the columns of A is the column space C(A). The row and column spaces always have the same dimension, called the rank of A. Let r = rank(A). Then r is the maximal number of linearly independent row vectors, and the maximal number of linearly independent column vectors. So if r < n then the columns are linearly dependent; if r < m then the rows are linearly dependent. -

Exercise 7.5
IN SUMMARY Key Idea • A projection of one vector onto another can be either a scalar or a vector. The difference is the vector projection has a direction. A A a a u u O O b NB b N B Scalar projection of a on b Vector projection of a on b Need to Know ! ! ! ! a # b ! • The scalar projection of a on b ϭϭ! 0 a 0 cos u, where u is the angle @ b @ ! ! between a and b. ! ! ! ! ! ! a # b ! a # b ! • The vector projection of a on b ϭ ! b ϭ a ! ! b b @ b @ 2 b # b ! • The direction cosines for OP ϭ 1a, b, c2 are a b cos a ϭ , cos b ϭ , 2 2 2 2 2 2 Va ϩ b ϩ c Va ϩ b ϩ c c cos g ϭ , where a, b, and g are the direction angles 2 2 2 Va ϩ b ϩ c ! between the position vector OP and the positive x-axis, y-axis and z-axis, respectively. Exercise 7.5 PART A ! 1. a. The vector a ϭ 12, 32 is projected onto the x-axis. What is the scalar projection? What is the vector projection? ! b. What are the scalar and vector projections when a is projected onto the y-axis? 2. Explain why it is not possible to obtain! either a scalar! projection or a vector projection when a nonzero vector x is projected on 0. 398 7.5 SCALAR AND VECTOR PROJECTIONS NEL ! ! 3. Consider two nonzero vectors,a and b, that are perpendicular! ! to each other.! Explain why the scalar and vector projections of a on b must! be !0 and 0, respectively. -

MATH 304 Linear Algebra Lecture 24: Scalar Product. Vectors: Geometric Approach
MATH 304 Linear Algebra Lecture 24: Scalar product. Vectors: geometric approach B A B′ A′ A vector is represented by a directed segment. • Directed segment is drawn as an arrow. • Different arrows represent the same vector if • they are of the same length and direction. Vectors: geometric approach v B A v B′ A′ −→AB denotes the vector represented by the arrow with tip at B and tail at A. −→AA is called the zero vector and denoted 0. Vectors: geometric approach v B − A v B′ A′ If v = −→AB then −→BA is called the negative vector of v and denoted v. − Vector addition Given vectors a and b, their sum a + b is defined by the rule −→AB + −→BC = −→AC. That is, choose points A, B, C so that −→AB = a and −→BC = b. Then a + b = −→AC. B b a C a b + B′ b A a C ′ a + b A′ The difference of the two vectors is defined as a b = a + ( b). − − b a b − a Properties of vector addition: a + b = b + a (commutative law) (a + b) + c = a + (b + c) (associative law) a + 0 = 0 + a = a a + ( a) = ( a) + a = 0 − − Let −→AB = a. Then a + 0 = −→AB + −→BB = −→AB = a, a + ( a) = −→AB + −→BA = −→AA = 0. − Let −→AB = a, −→BC = b, and −→CD = c. Then (a + b) + c = (−→AB + −→BC) + −→CD = −→AC + −→CD = −→AD, a + (b + c) = −→AB + (−→BC + −→CD) = −→AB + −→BD = −→AD. Parallelogram rule Let −→AB = a, −→BC = b, −−→AB′ = b, and −−→B′C ′ = a. Then a + b = −→AC, b + a = −−→AC ′. -

Linear Algebra - Part II Projection, Eigendecomposition, SVD
Linear Algebra - Part II Projection, Eigendecomposition, SVD (Adapted from Punit Shah's slides) 2019 Linear Algebra, Part II 2019 1 / 22 Brief Review from Part 1 Matrix Multiplication is a linear tranformation. Symmetric Matrix: A = AT Orthogonal Matrix: AT A = AAT = I and A−1 = AT L2 Norm: s X 2 jjxjj2 = xi i Linear Algebra, Part II 2019 2 / 22 Angle Between Vectors Dot product of two vectors can be written in terms of their L2 norms and the angle θ between them. T a b = jjajj2jjbjj2 cos(θ) Linear Algebra, Part II 2019 3 / 22 Cosine Similarity Cosine between two vectors is a measure of their similarity: a · b cos(θ) = jjajj jjbjj Orthogonal Vectors: Two vectors a and b are orthogonal to each other if a · b = 0. Linear Algebra, Part II 2019 4 / 22 Vector Projection ^ b Given two vectors a and b, let b = jjbjj be the unit vector in the direction of b. ^ Then a1 = a1 · b is the orthogonal projection of a onto a straight line parallel to b, where b a = jjajj cos(θ) = a · b^ = a · 1 jjbjj Image taken from wikipedia. Linear Algebra, Part II 2019 5 / 22 Diagonal Matrix Diagonal matrix has mostly zeros with non-zero entries only in the diagonal, e.g. identity matrix. A square diagonal matrix with diagonal elements given by entries of vector v is denoted: diag(v) Multiplying vector x by a diagonal matrix is efficient: diag(v)x = v x is the entrywise product. Inverting a square diagonal matrix is efficient: 1 1 diag(v)−1 = diag [ ;:::; ]T v1 vn Linear Algebra, Part II 2019 6 / 22 Determinant Determinant of a square matrix is a mapping to a scalar. -

Basics of Linear Algebra
Basics of Linear Algebra Jos and Sophia Vectors ● Linear Algebra Definition: A list of numbers with a magnitude and a direction. ○ Magnitude: a = [4,3] |a| =sqrt(4^2+3^2)= 5 ○ Direction: angle vector points ● Computer Science Definition: A list of numbers. ○ Example: Heights = [60, 68, 72, 67] Dot Product of Vectors Formula: a · b = |a| × |b| × cos(θ) ● Definition: Multiplication of two vectors which results in a scalar value ● In the diagram: ○ |a| is the magnitude (length) of vector a ○ |b| is the magnitude of vector b ○ Θ is the angle between a and b Matrix ● Definition: ● Matrix elements: ● a)Matrix is an arrangement of numbers into rows and columns. ● b) A matrix is an m × n array of scalars from a given field F. The individual values in the matrix are called entries. ● Matrix dimensions: the number of rows and columns of the matrix, in that order. Multiplication of Matrices ● The multiplication of two matrices ● Result matrix dimensions ○ Notation: (Row, Column) ○ Columns of the 1st matrix must equal the rows of the 2nd matrix ○ Result matrix is equal to the number of (1, 2, 3) • (7, 9, 11) = 1×7 +2×9 + 3×11 rows in 1st matrix and the number of = 58 columns in the 2nd matrix ○ Ex. 3 x 4 ॱ 5 x 3 ■ Dot product does not work ○ Ex. 5 x 3 ॱ 3 x 4 ■ Dot product does work ■ Result: 5 x 4 Dot Product Application ● Application: Ray tracing program ○ Quickly create an image with lower quality ○ “Refinement rendering pass” occurs ■ Removes the jagged edges ○ Dot product used to calculate ■ Intersection between a ray and a sphere ■ Measure the length to the intersection points ● Application: Forward Propagation ○ Input matrix * weighted matrix = prediction matrix http://immersivemath.com/ila/ch03_dotprodu ct/ch03.html#fig_dp_ray_tracer Projections One important use of dot products is in projections. -
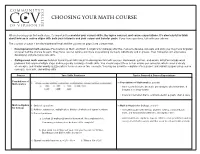
Choosing Your Math Course
CHOOSING YOUR MATH COURSE When choosing your first math class, it’s important to consider your current skills, the topics covered, and course expectations. It’s also helpful to think about how each course aligns with both your interests and your career and transfer goals. If you have questions, talk with your advisor. The courses on page 1 are developmental-level and the courses on page 2 are college-level. • Developmental math courses (Foundations of Math and Math & Algebra for College) offer the chance to develop concepts and skills you may have forgotten or never had the chance to learn. They focus less on lecture and more on practicing concepts individually and in groups. Your homework will emphasize developing and practicing new skills. • College-level math courses build on foundational skills taught in developmental math courses. Homework, quizzes, and exams will often include word problems that require multiple steps and incorporate a variety of math skills. You should expect three to four exams per semester, which cover a variety of concepts, and shorter weekly quizzes which focus on one or two concepts. You may be asked to complete a final project and submit a paper using course concepts, research, and writing skills. Course Your Skills Readiness Topics Covered & Course Expectations Foundations of 1. All multiplication facts (through tens, preferably twelves) should be memorized. In Foundations of Mathematics, you will: Mathematics • learn to use frections, decimals, percentages, whole numbers, & 2. Whole number addition, subtraction, multiplication, division (without a calculator): integers to solve problems • interpret information that is communicated in a graph, chart & table Math & Algebra 1.