Differential Amplifiers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 10 Differential Amplifiers
Chapter 10 Differential Amplifiers 10.1 General Considerations 10.2 Bipolar Differential Pair 10.3 MOS Differential Pair 10.4 Cascode Differential Amplifiers 10.5 Common-Mode Rejection 10.6 Differential Pair with Active Load 1 Audio Amplifier Example An audio amplifier is constructed as above that takes a rectified AC voltage as its supply and amplifies an audio signal from a microphone. CH 10 Differential Amplifiers 2 “Humming” Noise in Audio Amplifier Example However, VCC contains a ripple from rectification that leaks to the output and is perceived as a “humming” noise by the user. CH 10 Differential Amplifiers 3 Supply Ripple Rejection vX Avvin vr vY vr vX vY Avvin Since both node X and Y contain the same ripple, their difference will be free of ripple. CH 10 Differential Amplifiers 4 Ripple-Free Differential Output Since the signal is taken as a difference between two nodes, an amplifier that senses differential signals is needed. CH 10 Differential Amplifiers 5 Common Inputs to Differential Amplifier vX Avvin vr vY Avvin vr vX vY 0 Signals cannot be applied in phase to the inputs of a differential amplifier, since the outputs will also be in phase, producing zero differential output. CH 10 Differential Amplifiers 6 Differential Inputs to Differential Amplifier vX Avvin vr vY Avvin vr vX vY 2Avvin When the inputs are applied differentially, the outputs are 180° out of phase; enhancing each other when sensed differentially. CH 10 Differential Amplifiers 7 Differential Signals A pair of differential signals can be generated, among other ways, by a transformer. -

Differential Amplifiers
www.getmyuni.com Operational Amplifiers: The operational amplifier is a direct-coupled high gain amplifier usable from 0 to over 1MH Z to which feedback is added to control its overall response characteristic i.e. gain and bandwidth. The op-amp exhibits the gain down to zero frequency. Such direct coupled (dc) amplifiers do not use blocking (coupling and by pass) capacitors since these would reduce the amplification to zero at zero frequency. Large by pass capacitors may be used but it is not possible to fabricate large capacitors on a IC chip. The capacitors fabricated are usually less than 20 pf. Transistor, diodes and resistors are also fabricated on the same chip. Differential Amplifiers: Differential amplifier is a basic building block of an op-amp. The function of a differential amplifier is to amplify the difference between two input signals. How the differential amplifier is developed? Let us consider two emitter-biased circuits as shown in fig. 1. Fig. 1 The two transistors Q1 and Q2 have identical characteristics. The resistances of the circuits are equal, i.e. RE1 = R E2, RC1 = R C2 and the magnitude of +VCC is equal to the magnitude of �VEE. These voltages are measured with respect to ground. To make a differential amplifier, the two circuits are connected as shown in fig. 1. The two +VCC and �VEE supply terminals are made common because they are same. The two emitters are also connected and the parallel combination of RE1 and RE2 is replaced by a resistance RE. The two input signals v1 & v2 are applied at the base of Q1 and at the base of Q2. -

621 212 Electronics and Communication Engineering Ec6304/Linear Integrated Circuits
DSEC/ECE/EC6304-LIC/QB 1 DHANALAKSHMI SRINIVASAN ENGINEERING COLLEGE -621 212 ELECTRONICS AND COMMUNICATION ENGINEERING EC6304/LINEAR INTEGRATED CIRCUITS QUESTION BANK UNIT 1(2 MARKS) 1. What is an integrated circuit? APRIL/MAY 2010 An integrated circuit (IC) is a miniature, low cost electronic circuit consisting of active and Passive components fabricated together on a single crystal of silicon. The active components are Transistors and diodes and passive components are resistors and capacitors. 2. What is current mirror? APRIL/MAY 2010 A constant current source (current mirror) makes use of the fact that for a transistor in the active mode of operation, the collector current is relatively independent of the collector voltage 3. What are two requirements to be met for a good current source? MAY/JUNE 2012 a. Superior insensitivity of circuit performance to power supply variations and temperature. b. More economical than resistors in terms of die area required providing bias currents of small value. c. When used as load element, the high incremental resistance of current source results in high voltage gains at low supply voltages. 4. What are all the important characteristics of ideal op-amp? APRIL/MAY 2015 Ideal characteristics of OPAMP 1. Open loop gain infinite 2. Input impedance infinite 3. Output impedance low 4. Bandwidth infinite 5. Zero offset, ie, Vo=0 when V1=V2=0 5. Define CMRR of OP-AMP APRIL/MAY 2011 The relative sensitivity of an op-amp to a difference signal as compared to a common - mode signal is called the common -mode rejection ratio. It is expressed in decibels. -

Fully-Differential Amplifiers
Application Report S Fully-Differential Amplifiers James Karki AAP Precision Analog ABSTRACT Differential signaling has been commonly used in audio, data transmission, and telephone systems for many years because of its inherent resistance to external noise sources. Today, differential signaling is becoming popular in high-speed data acquisition, where the ADC’s inputs are differential and a differential amplifier is needed to properly drive them. Two other advantages of differential signaling are reduced even-order harmonics and increased dynamic range. This report focuses on integrated, fully-differential amplifiers, their inherent advantages, and their proper use. It is presented in three parts: 1) Fully-differential amplifier architecture and the similarities and differences from standard operational amplifiers, their voltage definitions, and basic signal conditioning circuits; 2) Circuit analysis (including noise analysis), provides a deeper understanding of circuit operation, enabling the designer to go beyond the basics; 3) Various application circuits for interfacing to differential ADC inputs, antialias filtering, and driving transmission lines. Contents 1 Introduction . 3 2 What Is an Integrated, Fully-Differential Amplifier? . 3 3 Voltage Definitions . 5 4 Increased Noise Immunity . 5 5 Increased Output Voltage Swing . 6 6 Reduced Even-Order Harmonic Distortion . 6 7 Basic Circuits . 6 8 Circuit Analysis and Block Diagram . 8 9 Noise Analysis . 13 10 Application Circuits . 15 11 Terminating the Input Source . 15 12 Active Antialias Filtering . 20 13 VOCM and ADC Reference and Input Common-Mode Voltages . 23 14 Power Supply Bypass . 25 15 Layout Considerations . 25 16 Using Positive Feedback to Provide Active Termination . 25 17 Conclusion . 27 1 SLOA054E List of Figures 1 Integrated Fully-Differential Amplifier vs Standard Operational Amplifier. -
Mosfet Differential Amplifier (Two-Week Lab)
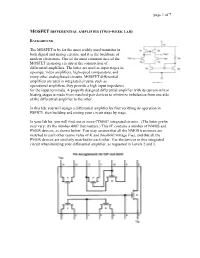
page 1 of 7 MOSFET DIFFERENTIAL AMPLIFIER (TWO-WEEK LAB) BACKGROUND The MOSFET is by far the most widely used transistor in both digital and analog circuits, and it is the backbone of modern electronics. One of the most common uses of the MOSFET in analog circuits is the construction of differential amplifiers. The latter are used as input stages in op-amps, video amplifiers, high-speed comparators, and many other analog-based circuits. MOSFET differential amplifiers are used in integrated circuits, such as operational amplifiers, they provide a high input impedance for the input terminals. A properly designed differential amplifier with its current-mirror biasing stages is made from matched-pair devices to minimize imbalances from one side of the differential amplifier to the other. In this lab, you will design a differential amplifier by first verifying its operation in PSPICE, then building and testing your circuit stage by stage. In your lab kit, you will find one or more CD4007 integrated circuits. (The letter prefix may vary; it's the number 4007 that matters.) This IC contains a number of NMOS and PMOS devices, as shown below. You may assume that all the NMOS transistors are matched to each other (same value of K and threshold voltage VTR), and that all the PMOS devices are similarly matched to each other. Use the devices in this integrated circuit when building your differential amplifier, as requested in Levels 2 and 3. page 2 of 7 BACKGROUND The general topology of a differential amplifier is shown below. Two active devices are connected to a positive voltage supply via passive series elements. -

Lsk389 Application Note Dual Monolithic Jfet for Ultra-Low Noise Applications
Over 30 Years of Quality Through Innovation LSK389 APPLICATION NOTE DUAL MONOLITHIC JFET FOR ULTRA-LOW NOISE APPLICATIONS By: Bob Cordell 01/21/2020 REV. A3 Linear Integrated Systems • 4042 Clipper Court • Fremont, CA 94538 • Tel: 510 490-9160 • Fax: 510 353-0261 • Email: [email protected] LINEAR SYSTEMS LSK389 DUAL MONOLITHIC JFET FOR ULTRA-LOW NOISE APPLICATIONS Features Applications ▪ Low Wideband Noise ▪ Low Noise Amplifiers ▪ Low 1/f Noise ▪ Differential Amplifiers ▪ High Transconductance ▪ High Input Impedance Amplifiers ▪ Well-Matched Threshold Voltages ▪ Phono and Other Audio Preamps ▪ High gm/Capacitance Ratio ▪ Condenser Microphone Preamps ▪ Industry's First 100% Noise-Tested JFET ▪ Electrometers ▪ Piezoelectric Sensor Preamps ▪ Front-end for Low-Noise Op Amps Introduction The LSK389 is the industry’s lowest noise Dual N-Channel JFET, 100% tested, guaranteed to meet 1/f and broadband noise specifications, while eliminating burst (RTN or popcorn) noise entirely. The product displays high transconductance and very good matching. It is the JFET of choice for low noise applications, especially those requiring a differential amplifier input stage. LSK389 Key Specifications ▪ 1.3 nV/√Hz input noise at 1 kHz, ID = 2 mA ▪ 1.5 nV/√Hz at 10 Hz, ID = 2 mA ▪ 14 mS transconductance at ID = 2 mA ▪ Improved DC offset ±15 mV max. ▪ CISS = 25 pF typ. ▪ CRSS = 5.5 pF typ. ▪ Breakdown voltage = 40 V min. ▪ 4 grades of IDSS available (A, B, C, D) N-Channel JFET Basics The simplified equation below describes the DC operation of a JFET [1]. The term Vt is the threshold voltage. The term is the transconductance coefficient of the JFET (not to be confused with BJT current gain). -

Fully Differential Op Amps Made Easy
Application Report SLOA099 - May 2002 Fully Differential Op Amps Made Easy Bruce Carter High Performance Linear ABSTRACT Fully differential op amps may be unfamiliar to some designers. This application report gives designers the essential information to get a fully differential design up and running. Contents 1 Introduction . 2 2 What Does Fully Differential Mean?. 2 3 How Is the Second Output Used?. 3 3.1 Differential Gain Stages. 3 3.2 Single-Ended to Differential Conversion. 4 3.3 Working With Terminated Inputs. 5 4 A New Function . 7 5 Conclusions . 8 6 References . 9 List of Figures 1 Single-Ended Op Amp Schematic Symbol. 2 2 Fully Differential Op Amp Schematic Symbol. 2 3 Closing the Loop on a Single-Ended Op Amp. 3 4 Closing the Loop on a Fully Differential Op Amp. 3 5 Single Ended to Differential Conversion. 4 6 Relationship Between Vin, Vout+, and Vout– . 5 7 Fully Differential Amplifier Component Calculator. 6 8 Using a Fully Differential Op Amp to Drive an ADC. 7 9 Effect of Vocm on Vout+ and Vout– . 8 1 SLOA099 1 Introduction Fully differential op amps may be intimidating to some designers, But op amps began as fully differential components over 50 years ago. Techniques about how to use the fully differential versions have been almost lost over the decades. However, today’s fully differential op amps offer performance advantages unheard of in those first units. This report does not attempt a detailed analysis of op amp theory; reference 1 covers theory well. Instead, this report presents just the facts a designer needs to get started, and some resources for further design assistance. -

The Differential Amplifier
The Differential amplifier - An Intuitive Look We will now take a look at a very versatile amplifier circuit called the differential amplifier. This amplifier is at the heart of many analog integrated circuits. We will look at the circuit only close enough to get a good intuitive feel for how it works and what it can do. Vcc rc1 rc2 1K 1K Q1 Q2 rb1 Vc1 Vc2 rb2 + + Vin1 Vin2 - - 5mA The Differential Amplifier The differential amplifier operates by amplifying the difference between two separate inputs. These inputs are marked above as Vin1 and Vin2. Note that the amplifier is symmetrical about a center line going through the 5ma current source. For the sake of this explanation, we will consider the 5mA current source to be “not quite” ideal. In this case, it means that the current source is only able to drive its upper terminal to zero volts when attempting to force a mini- mum of 5mA to flow to ground. However, it will never allow more than 5mA to flow no matter how much base current is forced into Q1 andQ2. To understand the operation of the amplifier, we will assume that Vin1 and Vin2 are equal in magnitude. Within the operating region for the amplifier, this will cause equal base and emit- ter currents to flow through each transistor. Since the current source will not allow more than 5mA of current to flow, the current through rc1 and rc2 will be exactly 2.5ma. This causes a potential of 2.5 volts to appear at Vc1 and Vc2. -

High Input Resistance Circuits: DARLINGTON PAIR
HRckts.doc 1 High Input Resistance circuits: The ideal voltage amplifier should have infinite input impedance and zero output impedance. The CC and CE with Re basic amplifiers have these properties. The Input impedance of these amplifiers is Ri = hie+(1+hfe)Re using the simplified model (assuming that hfeRe << 0.1) As Re ® ¥ this equation suggests that Ri ® ¥ . However, as Re ® ¥ the assumption hfeRe << 0.1 is no longer valid. And the more accurate equation is Ri = hie + (1+hfe)Re / (1+hoeRe) which ® hfe/hoe This is a theoretical limitation on Ri. There are other practical limitations also. 1. As Re increases the bias current causes a larger voltage drop across it. For middle of operating range VCE = VRe = VCC/2. We thus require larger impractical power supply voltage 2. In integrated circuits Re occupies chip area. Larger the value, greater is the chip area occupied, leaving less for other components. 3. Bias resistance appear in parallel with the Ri and with typical values of a few 100K the parallel combination RI is now decided by the bias resistance, and is hence lower. Solutions: The problems (1) and (2) are due to the fact that we are thinking of Re as Ohmic physical resistance. If Re is an equivalent resistance, created by a relatively smaller physical resistance in another CC circuit, this problem can be solved. (The DARLINGTON PAIR circuit). The bias resistance problem (3) may be solved by the BOOTSTRAPPING technique. DARLINGTON PAIR: The Darlington pair is a cascade of two common collector circuits as shown. With input resistance of Q2 acting as Re for Q1.Q1 thus sees a large equivalent Re, but the physical resistance producing this effect is R2 which is much smaller. -
Module 4-5-Differential Amplifiers
EE105 – Fall 2015 Microelectronic Devices and Circuits Module 4-5: DifferentialAmplifiers Prof. Ming C. Wu [email protected] 511 Sutardja Dai Hall (SDH) Differential & Common Mode Signals Why Differential? • Differential circuits are much less sensitive to noises and interferences • Differential configuration enables us to bias amplifiers and connect multiple stages without using coupling or bypass capacitors • Differential amplifiers are widely used in IC’s – Excellent matching of transistors, which is critical for differential circuits – Differential circuits require more transistorsà not an issue for IC Neural Recording An array of electrodes is implanted in the motor cortex and senses extracellular signals that include firing from nearbyneurons The propagation of signals from neuron to neuron is called an Action Potential, which is analogous to a digital “pulse” Extracellular Neuronal Signals oltage V Local Field Potential (LFP) 1Hz-300Hz;; 10µV-1mV Action Potential “spikes” 300Hz- Time 10kHz 10µV-1mV l The goal of a neural recording device is to record - the small amplitude neural signals and pick out the meaningful signals from the “noise”. l These signals are then decoded to create trajectories, movements, and speeds for controlling prostheses, computers, etc. 60Hz and Other Interferers 60 Hz Action Noise Potentials • In reality, the tiny signals recorded from the brain can get corrupted by numerous interferers. • Ambient 60Hz noise couples into electrical signals in and on the body • Motion can cause voltage artifacts -

INA118 Precision, Low-Power Instrumentation Amplifier Datasheet
Product Order Technical Tools & Support & Folder Now Documents Software Community INA118 SBOS027B –SEPTEMBER 2000–REVISED APRIL 2019 INA118 Precision, Low-Power Instrumentation Amplifier A newer version of this device is now available: INA818 1 Features 3 Description The INA118 is a low-power, general-purpose 1• A newer version of this device is now available: INA818 instrumentation amplifier offering excellent accuracy. The versatile, three op amp design and small size • Low offset voltage: 50 µV, maximum make this device an excellent choice for a wide range • Low drift: 0.5 µV/°C, maximum of applications. Current-feedback input circuitry • Low input bias current: 5 nA, maximum provides wide bandwidth, even at high gain (70 kHz at G = 100). • High CMR: 110 dB, minimum • Inputs protected to ±40 V A single external resistor sets any gain from 1 to 10000. Internal input protection can withstand up to • Wide supply range: ±1.35 to ±18 V ±40 V without damage. • Low quiescent current: 350 µA The INA118 is laser-trimmed for low offset voltage • Packages: 8-Pin plastic DIP, SO-8 (50 µV), drift (0.5 µV/°C), and high common-mode rejection (110 dB at G = 1000). The INA118 operates 2 Applications with power supplies as low as ±1.35 V, and quiescent • Bridge amplifiers current is only 350 µA, making this device an excellent choice for battery-operated systems. • Thermocouple amplifiers • RTD Sensor amplifiers The INA118 is available in 8-pin plastic DIP and SO-8 surface-mount packages, and specified for the –40°C • Medical instrumentation to +85°C temperature range. -

LTC6362 Fully Differential Amplifier
DEMO MANUAL DC1833A LTC6362 Fully Differential Amplifier DESCRIPTION The LTC®6362 is a low power, low noise differential op amp the differential inputs of an ADC. The LTC6362 differential with rail-to-rail input and output swing that has been output can be DC-coupled or AC-coupled (AC-coupled is optimized to drive low power SAR ADCs. The amplifier may the default configuration). Onboard jumpers configure be configured to buffer a fully differential input signal or the DC1833A for dual or single power supply. In addition, convert a single-ended input signal to a differential output there are several optional surface mount pads that can be signal. Demo circuit 1833A contains the LTC6362 amplifier used to change the LTC6362 configuration. configured as a unity gain amplifier with 1kΩ feedback Design files for this circuit board are available at and input resistors, where both inputs are AC-coupled by http://www.linear.com/demo a 1μF capacitor. The differential outputs of the DC1833A L, LT, LTC, LTM, Linear Technology and the Linear logo are registered trademarks of Linear can be configured with a first order RC network for driving Technology Corporation. All other trademarks are the property of their respective owners. PERFORMANCE SUMMARY This demo board is factory tested by measuring distortion with an 8VP-P, 2kHz differential input, as given in Table 1. (TA = 25°C) Table 1. LTC6362 Noise and Distortion Differential Input, Referred Noise Voltage Density 3.9nV/√Hz Distortion, 8VP-P Differential Input, VS = 5V, FIN = 2kHz, RLOAD = 1000Ω 2nd Harmonic –128dBc 3rd Harmonic –114dBc 2kHz Sine Wave, VIN Diff 8VP-P 16384 –Point FFT 0 V+ = 5V –10 V– = 0V –20 HD2 = –128dBc R6, 1k R3, 1k – –30 HD3 = –114dBc VIN + –40 V 0.1μF –50 –60 – + R15 + –70 VOUT –80 VOCM C18 C19 LTC6362 C –90 – DIFF + R14 C15 MAGNITUDE (dB) 0.1μF – VOUT –100 –110 R5, 1k R4, 1k –120 + V DC1833A F01a IN –130 –140 –150 0 2 468 10 12 1416 18 20 FREQUENCY (kHz) DC1833A FO1b Figure 1.