Team-Fly® Linux 3D Graphics Programming
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solaris 2.5 Software Developer Kit Introduction
Solaris 2.5 Software Developer Kit Introduction 2550 Garcia Avenue Mountain View, CA 94043 U.S.A. A Sun Microsystems, Inc. Business 1995 Sun Microsystems, Inc. 2550 Garcia Avenue, Mountain View, California 94043-1100 U.S.A. All rights reserved. This product or document is protected by copyright and distributed under licenses restricting its use, copying, distribution and decompilation. No part of this product or document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Portions of this product may be derived from the UNIX® system, licensed from UNIX Systems Laboratories, Inc., a wholly owned subsidiary of Novell, Inc., and from the Berkeley 4.3 BSD system, licensed from the University of California. Third-party software, including font technology in this product, is protected by copyright and licensed from Sun’s Suppliers. RESTRICTED RIGHTS LEGEND: Use, duplication, or disclosure by the government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227-7013 and FAR 52.227-19. The product described in this manual may be protected by one or more U.S. patents, foreign patents, or pending applications. TRADEMARKS Sun, Sun Microsystems, the Sun logo, SunSoft, the SunSoft logo, Solaris, SunOS, OpenWindows, DeskSet, ONC, ONC+, NFS, SunExpress, ProCompiler, XView, ToolTalk, XGL, XIL, Solaris VISUAL, Solaris PEX, and AnswerBook are trademarks or registered trademarks of Sun Microsystems, Inc. in the United States and other countries. CatalystSM is a service mark of Sun Microsystems, Inc. -

The Elinks Manual the Elinks Manual Table of Contents Preface
The ELinks Manual The ELinks Manual Table of Contents Preface.......................................................................................................................................................ix 1. Getting ELinks up and running...........................................................................................................1 1.1. Building and Installing ELinks...................................................................................................1 1.2. Requirements..............................................................................................................................1 1.3. Recommended Libraries and Programs......................................................................................1 1.4. Further reading............................................................................................................................2 1.5. Tips to obtain a very small static elinks binary...........................................................................2 1.6. ECMAScript support?!...............................................................................................................4 1.6.1. Ok, so how to get the ECMAScript support working?...................................................4 1.6.2. The ECMAScript support is buggy! Shall I blame Mozilla people?..............................6 1.6.3. Now, I would still like NJS or a new JS engine from scratch. .....................................6 1.7. Feature configuration file (features.conf).............................................................................7 -

SUSE® Linux Enterprise Desktop 12 and the Workstation Extension: What's New ?
SUSE® Linux Enterprise Desktop 12 and the Workstation Extension: What's New ? Frédéric Crozat <[email protected]> Enterprise Desktop Release Manager Scott Reeves <[email protected]> Enterprise Desktop Development Manager Agenda • Design Criteria • Desktop Environment in SUSE Linux Enterprise 12 • GNOME Shell • Desktop Features and Applications 2 Design Criteria SUSE Linux Enterprise Desktop Interoperability Ease of Use Security Ease of Management Lower Costs 4 SUSE Linux Enterprise Desktop 12 • Focus on technical workstation ‒ Developers and System administrators • One tool for the job • Main desktop applications will be shipped: ‒ Mail client, Office Suite, Graphical Editors, ... • SUSE Linux Enterprise Workstation Extension ‒ Extend SUSE Linux Enterprise Server with packages only available on SUSE Linux Enterprise Desktop. (x86-64 only) 5 Desktop in SUSE Linux Enterprise 12 As Part of the Common Code Base SUSE Linux Enterprise 12 Desktop Environment • SUSE Linux Enterprise 12 contains one primary desktop environment • Additional light-weight environment for special use-cases: ‒ Integrated Systems • Desktop environment is shared between the server and desktop products 7 SUSE Linux Enterprise 12 Desktop Environment • GNOME 3 is the main desktop environment ‒ SLE Classic mode by default ‒ GNOME 3 Classic Mode and GNOME 3 Shell Mode also available • SUSE Linux Enterprise 12 ships also lightweight IceWM ‒ Targeted at Integrated Systems • QT fully supported: ‒ QT5 supported for entire SLE12 lifecycle ‒ QT4 supported, will be removed in future -

Direct Xlib User's Guide
Direct Xlib User’s Guide 2550 Garcia Avenue Mountain View, CA 94043 U.S.A. A Sun Microsystems, Inc. Business 1995 Sun Microsystems, Inc. 2550 Garcia Avenue, Mountain View, California 94043-1100 U.S.A. All rights reserved. This product or document is protected by copyright and distributed under licenses restricting its use, copying, distribution and decompilation. No part of this product or document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Portions of this product may be derived from the UNIX® system, licensed from UNIX Systems Laboratories, Inc., a wholly owned subsidiary of Novell, Inc., and from the Berkeley 4.3 BSD system, licensed from the University of California. Third-party software, including font technology in this product, is protected by copyright and licensed from Sun’s Suppliers. RESTRICTED RIGHTS LEGEND: Use, duplication, or disclosure by the government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227-7013 and FAR 52.227-19. The product described in this manual may be protected by one or more U.S. patents, foreign patents, or pending applications. TRADEMARKS Sun, Sun Microsystems, the Sun logo, SunSoft, the SunSoft logo, Solaris, SunOS, OpenWindows, Direct Xlib, DeskSet, ONC, ONC+, and NFS are trademarks or registered trademarks of Sun Microsystems, Inc. in the United States and other countries. UNIX is a registered trademark in the United States and other countries, exclusively licensed through X/Open Company, Ltd. -

Release Notes for Xfree86® 4.8.0 the Xfree86 Project, Inc December 2008
Release Notes for XFree86® 4.8.0 The XFree86 Project, Inc December 2008 Abstract This document contains information about the various features and their current sta- tus in the XFree86 4.8.0 release. 1. Introduction to the 4.x Release Series XFree86 4.0 was the first official release of the XFree86 4 series. The current release (4.8.0) is the latest in that series. The XFree86 4.x series represents a significant redesign of the XFree86 X server,with a strong focus on modularity and configurability. 2. Configuration: aQuickSynopsis Automatic configuration was introduced with XFree86 4.4.0 which makes it possible to start XFree86 without first creating a configuration file. This has been further improved in subsequent releases. If you experienced any problems with automatic configuration in a previous release, it is worth trying it again with this release. While the initial automatic configuration support was originally targeted just for Linux and the FreeBSD variants, as of 4.5.0 it also includes Solaris, NetBSD and OpenBSD support. Full support for automatic configuration is planned for other platforms in futurereleases. If you arerunning Linux, FreeBSD, NetBSD, OpenBSD, or Solaris, try Auto Configuration by run- ning: XFree86 -autoconfig If you want to customise some things afterwards, you can cut and paste the automatically gener- ated configuration from the /var/log/XFree86.0.log file into an XF86Config file and make your customisations there. If you need to customise some parts of the configuration while leav- ing others to be automatically detected, you can combine a partial static configuration with the automatically detected one by running: XFree86 -appendauto If you areusing a platform that is not currently supported, then you must try one of the older methods for getting started like "xf86cfg", which is our graphical configuration tool. -

No Starch Press, Inc
Table of Contents The Book of VMware—The Complete Guide to VMware Workstation.......................................................1 Chapter 1: Introduction.....................................................................................................................................3 Overview..................................................................................................................................................3 1.1 Who Should Read This Book............................................................................................................3 1.2 Terms and Conventions.....................................................................................................................4 1.3 Book Layout......................................................................................................................................4 1.4 VMware Applications........................................................................................................................6 1.4.1 Quality Assurance (QA)....................................................................................................6 1.4.2 Network Programming and Testing...................................................................................6 1.4.3 Operating System Development, Research, and Education..............................................7 1.4.4 Other VMware Products....................................................................................................7 Chapter 2: The VMware Virtual Machine.......................................................................................................8 -

MX Linux Benutzerhandbuch V
MX Linux Benutzerhandbuch v. 20210327 manual AT mxlinux DOT org MX Linux Webseite MX Linux deutschsprachiges Forum Strg-F = Dieses Handbuch durchsuchen Pos1 / Home = Zum Anfang des Dokuments Translation: Sigi Vranšak – SpinBit Informatik Schaan, 27.03.2021 Tools: LibreOffice 7.0.4, deepl.com Rückmeldungen zu diesem deutschsprachigen Handbuch bitte an: [email protected] OpenPGP 51F0D5C53CF46E29 Titel des englischen Originals: MX Linux Users Manual v. 20200801 Inhalt 1 Einleitung.........................................................................................................................................7 1.1 Über MX Linux..........................................................................................................................7 1.2 Über dieses Handbuch.............................................................................................................7 1.3 Systemanforderungen..............................................................................................................8 1.4 Unterstützung und «Lebensdauer» (EOL, End Of Life)...........................................................8 1.5 Fehler, Probleme und Anfragen, Anträge.................................................................................9 1.6 Migration, Upgrade (Aktualisierung nächste Hauptversion)..................................................10 1.7 Unsere Standpunkte...............................................................................................................10 1.7.1 Systemd..........................................................................................................................10 -

Open Windows Version 3 Installation and Start-Up Guide E 1991 by Sun Microsystems, Inc.-Printed in USA
Open Windows Version 3 Installation and Start-Up Guide e 1991 by Sun Microsystems, Inc.-Printed in USA. 2550 Garcia Avenue, Mountain View, California 94043-1100 All rights reserved. No part of this work covered by copyright may be reproduced in any form or by any means-graphic, electronic or mechanical, including photocopying, recording, taping, or storage in an information retrieval system- without prior written permission of the copyright owner. The OPEN LOOK and the Sun Graphical User Interfaces were developed by Sun Microsystems, Inc. for its users and licensees. Sun acknowledges the pioneering efforts of Xerox in researching and developing the concept of visual or graphical user interfaces for the com puter industry. Sun holds a non-exclusive license from Xerox to the Xerox Graphical User Interface, which license also covers Sun's licensees. RESTRICTED RIGHTS LEGEND: Use, duplication, or disclosure by the government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227-7013 (October 1988) and FAR 52.227-19 Oune 1987). The product described in this manual may be protected by one or more U.s. patents, foreign patents, and/or pending applications. TRADEMARKS Sun Logo, Sun Microsystems, NeWS, and NFS are registered trademarks, and SunSoft, SunSoft logo, SunOS, SunView, Sun-2, Sun-3, Sun-4, XGL, SunPHIGS, SunGKS, and OpenWindows are trademarks of SunMicrosystems, Inc. licensed to SunSoft, Inc. UNIX and OPEN LOOK are registered trademarks of UNIX System Laboratories, Inc. PostScript is a registered trademark of Adobe Systems Incorporated. -
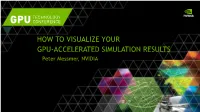
HOW to VISUALIZE YOUR GPU-ACCELERATED SIMULATION RESULTS Peter Messmer, NVIDIA
HOW TO VISUALIZE YOUR GPU-ACCELERATED SIMULATION RESULTS Peter Messmer, NVIDIA RANGE OF ANALYSIS AND VIZ TASKS . Analysis: Focus quantitative . Visualization: Focus qualitative . Monitoring, Steering TRADITIONAL HPC WORKFLOW Workstation Analysis, Setup Visualization Supercomputer Viz Cluster Dump, Checkpointing Visualization, Analysis File System TRADITIONAL WORKFLOW: CHALLENGES Lack of interactivity prevents “intuition” Workstation High-end viz Analysis, neglected due Setup Visualization to workflow complexity Supercomputer Viz Cluster Viz resources need I/O becomes main to scale with simulation Dump, simulation bottleneck Checkpointing Visualization, Analysis File System OUTLINE . Visualization applications . CUDA/OpenGL interop . Remote viz . Parallel viz . In-Situ viz High-level overview. Some parts platform dependent. Check with your sysadmin. VISUALIZATION APPLICATIONS NON-REPRESENTATIVE VIZ TOOLS SURVEY OF 25 HPC SITES Surveyed sites: LLNL LLNL- ORNL- AFRL- NASA- NERSC -OCF SCF LANL CCS DOD-ORC DSCR AFRL ARL ERDC NAVY MHPCC ORS CCAC NAS NASA-NCCS TACC CHPC RZG HLRN Julich CSCS CSC Hector Curie NON-REPRESENTATIVE VIZ TOOLS SURVEY OF 25 HPC SITES Surveyed sites: LLNL LLNL- ORNL- AFRL- NASA- NERSC -OCF SCF LANL CCS DOD-ORC DSCR AFRL ARL ERDC NAVY MHPCC ORS CCAC NAS NASA-NCCS TACC CHPC RZG HLRN Julich CSCS CSC Hector Curie VISIT . Scalar, vector and tensor field data features — Plots: contour, curve, mesh, pseudo-color, volume,.. — Operators: slice, iso-surface, threshold, binning,.. Quantitative and qualitative analysis/vis — Derived fields, dimension reduction, line-outs — Pick & query . Scalable architecture . Open source http://wci.llnl.gov/codes/visit/ VISIT . Cross-platform — Linux/Unix, OSX, Windows . Wide range of data formats — .vtk, .netcdf, .hdf5,.. Extensible — Plugin architecture . Embeddable . Python scriptable VISIT’S SCALABLE ARCHITECTURE . -

Securing Debian HOWTO
Securing Debian HOWTO Javier Fernández-Sanguino Peña <[email protected]> v1.92 6 noviembre 2001Tue Oct 23 00:59:57 CEST 2001 Abstract This document describes the process of securing and hardening the default Debian installation. It covers some of the common taks to setup a secure network environment using Debian GNU/Linux. Copyright Notice Copyright c 2001 Alexander Reelsen, Javier Fernández-Sanguino Peña Copyright c 2000 Alexander Reelsen however it is distributed under the terms of the GNU free documentation license. This document is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY. i Contents 1 Introduction 1 1.1 Download the HOWTO ................................... 1 1.2 Organizational Notes/Feedback ............................... 2 1.3 Prior knowledge ....................................... 2 1.4 Things that need to be written (TODO) ........................... 2 1.5 Changelog .......................................... 4 1.5.1 Version 1.92 .................................... 4 1.5.2 Version 1.91 .................................... 4 1.5.3 Version 1.9 ..................................... 4 1.5.4 Version 1.8 ..................................... 5 1.5.5 Version 1.7 ..................................... 5 1.5.6 Version 1.6 ..................................... 5 1.5.7 Version 1.5 ..................................... 6 1.5.8 Version 1.4 ..................................... 6 1.5.9 Version 1.3 ..................................... 6 1.5.10 Version 1.2 ..................................... 6 1.5.11 Version 1.1 ..................................... 6 1.5.12 Version 1.0 ..................................... 6 1.6 Credits ............................................ 7 2 Before you begin 9 2.1 What do you want this system for? ............................. 9 2.2 Be aware of general security problems ........................... 9 2.3 How does Debian handle security? ............................. 11 CONTENTS ii 3 Before and during the installation 13 3.1 Choose a BIOS password ................................. -

The Linux Gamers' HOWTO
The Linux Gamers’ HOWTO Peter Jay Salzman Frédéric Delanoy Copyright © 2001, 2002 Peter Jay Salzman Copyright © 2003, 2004 Peter Jay SalzmanFrédéric Delanoy 2004-11-13 v.1.0.6 Abstract The same questions get asked repeatedly on Linux related mailing lists and news groups. Many of them arise because people don’t know as much as they should about how things "work" on Linux, at least, as far as games go. Gaming can be a tough pursuit; it requires knowledge from an incredibly vast range of topics from compilers to libraries to system administration to networking to XFree86 administration ... you get the picture. Every aspect of your computer plays a role in gaming. It’s a demanding topic, but this fact is shadowed by the primary goal of gaming: to have fun and blow off some steam. This document is a stepping stone to get the most common problems resolved and to give people the knowledge to begin thinking intelligently about what is going on with their games. Just as with anything else on Linux, you need to know a little more about what’s going on behind the scenes with your system to be able to keep your games healthy or to diagnose and fix them when they’re not. 1. Administra If you have ideas, corrections or questions relating to this HOWTO, please email me. By receiving feedback on this howto (even if I don’t have the time to answer), you make me feel like I’m doing something useful. In turn, it motivates me to write more and add to this document. -
MX-18.3 Users Manual
MX-18.3 Users Manual v. 20190614 manual AT mxlinux DOT org Ctrl-F = Search this Manual Ctrl+Home = Return to top Table of Contents 1 Introduction................................................................................2 2 Installation..................................................................................8 3 Configuration...........................................................................37 4 Basic use..................................................................................93 5 Software Management...........................................................126 6 Advanced use.........................................................................141 7 Under the hood.......................................................................164 8 Glossary.................................................................................178 1 Introduction 1.1 About MX Linux MX Linux is a cooperative venture between the antiX and former MEPIS communities, using the best tools and talents from each distro and including work and ideas originally created by Warren Woodford. It is a midweight OS designed to combine an elegant and efficient desktop with simple configuration, high stability, solid performance and medium-sized footprint. Relying on the excellent upstream work by Linux and the open-source community, we deploy Xfce 4.12 as Desktop Environment on top of a Debian Stable base, drawing from the core antiX system. Ongoing backports and outside additions to our Repos serve to keep components current with developments.