Size Reduction of an Uwb Low-Profile Spiral Antenna
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Technical Assessment of Aperture-Coupled Antenna Technology
Running head: APERTURE-COUPLED ANTENNA TECHNOLOGY 1 A Technical Assessment of Aperture-coupled Antenna Technology Justin Obenchain A Senior Thesis submitted in partial fulfillment of the requirements for graduation in the Honors Program Liberty University Spring 2014 APERTURE-COUPLED ANTENNA TECHNOLOGY 2 Acceptance of Senior Honors Thesis This Senior Honors Thesis is accepted in partial fulfillment of the requirements for graduation from the Honors Program of Liberty University. ______________________________ Carl Pettiford, Ph.D. Thesis Chair ______________________________ Kyung K. Bae, Ph.D. Committee Member ______________________________ James Cook, Ph.D. Committee Member ______________________________ Brenda Ayres, Ph.D. Honors Director ______________________________ Date APERTURE-COUPLED ANTENNA TECHNOLOGY 3 Abstract Aperture coupling refers to a method of construction for patch antennas, which are specific types of microstrip antennas. These antennas are used in a variety of applications including cellular telephones, military radios, and other communications devices. The purpose of this thesis is to assess the benefits and drawbacks of aperture- coupled antenna technology. To develop a successful analysis of the patch antenna construction technique known as aperture coupling, this assessment begins by examining basic antenna theory and patch antenna design. After uncovering some of the fundamental principles that govern aperture-coupled antenna technology, a hypothesis is created and assessed based on the positive and negative aspects -

Radiometry and the Friis Transmission Equation Joseph A
Radiometry and the Friis transmission equation Joseph A. Shaw Citation: Am. J. Phys. 81, 33 (2013); doi: 10.1119/1.4755780 View online: http://dx.doi.org/10.1119/1.4755780 View Table of Contents: http://ajp.aapt.org/resource/1/AJPIAS/v81/i1 Published by the American Association of Physics Teachers Related Articles The reciprocal relation of mutual inductance in a coupled circuit system Am. J. Phys. 80, 840 (2012) Teaching solar cell I-V characteristics using SPICE Am. J. Phys. 79, 1232 (2011) A digital oscilloscope setup for the measurement of a transistor’s characteristic curves Am. J. Phys. 78, 1425 (2010) A low cost, modular, and physiologically inspired electronic neuron Am. J. Phys. 78, 1297 (2010) Spreadsheet lock-in amplifier Am. J. Phys. 78, 1227 (2010) Additional information on Am. J. Phys. Journal Homepage: http://ajp.aapt.org/ Journal Information: http://ajp.aapt.org/about/about_the_journal Top downloads: http://ajp.aapt.org/most_downloaded Information for Authors: http://ajp.dickinson.edu/Contributors/contGenInfo.html Downloaded 07 Jan 2013 to 153.90.120.11. Redistribution subject to AAPT license or copyright; see http://ajp.aapt.org/authors/copyright_permission Radiometry and the Friis transmission equation Joseph A. Shaw Department of Electrical & Computer Engineering, Montana State University, Bozeman, Montana 59717 (Received 1 July 2011; accepted 13 September 2012) To more effectively tailor courses involving antennas, wireless communications, optics, and applied electromagnetics to a mixed audience of engineering and physics students, the Friis transmission equation—which quantifies the power received in a free-space communication link—is developed from principles of optical radiometry and scalar diffraction. -
Path Loss and Shadowing 2017
Path-loss and Shadowing (Large-scale Fading) PROF. MICHAEL TSAI 2017/10/23 Friis Formula TX Antenna RX Antenna �"�"�- × � ⇒ � = � - 0 4��+ EIRP=�"�" % Power spatial density &' 1 × 4��+ 2 � � � � = � � - Antenna Aperture � 4��+ • Antenna Aperture=Effective Area �� • Isotropic Antenna’s effective area � ≐ �,��� �� • Isotropic Antenna’s Gain=1 �� • � = � �� � � � � �� � � � • Friis Formula becomes: � = � � � = � � � � ��� � ���� 3 � � � �� Friis Formula � = � � � � ��� � �� • is often referred as “Free-Space Path Loss” (FSPL) ��� � • Only valid when d is in the “far-field” of the transmitting antenna • Far-field: when � > ��, Fraunhofer distance ��� • � = , and it must satisfies � ≫ � and � ≫ � � � � � • D: Largest physical linear dimension of the antenna • �: Wavelength • We often choose a �� in the far-field region, and smaller than any practical distance used in the system � � • Then we have � � = � � � � � � � 4 Received Signal after Free-Space Path Loss phase difference due to propagation distance ���� � ������� − � � � = �� �N � ��� ���� � ��� � Free-Space Path Loss Carrier (sinusoid) Complex envelope 5 Example: Far-field Distance • Find the far-field distance of an antenna with maximum dimension of 1m and operating freQuency of 900 MHz (GSM 900) • Ans: • Largest dimension of antenna: D=1m • Operating FreQuency: f=900 MHz � �×��� • Wavelength: � = = = �. �� � ���×��� ��� � • � = = = �. �� (m) � � �.�� 6 Example: FSPL • If a transmitter produces 50 watts of power, express the transmit power in units of (a) dBm and (b) dBW. • If 50 watts -

Exp-1: Understand the Pathloss Prediction Formula
Exp-1: Understand the pathloss prediction formula. Aim To understand the pathloss prediction formula Objectives 1. Calculation of received signal strength as a function of distance of separation between transmitter and receiver. 2. To understand the impact of the following parameters on received signal strength. (a) Transmitter Power (b) Path loss exponent, (c) Carrier frequency, (d) Receiver antenna height, (e) Transmitter antenna height. 1 Theory for Experiment 1:-Understand the pathloss prediction formula. The design of a communication system involves selection of values for several parameters. One of the important parameter is the transmit power. Higher transmit power ensures large allowable separation distance between the transmitter (Tx) and receiver(Rx). Of course the loss in signal power per unit distance depends on the properties of the medium. In case of wireless communication on one hand it is desired to have a very large coverage (large allowable separation between Txand Rx) on the other hand it is also desired that co-channel interference be as low as possible.An understanding of the large scale propagation effects is very important for design of suitable communication system. In terrestrial mobile communication system, electro-magnetic wave propagation is affected by reflection, diffraction and scattering. These lead to dynamic variation of signal strength as a function of time, frequency, distance of separation, antenna height, antenna configuration, local scattering environment etc. Propagation models are necessary in order to predict the received signal strength for a given set of parameters as mentioned above. These models can be broadly considered under:- • Large scale Fading Model. • Small Scale Fading Model. -

Low-Profile Wideband Antennas Based on Tightly Coupled Dipole
Low-Profile Wideband Antennas Based on Tightly Coupled Dipole and Patch Elements Dissertation Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Erdinc Irci, B.S., M.S. Graduate Program in Electrical and Computer Engineering The Ohio State University 2011 Dissertation Committee: John L. Volakis, Advisor Kubilay Sertel, Co-advisor Robert J. Burkholder Fernando L. Teixeira c Copyright by Erdinc Irci 2011 Abstract There is strong interest to combine many antenna functionalities within a single, wideband aperture. However, size restrictions and conformal installation requirements are major obstacles to this goal (in terms of gain and bandwidth). Of particular importance is bandwidth; which, as is well known, decreases when the antenna is placed closer to the ground plane. Hence, recent efforts on EBG and AMC ground planes were aimed at mitigating this deterioration for low-profile antennas. In this dissertation, we propose a new class of tightly coupled arrays (TCAs) which exhibit substantially broader bandwidth than a single patch antenna of the same size. The enhancement is due to the cancellation of the ground plane inductance by the capacitance of the TCA aperture. This concept of reactive impedance cancellation was motivated by the ultrawideband (UWB) current sheet array (CSA) introduced by Munk in 2003. We demonstrate that as broad as 7:1 UWB operation can be achieved for an aperture as thin as λ/17 at the lowest frequency. This is a 40% larger wideband performance and 35% thinner profile as compared to the CSA. Much of the dissertation’s focus is on adapting the conformal TCA concept to small and very low-profile finite arrays. -

Radiation Hazard Analysis KVH Industries Carlsbad, CA
Radiation Hazard Analysis KVH Industries Carlsbad, CA This analysis predicts the radiation levels around a proposed earth station complex, comprised of one (reflector) type antennas. This report is developed in accordance with the prediction methods contained in OET Bulletin No. 65, Evaluating Compliance with FCC Guidelines for Human Exposure to Radio Frequency Electromagnetic Fields, Edition 97-01, pp 26-30. The maximum level of non-ionizing radiation to which employees may be exposed is limited to a power density level of 5 milliwatts per square centimeter (5 mW/cm2) averaged over any 6 minute period in a controlled environment and the maximum level of non-ionizing radiation to which the general public is exposed is limited to a power density level of 1 milliwatt per square centimeter (1 mW/cm2) averaged over any 30 minute period in a uncontrolled environment. Note that the worse-case radiation hazards exist along the beam axis. Under normal circumstances, it is highly unlikely that the antenna axis will be aligned with any occupied area since that would represent a blockage to the desired signals, thus rendering the link unusable. Earth Station Technical Parameter Table Antenna Actual Diameter 1 meters Antenna Surface Area 0.8 sq. meters Antenna Isotropic Gain 34.5 dBi Number of Identical Adjacent Antennas 1 Nominal Antenna Efficiency (ε) 67.50% Nominal Frequency 6.138 GHz Nominal Wavelength (λ) 0.0489 meters Maximum Transmit Power / Carrier 22.0 Watts Number of Carriers 1 Total Transmit Power 22.0 Watts W/G Loss from Transmitter to Feed 1.0 dB Total Feed Input Power 17.48 Watts Near Field Limit Rnf = D²/4λ =5.12 meters Far Field Limit Rff = 0.6 D²/λ = 12.28 meters Transition Region Rnf to Rff In the following sections, the power density in the above regions, as well as other critically important areas will be calculated and evaluated. -

1.Effective Aperture of Antenna Directivity Bounding and Its
International Journal of Advanced Trends in Engineering, Science and Technology (IJATEST:2456-1126) Vol.3.Issue.5,September.2018 Effective Aperture of Antenna Directivity Bounding and Its Radiation Aperture MD. Javeed Ahammed 1, Dr. R.P. Singh2, Dr. M. Satya Sai Ram3 1.Research Scholar, ECE Department, Sri Satya Sai University of Technology and Medical Science, Sehore, Bhopal, Madhya Pradesh, India. E-mail: [email protected] 2. Vice- Chancellor, Sri Satya Sai University of Technology and Medical Science, Sehore, Bhopal, Madhya Pradesh, India. 3. HOD, ECE, Chalapathi Institute of Engineering and Technology, Chalapathi Nagar, Guntur, Andhra Pradesh, India. Abstract: In this paper, among the earliest type of antennas in production was aperture type. These antennas were rigid and consisted of a parabolic, paraboloidal, cylindrical, or spherical shape. A major limitation of this type of antenna stems from the fact they could only give one particular radiation pattern, and if one wanted to scan the signal from one point to another, then the whole structure had to be moved which meant the satellite had to be realigned. This major shortcoming led to the development of the more costly phased array technology and other technologies where beam scanning was exploited. The aperture is defined as the area, oriented perpendicular to the direction of an incoming radio wave, which would intercept the same amount of power from that wave as is produced by the antenna receiving it. At any point, a beam of radio waves has an irradiance or power flux density which is the amount of radio power passing through a unit area of one square meter. -

ANTENNA INTRODUCTION / BASICS Rules of Thumb
ANTENNA INTRODUCTION / BASICS Rules of Thumb: 1. The Gain of an antenna with losses is given by: Where BW are the elev & az another is: 2 and N 4B0A 0 ' Efficiency beamwidths in degrees. G • Where For approximating an antenna pattern with: 2 A ' Physical aperture area ' X 0 8 G (1) A rectangle; X'41253,0 '0.7 ' BW BW typical 8 wavelength N 2 ' ' (2) An ellipsoid; X 52525,0typical 0.55 2. Gain of rectangular X-Band Aperture G = 1.4 LW Where: Length (L) and Width (W) are in cm 3. Gain of Circular X-Band Aperture 3 dB Beamwidth G = d20 Where: d = antenna diameter in cm 0 = aperture efficiency .5 power 4. Gain of an isotropic antenna radiating in a uniform spherical pattern is one (0 dB). .707 voltage 5. Antenna with a 20 degree beamwidth has a 20 dB gain. 6. 3 dB beamwidth is approximately equal to the angle from the peak of the power to Peak power Antenna the first null (see figure at right). to first null Radiation Pattern 708 7. Parabolic Antenna Beamwidth: BW ' d Where: BW = antenna beamwidth; 8 = wavelength; d = antenna diameter. The antenna equations which follow relate to Figure 1 as a typical antenna. In Figure 1, BWN is the azimuth beamwidth and BW2 is the elevation beamwidth. Beamwidth is normally measured at the half-power or -3 dB point of the main lobe unless otherwise specified. See Glossary. The gain or directivity of an antenna is the ratio of the radiation BWN BW2 intensity in a given direction to the radiation intensity averaged over Azimuth and Elevation Beamwidths all directions. -

Lecture 28 Different Types of Antennas–Heuristics
Lecture 28 Different Types of Antennas{Heuristics 28.1 Types of Antennas There are different types of antennas for different applications [128]. We will discuss their functions heuristically in the following discussions. 28.1.1 Resonance Tunneling in Antenna A simple antenna like a short dipole behaves like a Hertzian dipole with an effective length. A short dipole has an input impedance resembling that of a capacitor. Hence, it is difficult to drive current into the antenna unless other elements are added. Hertz used two metallic spheres to increase the current flow. When a large current flows on the stem of the Hertzian dipole, the stem starts to act like inductor. Thus, the end cap capacitances and the stem inductance together can act like a resonator enhancing the current flow on the antenna. Some antennas are deliberately built to resonate with its structure to enhance its radiation. A half-wave dipole is such an antenna as shown in Figure 28.1 [124]. One can think that these antennas are using resonance tunneling to enhance their radiation efficiencies. A half-wave dipole can also be thought of as a flared open transmission line in order to make it radiate. It can be gradually morphed from a quarter-wavelength transmission line as shown in Figure 28.1. A transmission is a poor radiator, because the electromagnetic energy is trapped between two pieces of metal. But a flared transmission line can radiate its field to free space. The dipole antenna, though a simple device, has been extensively studied by King [129]. He has reputed to have produced over 100 PhD students studying the dipole antenna. -

Medium Power, Compact Periodic Spiral Antenna Jonathan O'brien University of South Florida, [email protected]
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School January 2013 Medium Power, Compact Periodic Spiral Antenna Jonathan O'brien University of South Florida, [email protected] Follow this and additional works at: http://scholarcommons.usf.edu/etd Part of the Electrical and Computer Engineering Commons Scholar Commons Citation O'brien, Jonathan, "Medium Power, Compact Periodic Spiral Antenna" (2013). Graduate Theses and Dissertations. http://scholarcommons.usf.edu/etd/4926 This Thesis is brought to you for free and open access by the Graduate School at Scholar Commons. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. Medium Power, Compact Periodic Spiral Antenna by Jonathan M. O’Brien A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering Department of Electrical Engineering College of Engineering University of South Florida Major Professor: Thomas M. Weller, Ph.D. Gokhan Mumcu, Ph.D. Huseyin Arslan, Ph.D. John Grandfield, B.S.E.E. Date of Approval: November 8, 2013 Keywords: Three Dimensional Miniaturization, Ultra-Wideband Antennas, Thermal Modeling, Miniaturization Techniques, Loop Antenna Copyright © 2013, Jonathan M. O’Brien Dedication To my family My mother who never let me quit at anything My father who taught me that life isn’t a destination Joey who made me understand more about life than I could ever explain My brother for being my best competitor in school My best sister who can always make me laugh Acknowledgments Words cannot express the gratitude and respect I have for my advisor, Prof. -

Highlights of Antenna History
~~ IEEE COMMUNICATIONS MAGAZINE HlOHLlOHTS OF ANTENNA HISTORY JACK RAMSAY A look at the major events in the development of antennas. wires. Antenna systems similar to Edison’s were used by A. E. Dolbear in 1882 when he successfully and somewhat mysteriously succeeded in transmitting code and even speech to significant ranges, allegedly by groundconduction. NINETEENTH CENTURY WIRE ANTENNAS However, in one experiment he actually flew the first kite T is not surprising that wire antennas were inaugurated antenna.About the same time, the Irish professor, in 1842 by theinventor of wire telegraphy,Joseph C. F. Fitzgerald, calculated that a loop would radiate and that Henry, Professor’ of Natural Philosophy at Princeton, a capacitance connected to a resistor would radiate at VHF NJ. By “throwing a spark” to a circuit of wire in an (undoubtedly due to radiation from the wire connecting leads). Iupper room,Henry found that thecurrent received in a In Hertz launched,processed, and received radio 1887 H. parallel circuit in a cellar 30 ft below codd.magnetize needies. waves systematically. He used a balanced or dipole antenna With a vertical wire from his study to the roof of his house, he attachedto ’ an induction coilas a transmitter, and a detected lightning flashes 7-8 mi distant. Henry also sparked one-turn loop (rectangular) containing a sparkgap as a to a telegraph wire running from his laboratory to his house, receiver. He obtained “sympathetic resonance” by tuning the and magnetized needles in a coil attached to a parailel wire dipole with sliding spheres, and the loop by adding series 220 ft away. -
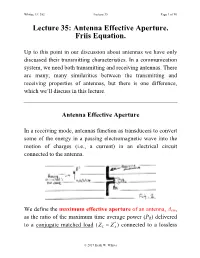
Lecture 35: Antenna Effective Aperture. Friis Equation
Whites, EE 382 Lecture 35 Page 1 of 10 Lecture 35: Antenna Effective Aperture. Friis Equation. Up to this point in our discussion about antennas we have only discussed their transmitting characteristics. In a communication system, we need both transmitting and receiving antennas. There are many, many similarities between the transmitting and receiving properties of antennas, but there is one difference, which we’ll discuss in this lecture. Antenna Effective Aperture In a receiving mode, antennas function as transducers to convert some of the energy in a passing electromagnetic wave into the motion of charges (i.e., a current) in an electrical circuit connected to the antenna. We define the maximum effective aperture of an antenna, Aem, as the ratio of the maximum time average power (PR) delivered * to a conjugate matched load (ZL Z A ) connected to a lossless © 2017 Keith W. Whites Whites, EE 382 Lecture 35 Page 2 of 10 receiving antenna to the time average power density of an incident EM wave (linearly polarized UPW) illuminating the i antenna, Sav : PR 2 Aem i [m ] (1) Sav (The adjective “maximum” in maximum effective aperture indicates the assumption there are no losses in the antenna.) Alternatively, from (1) i PRemav AS which states that the time average power delivered to a conjugate matched load connected to a lossless receiving antenna equals the power flow through an area equal to Aem of an incident UPW. It can be shown (through a rather involved derivation found in many introductory antenna texts) that for any antenna, the maximum directivity D is related to the maximum effective aperture as 4 DA (2) 2 em In the case that there are losses in the antenna, the power delivered to the matched load is further reduced to the fraction er (i.e., the radiation efficiency) of what would have been received in the lossless situation according to Aerem eA (3) where Ae is the effective aperture of the receiving antenna.