Wing Shape and Flight Behaviour in Butterflies (Lepidoptera: Papilionoidea and Hesperioidea): a Preliminary Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lepidoptera: Papilionoidea) Q ⇑ Marianne Espeland A,B, , Jason P.W
Molecular Phylogenetics and Evolution 93 (2015) 296–306 Contents lists available at ScienceDirect Molecular Phylogenetics and Evolution journal homepage: www.elsevier.com/locate/ympev Ancient Neotropical origin and recent recolonisation: Phylogeny, biogeography and diversification of the Riodinidae (Lepidoptera: Papilionoidea) q ⇑ Marianne Espeland a,b, , Jason P.W. Hall c, Philip J. DeVries d, David C. Lees e, Mark Cornwall a, Yu-Feng Hsu f, Li-Wei Wu g, Dana L. Campbell a,h, Gerard Talavera a,i,j, Roger Vila i, Shayla Salzman a, Sophie Ruehr k, David J. Lohman l, Naomi E. Pierce a a Museum of Comparative Zoology and Department of Organismic and Evolutionary Biology, Harvard University, 26 Oxford Street, Cambridge, MA 02138, USA b McGuire Center for Lepidoptera and Biodiversity, Florida Museum of Natural History, University of Florida, Powell Hall, 2315 Hull Road, Gainesville, FL 32611, USA c Department of Systematic Biology-Entomology, National Museum of Natural History, Smithsonian Institution, Washington, DC 20560-127, USA d Department of Biological Sciences, University of New Orleans, 2000 Lake Shore Drive, New Orleans, LA 70148, USA e Department of Zoology, University of Cambridge, Cambridge CB2 3EJ, UK f Department of Life Science, National Taiwan Normal University, Taipei, Taiwan g The Experimental Forest, College of Bio-Resources and Agriculture, National Taiwan University, Nantou, Taiwan h Division of Biological Sciences, School of Science, Technology, Engineering & Mathematics, University of Washington Bothell, Box 358500, 18115 Campus Way NE, Bothell, WA 98011-8246, USA i Institut de Biologia Evolutiva (CSIC-UPF), Pg. Marítim de la Barceloneta 37, 08003 Barcelona, Spain j Faculty of Biology & Soil Science, St. -

Butterfly Wing Colors: Glass Scales of Graphium Sarpedon Cause Polarized Iridescence and Enhance Blue/Green Pigment Coloration of the Wing Membrane
1731 The Journal of Experimental Biology 213, 1731-1739 © 2010. Published by The Company of Biologists Ltd doi:10.1242/jeb.041434 Butterfly wing colors: glass scales of Graphium sarpedon cause polarized iridescence and enhance blue/green pigment coloration of the wing membrane Doekele G. Stavenga1,*, Marco A. Giraldo1,2 and Hein L. Leertouwer1 1Department of Neurobiophysics, University of Groningen, Physics-Chemistry Building, Nijenborgh 4, Groningen, 9747 AG, The Netherlands and 2Institute of Physics, University of Antioquia, Medellín, AA 1226, Colombia *Author for correspondence ([email protected]) Accepted 4 February 2010 SUMMARY The wings of the swordtail butterfly Graphium sarpedon nipponum contain the bile pigment sarpedobilin, which causes blue/green colored wing patches. Locally the bile pigment is combined with the strongly blue-absorbing carotenoid lutein, resulting in green wing patches and thus improving camouflage. In the dorsal forewings, the colored patches lack the usual wing scales, but instead have bristles. We have found that on the ventral side most of these patches have very transparent scales that enhance, by reflection, the wing coloration when illuminated from the dorsal side. These glass scales furthermore create a strongly polarized iridescence when illuminated by obliquely incident light from the ventral side, presumably for intraspecific signaling. A few ventral forewing patches have diffusely scattering, white scales that also enhance the blue/green wing coloration when observed from the dorsal side. Key words: imaging scatterometry, sarpedobilin, bile pigments, lutein. INTRODUCTION matte green color of the scales results; a similar scale organization Graphium is a genus of swallowtail butterflies, known as swordtails is found in a related lycaenid, Cyanophrys remus (Kertesz et al., or kite swallowtails, from Australasian and Oriental regions. -
Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-Related Effects?
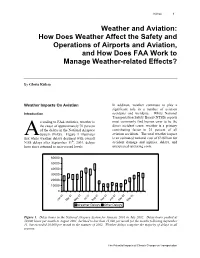
Kulesa 1 Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-related Effects? By Gloria Kulesa Weather Impacts On Aviation In addition, weather continues to play a significant role in a number of aviation Introduction accidents and incidents. While National Transportation Safety Board (NTSB) reports ccording to FAA statistics, weather is most commonly find human error to be the the cause of approximately 70 percent direct accident cause, weather is a primary of the delays in the National Airspace contributing factor in 23 percent of all System (NAS). Figure 1 illustrates aviation accidents. The total weather impact that while weather delays declined with overall is an estimated national cost of $3 billion for NAS delays after September 11th, 2001, delays accident damage and injuries, delays, and have since returned to near-record levels. unexpected operating costs. 60000 50000 40000 30000 20000 10000 0 1 01 01 0 01 02 02 ul an 01 J ep an 02 J Mar May S Nov 01 J Mar May Weather Delays Other Delays Figure 1. Delay hours in the National Airspace System for January 2001 to July 2002. Delay hours peaked at 50,000 hours per month in August 2001, declined to less than 15,000 per month for the months following September 11, but exceeded 30,000 per month in the summer of 2002. Weather delays comprise the majority of delays in all seasons. The Potential Impacts of Climate Change on Transportation 2 Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-related Effects? Thunderstorms and Other Convective In-Flight Icing. -

Title Butterflies Collected in and Around Lambir Hills National Park
Butterflies collected in and around Lambir Hills National Park, Title Sarawak, Malaysia in Borneo ITIOKA, Takao; YAMAMOTO, Takuji; TZUCHIYA, Taizo; OKUBO, Tadahiro; YAGO, Masaya; SEKI, Yasuo; Author(s) OHSHIMA, Yasuhiro; KATSUYAMA, Raiichiro; CHIBA, Hideyuki; YATA, Osamu Contributions from the Biological Laboratory, Kyoto Citation University (2009), 30(1): 25-68 Issue Date 2009-03-27 URL http://hdl.handle.net/2433/156421 Right Type Departmental Bulletin Paper Textversion publisher Kyoto University Contn bioL Lab, Kyoto Univ., Vot. 30, pp. 25-68 March 2009 Butterflies collected in and around Lambir Hills National ParK SarawaK Malaysia in Borneo Takao ITioKA, Takuji YAMAMo'rD, Taizo TzucHiyA, Tadahiro OKuBo, Masaya YAGo, Yasuo SEKi, Yasuhiro OHsHIMA, Raiichiro KATsuyAMA, Hideyuki CHiBA and Osamu YATA ABSTRACT Data ofbutterflies collected in Lambir Hills National Patk, Sarawak, Malaysia in Borneo, and in ks surrounding areas since 1996 are presented. In addition, the data ofobservation for several species wimessed but not caught are also presented. In tota1, 347 butterfly species are listed with biological information (habitat etc.) when available. KEY WORDS Lepidoptera! inventory1 tropical rainforesti species diversity1 species richness! insect fauna Introduction The primary lowland forests in the Southeast Asian (SEA) tropics are characterized by the extremely species-rich biodiversity (Whitmore 1998). Arthropod assemblages comprise the main part of the biodiversity in tropical rainforests (Erwin 1982, Wilson 1992). Many inventory studies have been done focusing on various arthropod taxa to reveal the species-richness of arthropod assemblages in SEA tropical rainforests (e.g. Holloway & lntachat 2003). The butterfly is one of the most studied taxonomic groups in arthropods in the SEA region; the accumulated information on the taxonomy and geographic distribution were organized by Tsukada & Nishiyama (1980), Yata & Morishita (1981), Aoki et al. -

9 2013, No.1136
2013, No.1136 8 LAMPIRAN I PERATURAN MENTERI PERDAGANGAN REPUBLIK INDONESIA NOMOR 50/M-DAG/PER/9/2013 TENTANG KETENTUAN EKSPOR TUMBUHAN ALAM DAN SATWA LIAR YANG TIDAK DILINDUNGI UNDANG-UNDANG DAN TERMASUK DALAM DAFTAR CITES JENIS TUMBUHAN ALAM DAN SATWA LIAR YANG TIDAK DILINDUNGI UNDANG-UNDANG DAN TERMASUK DALAM DAFTAR CITES No. Pos Tarif/HS Uraian Barang Appendix I. Binatang Hidup Lainnya. - Binatang Menyusui (Mamalia) ex. 0106.11.00.00 Primata dari jenis : - Macaca fascicularis - Macaca nemestrina ex. 0106.19.00.00 Binatang menyusui lain-lain dari jenis: - Pteropus alecto - Pteropus vampyrus ex. 0106.20.00.00 Binatang melata (termasuk ular dan penyu) dari jenis: · Ular (Snakes) - Apodora papuana / Liasis olivaceus papuanus - Candoia aspera - Candoia carinata - Leiopython albertisi - Liasis fuscus - Liasis macklotti macklotti - Morelia amethistina - Morelia boeleni - Morelia spilota variegata - Naja sputatrix - Ophiophagus hannah - Ptyas mucosus - Python curtus - Python brongersmai - Python breitensteini - Python reticulates www.djpp.kemenkumham.go.id 9 2013, No.1136 No. Pos Tarif/HS Uraian Barang · Biawak (Monitors) - Varanus beccari - Varanus doreanus - Varanus dumerili - Varanus jobiensis - Varanus rudicollis - Varanus salvadori - Varanus salvator · Kura-Kura (Turtles) - Amyda cartilaginea - Calllagur borneoensis - Carettochelys insculpta - Chelodina mccordi - Cuora amboinensis - Heosemys spinosa - Indotestudo forsteni - Leucocephalon (Geoemyda) yuwonoi - Malayemys subtrijuga - Manouria emys - Notochelys platynota - Pelochelys bibroni -

Lepidoptera of North America 5
Lepidoptera of North America 5. Contributions to the Knowledge of Southern West Virginia Lepidoptera Contributions of the C.P. Gillette Museum of Arthropod Diversity Colorado State University Lepidoptera of North America 5. Contributions to the Knowledge of Southern West Virginia Lepidoptera by Valerio Albu, 1411 E. Sweetbriar Drive Fresno, CA 93720 and Eric Metzler, 1241 Kildale Square North Columbus, OH 43229 April 30, 2004 Contributions of the C.P. Gillette Museum of Arthropod Diversity Colorado State University Cover illustration: Blueberry Sphinx (Paonias astylus (Drury)], an eastern endemic. Photo by Valeriu Albu. ISBN 1084-8819 This publication and others in the series may be ordered from the C.P. Gillette Museum of Arthropod Diversity, Department of Bioagricultural Sciences and Pest Management Colorado State University, Fort Collins, CO 80523 Abstract A list of 1531 species ofLepidoptera is presented, collected over 15 years (1988 to 2002), in eleven southern West Virginia counties. A variety of collecting methods was used, including netting, light attracting, light trapping and pheromone trapping. The specimens were identified by the currently available pictorial sources and determination keys. Many were also sent to specialists for confirmation or identification. The majority of the data was from Kanawha County, reflecting the area of more intensive sampling effort by the senior author. This imbalance of data between Kanawha County and other counties should even out with further sampling of the area. Key Words: Appalachian Mountains, -

An Inordinate Disdain for Beetles
An Inordinate Disdain for Beetles: Imagining the Insect in Colonial Aotearoa A Thesis submitted in partial fulfillment of the requirements for the Degree of Masters of Arts in English By Lillian Duval University of Canterbury August 2020 Table of Contents: TABLE OF CONTENTS: ................................................................................................................................. 2 TABLE OF FIGURES ..................................................................................................................................... 3 ACKNOWLEDGEMENT ................................................................................................................................ 6 ABSTRACT .................................................................................................................................................. 7 INTRODUCTION: INSECTOCENTRISM..................................................................................................................................... 8 LANGUAGE ........................................................................................................................................................... 11 ALICE AND THE GNAT IN CONTEXT ............................................................................................................................ 17 FOCUS OF THIS RESEARCH ....................................................................................................................................... 20 CHAPTER ONE: FRONTIER ENTOMOLOGY AND THE -

Extreme Spectral Richness in the Eye of the Common Bluebottle Butterfly
ORIGINAL RESEARCH published: 08 March 2016 doi: 10.3389/fevo.2016.00018 Extreme Spectral Richness in the Eye of the Common Bluebottle Butterfly, Graphium sarpedon Pei-Ju Chen 1, 2, Hiroko Awata 1, Atsuko Matsushita 1, En-Cheng Yang 2 and Kentaro Arikawa 1* 1 Department of Evolutionary Studies of Biosystems, SOKENDAI (The Graduate University for Advanced Studies), Hayama, Japan, 2 Department of Entomology, National Taiwan University, Taipei, Taiwan Butterfly eyes are furnished with a variety of photoreceptors of different spectral sensitivities often in species-specific manner. We have conducted an extensive comparative study to address the question of how their spectrally complex retinas evolved. Here we investigated the structure and function of the eye of the common bluebottle butterfly (Graphium sarpedon), using electrophysiological, anatomical, and molecular approaches. Intracellular electrophysiology revealed that the eye contains photoreceptors of 15 distinct spectral sensitivities. These can be divided into six spectral receptor classes: ultraviolet—(UV), violet— (V), blue—(B), blue–green—(BG), green—(G), Edited by: and red—(R) sensitive. The B, G, and R classes respectively contain three, four, and five Wayne Iwan Lee Davies, University of Western Australia, subclasses. Fifteen is the record number of spectral receptors so far reported in a single Australia insect eye. We localized these receptors by injecting dye into individual photoreceptors Reviewed by: after recording their spectral sensitivities. We thus found that four of them are confined Yuri Ogawa, to the dorsal region, eight to the ventral, and three exist throughout the eye; the ventral The University of Western Australia, Australia eye region is spectrally richer than the dorsal region. -

Phylogenetic Relationships and Historical Biogeography of Tribes and Genera in the Subfamily Nymphalinae (Lepidoptera: Nymphalidae)
Blackwell Science, LtdOxford, UKBIJBiological Journal of the Linnean Society 0024-4066The Linnean Society of London, 2005? 2005 862 227251 Original Article PHYLOGENY OF NYMPHALINAE N. WAHLBERG ET AL Biological Journal of the Linnean Society, 2005, 86, 227–251. With 5 figures . Phylogenetic relationships and historical biogeography of tribes and genera in the subfamily Nymphalinae (Lepidoptera: Nymphalidae) NIKLAS WAHLBERG1*, ANDREW V. Z. BROWER2 and SÖREN NYLIN1 1Department of Zoology, Stockholm University, S-106 91 Stockholm, Sweden 2Department of Zoology, Oregon State University, Corvallis, Oregon 97331–2907, USA Received 10 January 2004; accepted for publication 12 November 2004 We infer for the first time the phylogenetic relationships of genera and tribes in the ecologically and evolutionarily well-studied subfamily Nymphalinae using DNA sequence data from three genes: 1450 bp of cytochrome oxidase subunit I (COI) (in the mitochondrial genome), 1077 bp of elongation factor 1-alpha (EF1-a) and 400–403 bp of wing- less (both in the nuclear genome). We explore the influence of each gene region on the support given to each node of the most parsimonious tree derived from a combined analysis of all three genes using Partitioned Bremer Support. We also explore the influence of assuming equal weights for all characters in the combined analysis by investigating the stability of clades to different transition/transversion weighting schemes. We find many strongly supported and stable clades in the Nymphalinae. We are also able to identify ‘rogue’ -

Water Rocket Booklet
A guide to building and understanding the physics of Water Rockets Version 1.02 June 2007 Warning: Water Rocketeering is a potentially dangerous activity and individuals following the instructions herein do so at their own risk. Exclusion of liability: NPL Management Limited cannot exclude the risk of accident and, for this reason, hereby exclude, to the maximum extent permissible by law, any and all liability for loss, damage, or harm, howsoever arising. Contents WATER ROCKETS SECTION 1: WHAT IS A WATER ROCKET? 1 SECTION 3: LAUNCHERS 9 SECTION 4: OPTIMISING ROCKET DESIGN 15 SECTION 5: TESTING YOUR ROCKET 24 SECTION 6: PHYSICS OF A WATER ROCKET 29 SECTION 7: COMPUTER SIMULATION 32 SECTION 8: SAFETY 37 SECTION 9: USEFUL INFORMATION 38 SECTION 10: SOME INTERESTING DETAILS 40 Copyright and Reproduction Michael de Podesta hereby asserts his right to be identified as author of this booklet. The copyright of this booklet is owned by NPL. Michael de Podesta and NPL grant permission to reproduce the booklet in part or in whole for any not-for-profit educational activity, but you must acknowledge both the author and the copyright owner. Acknowledgements I began writing this guide to support people entering the NPL Water Rocket Competition. So the first acknowledgement has to be to Dr. Nick McCormick, who founded the competition many years ago and who is still the driving force behind the activity at NPL. Nick’s instinct for physics and fun has brought pleasure to thousands. The inspiration to actually begin writing this document instead of just saying that someone ought to do it, was provided by Andrew Hanson. -

45 Colonization and Strategic Stratification of Butterfly
J. biodivers. conserv. bioresour. manag. 3(1), 2017 COLONIZATION AND STRATEGIC STRATIFICATION OF BUTTERFLY Pachliopta aristolochiae (LEPIDOPTERA: PAPILIONIDAE) AND ITS RELATIONSHIP WITH THE HOST PLANT Aristolochia indica (PIPERALES: ARISTOLOCHIACEAE) Alam, S., M. A. Bashar, U. Aich, S. Akand and S. Rahman Environmental Biology and Biodiversity Laboratory (EBBL), Department of Zoology, University of Dhaka, Dhaka-1000, Bangladesh Abstract Colonization experiment for the butterfly Pachliopta aristolochiae (Fabricius, 1775) (Lepidoptera: Papilionidae) was carried out in the Zoological Garden, Curzon Hall, University of Dhaka and Bhawal national park, Gazipur from 2010 to 2011, and butterfly host-plants and nectar-plants were identified for this purpose. The field observations and identification confirmed that the host plant species Aristolochia indica is a creeper plant. A. indica was cultivated for the butterfly oviposition behaviour and to continue developmental stages. The oviposition behaviour of gravid female, hatching, feeding and moulting behaviour of the four larval instars, and pupation behaviour of A. indica were recorded. Both laboratory and field observations revealed that while there was availability of food, 1st and 2nd instar larvae preferred tender leaves, whereas the 3rd and 4th instar larvae fed both on young and mature leaves. However, mature larvae were also observed to feed on the stems, flower and fruits of the host-plant in absence of suitable succulent leaves. The feeding time was recorded for each larval instars and it was relatively low for 1st and 2nd instar larvae, remarkably higher in 3rd instar larvae and highest in the case of ultimate and penultimate larval instars. The egg, larval and pupal mortalities were counted during the study period. -

Washington Butterfly Association Common Butterflies of the Puget Sound Region and Their Food Plants
Washington Butterfly Association [email protected] Pine White ( Neophasia menapia ) w ww.naba.org/chapters/nabaws / Identification : White with black forewing patch, black veins below. Flight Period : late June – early October, peak in August. Common Butterflies of the Puget Sound Region Favorite Nectar Plants : Goldenrod, and Their Food Plants - By David Droppers Pearly Everlasting, Asters, Thistles. Larval Host Plants : Ponderosa Pine, Western Tiger Swallowtail ( Papilio Lodgepole Pine, Douglas-Fir, among other conifers. rutulus ). Identification : Large. Yellow with black tiger stripes. Cabbage White ( Pieris rapae) Underside with some blue. Flight Identification : White, black wing tips and Period : mid April – late September, spots. Males have one spot, females two peak in June. Favorite Nectar Plants : spots. Flight Period : early March – early Mock Orange, Milkweeds, Thistles, November, peaks in May, July and large showy flowers. Larval Host September. Favorite Nectar Plants: Plants : Native Willows, Quaking Many, especially garden flowers, such as Oregano and Lavender. Aspen and other poplars, Red Alder Larval Host Plants : Garden Brassicae, especially broccoli and cabbage. Anise Swallowtail ( Papilio zelicaon) Identification : Large. Mostly black, Cedar Hairstreak ( Mitoura grynea ) centrally yellow, with row of blue dots Identification : Small. Varying brown above, below buff brown on hindwing. Flight Period : late with violet tint, variable white postmedian line, small tails on March – late September, peaks in May, hindwings. Flight Period : late March – early August, peaks in July-August. Favorite Nectar Plants : May-June. Favorite Nectar Plants : Goldenrods, Yarrow, Many flowers, mostly large and showy. Dandelion, Clovers, Red Flowering Currant. Larval Host Plants : Garden Parsley Larval Host Plants : Western Red Cedar, Incense Cedar and Dill, Angelica, Cow Parsnip, many others.