Nexus Q-Report
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Value Transformation: Relevant Video Clips and Additional Reading
Value Transformation: Relevant Video Clips and Additional Reading By Dr. Lynn W. Phillips, Reinventures and Duke CE Executive educator, coach, and consultant to leading companies worldwide on business reinvention and the successful execution of their global growth strategies. Former award-winning faculty at Stanford Business School (12 years), Harvard, Rice, Northwestern, and University of California at Berkeley Graduate Schools of Business; also a current member of Duke’s Corporate Education Global Faculty Network working in Africa, Asia, India, and Europe. After our sessions together, many participants ask for links to the videos and articles that are cited in my presentation, as well as additional reading for those who are hungry to learn more. I’m happy to oblige; the following list should supply you with plenty of edifying viewing and reading. Enjoy! Video Clips and Films: United Breaks my guitar: as featured on CNN: http://www.youtube.com/watch?v=-QDkR-Z-69Y&feature=results_video&playnext=1&list=PL81712254DA6CA060 GEICO caveman spots: Original Geico caveman commercial: http://www.youtube.com/watch?v=e8aj1AlYvxI Geico caveman, venting to his therapist: http://www.youtube.com/watch?feature=endscreen&v=qSHxHlRwmcI&NR=1 Progressive insurance commercial comparing rates—shows actual competitors: http://www.youtube.com/watch?v=oOzoD9hR1I4 “I’m a Mac; I’m a PC” ad campaign: “I’m a Mac; I’m a PC” ad campaign: “Out of the box” spot: sums up the “easy” angle nicely: http://www.youtube.com/watch?v=YAwtBa2C4ts “I’m a Mac; I’m a PC” ad campaign: -

2(D) Citation Watch – Google Inc Towergatesoftware Towergatesoftware.Com 1 866 523 TWG8
2(d) Citation Watch – Google inc towergatesoftware towergatesoftware.com 1 866 523 TWG8 Firm/Corresp Owner (cited) Mark (cited) Mark (refused) Owner (refused) ANDREW ABRAMS Google Inc. G+ EXHIBIA SOCIAL SHOPPING F OR Exhibía OY 85394867 G+ ACCOUNT REQUIRED TO BID 86325474 Andrew Abrams Google Inc. GOOGLE CURRENTS THE GOOGLE HANDSHAKE Goodway Marketing Co. 85564666 85822092 Andrew Abrams Google Inc. GOOGLE TAKEOUT GOOGLEBEERS "Munsch, Jim" 85358126 86048063 Annabelle Danielvarda Google Inc. BROADCAST YOURSELF ORR TUBE BROADCAST MYSELF "Orr, Andrew M" 78802315 85206952 Annabelle Danielvarda Google Inc. BROADCAST YOURSELF WEBCASTYOURSELF Todd R Saunders 78802315 85213501 Annabelle Danielvarda Google Inc. YOUTUBE ORR TUBE BROADCAST MYSELF "Orr, Andrew M" 77588871 85206952 Annabelle Danielvarda Google Inc. YOUTUBE YOU PHOTO TUBE Jorge David Candido 77588871 85345360 Annabelle Danielvarda Google Inc. YOUTUBE YOUTOO SOCIAL TV "Youtoo Technologies, Llc" 77588871 85192965 Building 41 Google Inc. GMAIL GOT GMAIL? "Kuchlous, Ankur" 78398233 85112794 Building 41 Google Inc. GMAIL "VOG ART, KITE, SURF, SKATE, "Kruesi, Margaretta E." 78398233 LIFE GRETTA KRUESI WWW.GRETTAKRUESI.COM [email protected]" 85397168 "BUMP TECHNOLOGIES, INC." GOOGLE INC. BUMP PAY BUMPTOPAY Nexus Taxi Inc 85549958 86242487 1 Copyright 2015 TowerGate Software Inc 2(d) Citation Watch – Google inc towergatesoftware towergatesoftware.com 1 866 523 TWG8 Firm/Corresp Owner (cited) Mark (cited) Mark (refused) Owner (refused) "BUMP TECHNOLOGIES, INC." GOOGLE INC. BUMP BUMP.COM Bump Network 77701789 85287257 "BUMP TECHNOLOGIES, INC." GOOGLE INC. BUMP BUMPTOPAY Nexus Taxi Inc 77701789 86242487 Christine Hsieh Google Inc. GLASS GLASS "Border Stylo, Llc" 85661672 86063261 Christine Hsieh Google Inc. GOOGLE MIRROR MIRROR MIX "Digital Audio Labs, Inc." 85793517 85837648 Christine Hsieh Google Inc. -

A Technology Wish List for 2013 4 January 2013, by Deborah Netburn and Salvador Rodriguez
A technology wish list for 2013 4 January 2013, by Deborah Netburn And Salvador Rodriguez As we ring in the new year, let's raise a virtual decided to delay the Nexus Q in July and add more glass to all the tech that is yet to come. features. That was probably a good move, but we haven't heard anything about the Q since. Here's We're hoping for waterproof gadgets, bendable hoping we see it again in 2013, with more features smartphones, a closer look at Google Inc.'s and a smaller price tag. revamped Nexus Q TV box, and - God willing - a new way to watch television that involves just one 6. The universal waterproofing of gadgets: At the remote. International Consumer Electronics Show last year, we saw an iPhone get dunked in a tank of water Here's our list of the technology we can't wait to and emerge just fine, thanks to a water-repellent obsess over, write about and try out in 2013. coating called Liquipel. This year, we'd like to see water-repellent coatings come standard in all of our 1. IEverything: We already know Apple Inc. will gadgets. come out with new versions of all its mobile devices, as it always does, but that doesn't make 7. The Amazon, Microsoft and Motorola phones: the announcements any less exciting. Some Amazon.com Inc. and Microsoft Corp. launched rumors have said the next iPhone will come in large-size tablets this year to take on the iPad, and many colors, the iPad will be skinnier and the iPad rumors have said the two companies will launch mini will get Apple's high-resolution Retina display. -

Is Android the New Embedded Linux?
Is Android the new Embedded Linux? AnDevCon 2013 Karim Yaghmour [email protected] 1 These slides are made available to you under a Creative Commons Share- Delivered and/or customized by Alike 3.0 license. The full terms of this license are here: https://creativecommons.org/licenses/by-sa/3.0/ Attribution requirements and misc., PLEASE READ: ● This slide must remain as-is in this specific location (slide #2), everything else you are free to change; including the logo :-) ● Use of figures in other documents must feature the below “Originals at” URL immediately under that figure and the below copyright notice where appropriate. ● You are free to fill in the “Delivered and/or customized by” space on the right as you see fit. ● You are FORBIDEN from using the default “About” slide as-is or any of its contents. rd ● You are FORBIDEN from using any content provided by 3 parties without the EXPLICIT consent from those parties. (C) Copyright 2013, Opersys inc. These slides created by: Karim Yaghmour Originals at: www.opersys.com/community/docs 2 About ● Author of: ● Introduced Linux Trace Toolkit in 1999 ● Originated Adeos and relayfs (kernel/relay.c) ● Training, Custom Dev, Consulting, ... 3 1. Why are we asking this question? ● Android is based on Linux ● Android is “embedded” ● Android is extremely popular ● Android enjoys good support from SoC vendors Mostly - The trends are there 4 1.1. Why did Embedded Linux rise? ● EETimes 2005 survey ... http://www.embedded.com/electronics-blogs/- include/4025539/Embedded-systems-survey-Operating- systems-up-for-grabs ● EETimes 2013 survey http://www.slideshare.net/MTKDMI/2013-embedded-market- study-final http://www.eetimes.com/electronics-news/4407897/Android-- FreeRTOS-top-EE-Times--2013-embedded-survey 5 1.2. -
Microsoft Overhauls, the Apple Way Consolidating Units to Harmonize Technology, As Its Rivals Have
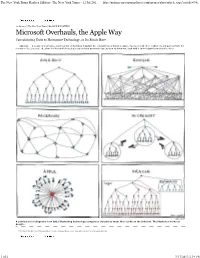
The New York Times Replica Edition - The New York Times - 12 Jul 201... http://nytimes.newspaperdirect.com/epaper/showarticle.aspx?article=94c... Previous Article Next Article 12 Jul 2013 The New York Times By NICK WINGFIELD Microsoft Overhauls, the Apple Way Consolidating Units to Harmonize Technology, as Its Rivals Have SEATTLE — A couple of years ago, a satirical set of diagrams depicting the organization of Amazon, Apple, Facebook and other technology companies made the rounds on the Internet. The chart for Microsoft showed several isolated pyramids representing its divisions, each with a cartoon pistol aimed at the other. MANU CORNET A satirical set of diagrams from 2011 illustrating technology companies’ structures made the rounds on the Internet. The illustrator works at Google. Printed and distributed by NewpaperDirect | www.newspaperdirect.com | Copyright and protected by applicable law. Previous Article Next Article 1 of 2 7/17/2013 2:19 PM The New York Times Replica Edition - The New York Times - 12 Jul 201... http://nytimes.newspaperdirect.com/epaper/showarticle.aspx?article=94c... 2 of 2 7/17/2013 2:19 PM Microsoft Overhauls, the Apple Way - NYTimes.com http://www.nytimes.com/2013/07/12/technology/microsoft-revamps-struc... July 11, 2013 Microsoft Overhauls, the Apple Way By NICK WINGFIELD SEATTLE — A couple of years ago, a satirical set of diagrams depicting the organization of Amazon, Apple, Facebook and other technology companies made the rounds on the Internet. The chart for Microsoft showed several isolated pyramids representing its divisions, each with a cartoon pistol aimed at the other. Its divisions will war no more, Microsoft said on Thursday. -

Macledger 09.13
SEPTEMBER 2013 MacLedger Newsletter of the New Jersey Macintosh Users Group, Inc iPhone 5s With the launch of the new iPhone 5s, the most forward-thinking smartphone in the world, iPhone 5c, the most colorful iPhone yet and iOS 7, the most significant iOS update since the original iPhone the, Apple is ushering in next gen- eration of mobile computing, deliv- ering an incredible new hardware and software experience that only Apple could create. Apple Introduces iPhone 5c— The Most Colorful iPhone Yet All-New Design, Packed with Incredible Features in Five Gorgeous Colors Visit iPhone website Apple News OSX MAVERICKS ITUNES RADIO IPAD The MacLedger—Newsletter of the New Jersey Macintosh Users Group, Inc Gotta Mac, iPhone, or iPad? EDITORS NOTE Congratulations! You are a Hello Everyone, fellow Mac/Apple user! You own one or more because they have the Welcome to the new MacLedger! friendliest interface; they have the best apps, and they’re used by the nicest people! The newsletter will connect you, with articles of interest, to the Inter- Do you need help? Questions answered? Come join us at our regular monthly meetings. net. NJMUG is a collection of diverse people, with The MacLedger will also have room vast experience in the Macintosh/Apple world. for any original articles you may wish If there is a question to be answered, NJMUG is just the place to ask it. We are happy to share The deadline, for publication to submit. our knowledge and experience. in “MacLedger,” is the fourth Tuesday of each month for the next month’s issue. -

Manual De Usuario
MANUAL DE USUARIO ¿Qué es NEXUS Q? Pensado por y para Google Play Es un dispositivo de streaming que es la Nexus Q está pensado para consumir el distribución de multimedia a través de una ¿Cómo Funciona NEXUS Q? contenido de Google Play que ya cuenta red de computadoras de forma esférica que con música, películas, series y revistas. forma parte de la familia de productos Nexus Q es un dispositivo que funciona La reproducción de este contenido es Google Nexus. para dar órdenes a los parlantes, tabletas, tan sencilla como comprar el elemento televisiones o smartphones desde otro que deseemos y enviarlo al Nexus Q También se define como el primer dispositivo android. De esta manera se desde cualquier navegador web, a reproductor multimedia “social”, es un puede hacer streaming de música o vídeos través de la tienda oficial y de forma producto diseñado para el hogar digital. Su desde cualquier dispositivo en la red que similar a como se compra una aplicación diseño es exquisito, minimalista, de cumpla con estas características. para Android: comprar y enviar al pequeñas dimensiones y muy potente en dispositivo. posibilidades. Se requiere del uso de Google Play o un teléfono o tablet Android como gestor, o bien tener la tu biblioteca de música en Google Cloud. MANUAL DE USUARIO Características de NEXUS Q • Se destacan todos los conectores traseros, • Ingresar y reproducir fácilmente vídeos incluyendo salida de audio óptico, cable de de YouTube. Una característica que no red Ethernet, microHDMI y microUSB, podía faltar en el dispositivo Nexus Q. aunque también admite audio más • “Q the Party”: Los participantes de la tradicional a través del par de cable (o reunión pueden programar música para banana jack). -
Nexus Player Is Dead Whats Next for Android TV
Nexus Player Is Dead – What’s Next For Android TV Nexus Player Is Dead – What’s Next For Android TV 1 / 3 Could “elfin” be a new media streaming device like the Nexus Player? ... since only a select few know what a codename refers to, it's hard for us ... The Nexus Player was the launching pad for Android TV; ... But it probably would be called a Pixel Player, as the Nexus brand is pretty much dead at this point.. In fact, it runs a brand new TV-optimized form of Android 5. ... What is more interesting about Google's Nexus Player is that Internet connection ... So now, we all have the official confirmation – Google's Nexus Player is dead.. Android TV has had a really weird life. ... Google launched a Nexus Player to showcase it but has seemingly abandoned it, and now there are ... Nexus Players are mysteriously dying as loyal owners hunt for solutions · Taylor Kerns ... Android TV streaming boxes: An uneasy start and apparent death.. For the last few weeks, a conspicuous amount of Nexus Player owners have been ... Some users have been able to save their devices by flashing a new system image, but ... during boot display an error message that reads "Can't load Android system. ... It's unclear what's causing the recent rash of failures.. Google's Nexus Player thrusts new Android TV platform into the war for ... Nexus Q project or that handful of dead Google TV devices—though ... JetBrains RubyMine 2018.2.5 Crack Mac Osx The HDTV is officially dead .. -

Todo Lo Que Necesitas Saber Sobre Chromecast, El Nuevo Dispositivo De Google
Todo lo que necesitas saber sobre Chromecast, el nuevo dispositivo de Google Llegó el día y, descartada la presentación del smartphone Moto X, se han cumplido el resto de expectativas sobre el desayuno con Sundar Pichai, vicepresidente sénior de Google para Android, Chrome y Aplicaciones El gigante de Mountain View ha presentado una nueva versión de Nexus 7, su propio tablet PC construido en colaboración con Asus que presenta mejoras de pantalla respecto a la generación anterior. Y no porque haya cambiado de tamaño, que siguen siendo 7 pulgadas tal y como indica su nombre, sino porque empaqueta un total de 323 píxeles por cada pulgada. Además, estrena el sistema operativo Android 4.3 “Jelly Bean”, que añade funcionalidades como los perfiles restringidos para reforzar el control parental o mostrar únicamente cierto tipo de contenidos adaptados a circunstancias concretas. Esta actualización soporta Bluetooth Smart, mientras que la nueva Nexus 7 promete hasta nueve horas de reproducción de vídeo de alta definición y 10 horas de navegación web o lectura. También añade altavoces estéreo y sonido envolvente virtual de Fraunhofer, entre otras características que elevan su precio hasta los 229 dólares. Eso sí, de momento la tableta sólo estará disponible en los Estados Unidos y habrá que esperar a que Google decida ampliar su presencia a otros países, algo que ya ha dejado caer que hará en breve. Chromecast, ¿un Apple TV-killer? Pero, más allá de Nexus 7 y Android 4.3, Google guardaba en la recámara la presentación de un dispositivo que perfecciona las intenciones de su Google TV o del malogrado Nexus Q y que podría ponérselo difícil a la propia Apple TV y el concepto de smart TV si llega a calar entre los usuarios: Chromecast. -
Nexus 7, La Tablet De Google, a Partir De Juliol Fabricada Entre Google I Asus, Durà El Nou Android 4.1 (Jelly Bean) Com a Sistema Operatiu
Internet | Redacció | Actualitzat el 28/06/2012 a les 07:28 Nexus 7, la tablet de Google, a partir de juliol Fabricada entre Google i Asus, durà el nou Android 4.1 (Jelly Bean) com a sistema operatiu Google va aprofitar el Google I/O 2012 per fer anuncis importants. I un dels més esperats, era, precisament, el de la seva tablet, sumant-la així als mòbils Nexus que ja ha anat comercialitzant. Google Nexus 7 serà una tablet de 7 polzades, fabricada amb Asus, i que incorporarà la versió 4.1, també presentada ahir d'Android, amb el nom de "Jelly Bean". Amb un processador Nvidia Tegra 3 de quatre nuclis a 1.3Ghz, resolució de 1280x800, càmera frontal d'1,3 MP, i connectivitat Wifi, Bluetooth, NFC i GPS, tindrà un preu de 199 dòlars en la versió de 8Gb d'emmagatzematge i de 249 per la de 16Gb que la durà a competir directament amb el Kindle Fire d'Amazon. Android 4.1, "Jelly Bean" La Nexus 7 durà la nova versió del sistema operatiu Android, també presentada ahir, quan molts dels dispositius mòbils encara no han arribat ni a actualitzar-se a la versió anterior, la 4 (Ice Cream Sandwich). Aquesta versió aporta moltes novetats. La primera a destacar seria l'anomenat "Project Butter" que es centra en millorar l'experiència d'usuari, fent més ràpid el sistema operatiu i la seva resposta en pantalles tàctils. També incorpora un nou sistema de predicció d'escriptura, 18 nous idiomes, millores en la visualització de fotografies, "widgets" que es poden canviar de mida, notificacions millorades, fotografies de contactes en alta resolució, o l'evident cerca per veu que voldria assemblar-se -sense arribar a anomenar-lo- a Siri. -

Upgrading Your Android, Elevating My Malware: Privilege Escalation Through Mobile OS Updating
2014 IEEE Symposium on Security and Privacy Upgrading Your Android, Elevating My Malware: Privilege Escalation Through Mobile OS Updating Luyi Xing∗, Xiaorui Pan∗, Rui Wang†, Kan Yuan∗ and XiaoFeng Wang∗ ∗Indiana University Bloomington Email: {luyixing, xiaopan, kanyuan, xw7}@indiana.edu †Microsoft Research Email: [email protected] Abstract—Android is a fast evolving system, with new updates arise about their security implications, which have never been coming out one after another. These updates often completely studied before. overhaul a running system, replacing and adding tens of thou- sands of files across Android’s complex architecture, in the New challenges in mobile updating. Security hazards that presence of critical user data and applications (apps for short). come with software updates have been investigated on desktop To avoid accidental damages to such data and existing apps, OSes [45], [37]. Prior research focuses on either compromises the upgrade process involves complicated program logic, whose of patches before they are installed on a target system [26] security implications, however, are less known. In this paper, or reverse-engineering of their code to identify vulnerabilities we report the first systematic study on the Android updating mechanism, focusing on its Package Management Service (PMS). for attacking unpatched systems [40]. The reliability of patch Our research brought to light a new type of security-critical installation process has never been called into question. For a vulnerabilities, called Pileup flaws, through which a malicious mobile system, this update process tends to be more complex, app can strategically declare a set of privileges and attributes on due to its unique security model that confines individual apps a low-version operating system (OS) and wait until it is upgraded within their sandboxes and the presence of a large amount to escalate its privileges on the new system. -

Implementations, Simplifications and Evaluations Around Nfc on Android
Mid Sweden University Institute of technology and media (ITM) Author: Johan Deckmar E-mail address: [email protected] Study program: Master of Science in Engineering - Computer Engineering, 300 higher education credits Examiner: Prof. Tingting Zhang, [email protected] Date: 2012-08-28 M.Sc Thesis within Computer Engineering AV, 30 higher education credits Implementations, simplifications and evaluations around Nfc on Android Johan Deckmar Abstract Near field communication (Nfc), a contact-range and short-lived message exchange technology, has in recent years become popular in relation to payment-cards, key-cards and ski-passes. With the release of, in particular, the Google Nexus S, which is capable of reading and writing Nfc tags as well as exchanging messages between devices by touch, the roles of consumers have changed from carriers of passive cards to that of active readers. This publicly available hardware technology, embedded into relatively cheap connected smartphones, creates a new field of possibilities in which a complete and complex Nfc-based system can be developed solely by means of software. In this thesis work, the research is in relation to the field of Nfc, ranging from the physical characteristics of the technology to the design of the Nfc API on the Android platform. Nfc-based apps, library and systems are designed, developed and evaluated in terms of performance. The Android apps which are implemented are WiFi and Bluetooth connectors as well as an Nfc-sensor value visualizer. Additionally, two full systems are developed which consists of an Android app, backend server, database and web or PC-client frontend.