JANITSCH-SENIORTHESIS-2015.Pdf (575.4Kb)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Report Concerning Jeffrey E. Epstein's Connections to Harvard University
REPORT CONCERNING JEFFREY E. EPSTEIN’S CONNECTIONS TO HARVARD UNIVERSITY Diane E. Lopez, Harvard University Vice President and General Counsel Ara B. Gershengorn, Harvard University Attorney Martin F. Murphy, Foley Hoag LLP May 2020 1 INTRODUCTION On September 12, 2019, Harvard President Lawrence S. Bacow issued a message to the Harvard Community concerning Jeffrey E. Epstein’s relationship with Harvard. That message condemned Epstein’s crimes as “utterly abhorrent . repulsive and reprehensible” and expressed “profound[] regret” about “Harvard’s past association with him.” President Bacow’s message announced that he had asked for a review of Epstein’s donations to Harvard. In that communication, President Bacow noted that a preliminary review indicated that Harvard did not accept gifts from Epstein after his 2008 conviction, and this report confirms that as a finding. Lastly, President Bacow also noted Epstein’s appointment as a Visiting Fellow in the Department of Psychology in 2005 and asked that the review address how that appointment had come about. Following up on President Bacow’s announcement, Vice President and General Counsel Diane E. Lopez engaged outside counsel, Martin F. Murphy of Foley Hoag, to work with the Office of General Counsel to conduct the review. Ms. Lopez also issued a message to the community provid- ing two ways for individuals to come forward with information or concerns about Epstein’s ties to Harvard: anonymously through Harvard’s compliance hotline and with attribution to an email ac- count established for that purpose. Since September, we have interviewed more than 40 individu- als, including senior leaders of the University, staff in Harvard’s Office of Alumni Affairs and Development, faculty members, and others. -

Dawkins on Nowak Et Al. and Kin Selection « Why Evolution Is True 25/03/2011 10:17
Big dust-up about kin selection « Why Evolution Is True 25/03/2011 10:19 Why Evolution Is True « Bummer Peregrinations » Book Links « Home Big dust-up about kin selection About the Author Search About the Book Excerpt Find » Last August I wrote about a new paper in Nature by three Harvard Research Interests biologists, Martin Nowak, Corina Tarnita, and Edward O. Wilson. Their Reviews Meta paper was, as I called it, a “misguided attack on kin selection,” referring Register Log in to the form of selection in which the reproductive success of a gene Buy the Book (usually a gene that affects behavior) is influenced not only by its effects Amazon.co.uk Links on its carrier, but also by its effects on related individuals (kin) carrying Amazon.com the same gene. This idea, introduced to evolutionary biology by George All posts Barnes & Noble All comments Price and W. D. Hamilton, has been enormously productive, explaining all Borders sorts of things from parental care and parent-offspring conflict to sex Indie Bound Email Subscription ratios in animals and, perhaps most important, the evolution of “altruism.” Nowak et al.’s paper attacked the idea that this form of Enter your email address to selection—based on a gene’s “inclusive fitness”—was important in subscribe to this blog and explaining anything; indeed, they didn’t even see kin selection as a form receive notifications of new of natural selection. My original post details most of my objections to posts by email. their paper. Now, seven months later, Nature has published a spate of objections to the Nowak et al paper: there are five critiques and a response to them by Nowak et al. -

Martin Nowak Evolutionary Dynamics
808 Book reviews Euler and Gauss. Such illustrations make one wonder what modern science would look like had nothing from these books ever appeared! Practically every article contains information on terminology and notation proposed by Euler. All are in use in modern mathematics. This observation can be extended. It is emphasized that Euler’s courses present the first educational literature in the modern sense of the word. Euler was the first author to discuss proofs and not to hide the motivation behind his demonstrations. Finkel, Boyer and Alexanderson note that Euler not only shares his way of thinking openly but also warns about possible mistakes. Even Euler’s commentaries on his book about artillery were translated from German into English and French. The second volume, The Early Mathematics of Euler, is intended as a mathematical biography. It presents the original and fascinating story of mathematics in the St Petersburg period of Euler’s life, before his departure to Berlin. C. Edward Sandifer attempts to take readers back into the past and is highly successful in achieving this. The time from 1725 to 1741 is divided into the periods 1725–1727, 1728, 1729–1731, and so on. Each section starts with information on world events, events in Euler’s life, the sum of Euler’s work during the period, and Euler’s mathematical papers appearing in the period. The author then gives an account of every article. Such a presentation creates a distinctive narrative atmosphere—an attractive aspect of the work that has significant merit. One can see how early the huge circle of Euler’s interests was formed. -

David G. Rand
DAVID G. RAND Sloan School (E-62) Room 539 100 Main Street, Cambridge MA 02138 [email protected] EDUCATION 2006-2009 Ph.D., Harvard University, Systems Biology 2000-2004 B.A., Cornell University summa cum laude, Computational Biology PROFESSIONAL Massachusetts Institute of Technology 2019- Erwin H. Schell Professorship 2018- Associate Professor (tenured) of Management Science, Sloan School 2018- Secondary appointment, Department of Brain and Cognitive Sciences 2018- Affiliated faculty, Institute for Data, Systems, and Society Yale University 2017-2018 Associate Professor (tenured) – Psychology Department 2016-2017 Associate Professor (untenured) – Psychology Department 2013-2016 Assistant Professor – Psychology Department 2013-2018 Appointment by courtesy, Economics Department 2013-2018 Appointment by courtesy, School of Management 2013-2018 Cognitive Science Program 2013-2018 Institution for Social and Policy Studies 2013-2018 Yale Institute for Network Science Applied Cooperation Team (ACT) 2013- Director Harvard University 2012-2013 Postdoctoral Fellow – Psychology Department 2011 Lecturer – Human Evolutionary Biology Department 2010-2012 FQEB Prize Fellow – Psychology Department 2009-2013 Research Scientist – Program for Evolutionary Dynamics 2009-2011 Fellow – Berkman Center for Internet & Society 2006-2009 Ph.D. Student – Systems Biology 2004-2006 Mathematical Modeler – Gene Network Sciences, Ithaca NY 2003-2004 Undergraduate Research Assistant – Psychology, Cornell University 2002-2004 Undergraduate Research Assistant – Plant Biology, Cornell University SELECTED PUBLICATIONS [*Equal contribution] Mosleh M, Arechar AA, Pennycook G, Rand DG (In press) Cognitive reflection correlates with behavior on Twitter. Nature Communications. Bago B, Rand DG, Pennycook G (2020) Fake news, fast and slow: Deliberation reduces belief in false (but not true) news headlines. Journal of Experimental Psychology:General. doi:10.1037/xge0000729 Dias N, Pennycook G, Rand DG (2020) Emphasizing publishers does not effectively reduce susceptibility to misinformation on social media. -
The Descent of Edward Wilson
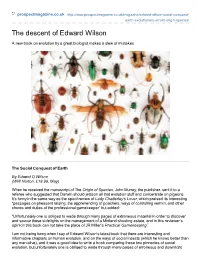
prospectmagazine.co.uk http://www.prospectmagazine.co.uk/magazine/edward-wilson-social-conquest- earth-evolutionary-errors-origin-species/ The descent of Edward Wilson A new book on evolution by a great biologist makes a slew of mistakes The Social Conquest of Earth By Edward O Wilson (WW Norton, £18.99, May) When he received the manuscript of The Origin of Species, John Murray, the publisher, sent it to a referee who suggested that Darwin should jettison all that evolution stuff and concentrate on pigeons. It’s funny in the same way as the spoof review of Lady Chatterley’s Lover, which praised its interesting “passages on pheasant raising, the apprehending of poachers, ways of controlling vermin, and other chores and duties of the professional gamekeeper” but added: “Unfortunately one is obliged to wade through many pages of extraneous material in order to discover and savour these sidelights on the management of a Midland shooting estate, and in this reviewer’s opinion this book can not take the place of JR Miller’s Practical Gamekeeping.” I am not being funny when I say of Edward Wilson’s latest book that there are interesting and informative chapters on human evolution, and on the ways of social insects (which he knows better than any man alive), and it was a good idea to write a book comparing these two pinnacles of social evolution, but unfortunately one is obliged to wade through many pages of erroneous and downright perverse misunderstandings of evolutionary theory. In particular, Wilson now rejects “kin selection” (I shall explain this below) and replaces it with a revival of “group selection”—the poorly defined and incoherent view that evolution is driven by the differential survival of whole groups of organisms. -

Coordination, Indirect Speech, and Self-Conscious Emotions
The Psychology of Common Knowledge: Coordination, Indirect Speech, and Self-Conscious Emotions The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation Thomas, Kyle. 2015. The Psychology of Common Knowledge: Coordination, Indirect Speech, and Self-Conscious Emotions. Doctoral dissertation, Harvard University, Graduate School of Arts & Sciences. Citable link http://nrs.harvard.edu/urn-3:HUL.InstRepos:17467482 Terms of Use This article was downloaded from Harvard University’s DASH repository, and is made available under the terms and conditions applicable to Other Posted Material, as set forth at http:// nrs.harvard.edu/urn-3:HUL.InstRepos:dash.current.terms-of- use#LAA The Psychology of Common Knowledge: Coordination, Indirect Speech, and Self-conscious Emotions A dissertation presented by Kyle Andrew Thomas to The Department of Psychology in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the subject of Psychology Harvard University Cambridge, Massachusetts May 2015 © 2015 Kyle Andrew Thomas All rights reserved. Dissertation Advisor: Professor Steven Pinker Kyle Andrew Thomas The Psychology of Common Knowledge: Coordination, Indirect Speech, and Self-conscious Emotions ABSTRACT The way humans cooperate is unparalleled in the animal kingdom, and coordination plays an important role in human cooperation. Common knowledge—an infinite recursion of shared mental states, such that A knows X, A knows that B knows X, A knows that B knows that A knows X, ad infinitum—is strategically important in facilitating coordination. Common knowledge has also played an important theoretical role in many fields, and has been invoked to explain a staggering diversity of social phenomena. -

2.11 Books MH
Vol 444|2 November 2006 BOOKS & ARTS Beautiful models The dynamics of evolutionary processes creates a remarkable picture of life. Who knows? Who cares? It’s a riot. Evolutionary Dynamics: Exploring the Nowak takes the view that ideas in evo- Equations of Life by Martin Nowak lutionary biology should be formulated Belknap Press: 2006. 384 pp. $35, £22.95, mathematically. An easy retort would be €32.30 the observation that Darwin managed quite well without mathematics. But, in PRESS UNIV. HARVARD Sean Nee fact, Darwin did not realize the enormous Martin Nowak is undeniably a great artist, potential potency of natural selection until working in the medium of mathematical he absorbed Thomas Malthus’ exposition biology. He may be a great scientist as well: of the counterintuitive consequences of time will tell, and readers of this book can exponential growth — a fundamentally form their own preliminary judgement. mathematical insight. Certainly, some ideas In his wanderings through academia’s that are essentially quantitative must be firmament — from Oxford, through Prin- explored mathematically. But there are plenty ceton’s Institute for Advanced Study to his of other interesting theoretical areas. Con- apotheosis as professor of biology and math- sider genomic imprinting, whereby genes ematics at Harvard — Nowak has seemingly in a fetus are expressed differently depend- effortlessly produced a stream of remarkable Weaving a spell: Martin Nowak models cooperators ing on whether they come from the father theoretical explorations into areas as diverse and defectors to create patterns like Persian rugs. or mother. Nowak’s Harvard colleague as the evolution of language, cooperation, can- David Haig has explained this phenomenon cer and the progression from HIV infection to until, in turn, this new ‘strain’ also comes under in terms of evolutionary conflicts between AIDS. -

The Case of Albanisch-Albanesisch and Broader Implications
What’s in A Name? The Case of Albanisch-Albanesisch and Broader Implications Erhard Hinrichs Alex Erdmann Seminar für Sprachwissenschaft Department of Linguistics Eberhard Karls Universität The Ohio State University Tübingen, Germany Columbus, Ohio, USA [email protected] [email protected] Brian Joseph Department of Linguistics The Ohio State University Columbus, Ohio, USA [email protected] Abstract This paper offers a use case of the CLARIN research infrastructure (Hinrichs and Krauwer, 2014) from the fields of historical linguistics and the history of linguistics. Using large electronically available corpora of historical English and German, it investigates differences in terminology used in the two languages when referring to the people and the language of Albania. The search and data exploration tools that are available for the DTA and the DWDS corpora as part of the CLARIN-D infrastructure (Hinrichs and Trippel, in press) make it possible to determine semantic change for the terminology under consideration. The paper concludes with a discussion of broader implication of the present use case for the use of historical corpora and the functionality of query tools needed for digital humanities research. 1 Introduction The name for the country that lies on the western coast of the central part of the Balkan peninsula in south- eastern Europe, as well as for its people and its language, presents interesting variation in both German and, to a far lesser extent, English, raising questions about the nature and the chronology of the variation. The country in question is, in its usual form today in English, Albania, the people Albanians, and the language Albanian, and on the German side, the most usual terms nowadays are Albanien, Albaner, and Albanisch. -

A Dissertation Entitled Mathematical Models of the Activated Immune
A Dissertation entitled Mathematical Models of the Activated Immune System during HIV Infection by Megan Powell Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Doctor of Philosophy Degree in Mathematics Dr. H. Westcott Vayo, Committee Chair Dr. Joana Chakraborty, Committee Member Dr. Marianty Ionel, Committee Member Dr. Denis White, Committee Member Dr. Patricia R. Komuniecki, Dean College of Graduate Studies The University of Toledo May 2011 Copyright 2011, Megan Powell This document is copyrighted material. Under copyright law, no parts of this document may be reproduced without the expressed permission of the author. An Abstract of Mathematical Models of the Activated Immune System during HIV Infection by Megan Powell Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Doctor of Philosophy Degree in Mathematics The University of Toledo May 2011 HIV is a virus currently affecting approximately 33.3 million people worldwide. Since its discovery in the early 1980s, researchers have strived to find treatment that helps the immune system eradicate the virus from the human body. A great deal of advances have been made in helping HIV infected individuals from advancing to AIDS, but no cure has yet been found. Researchers have found that the immune system is in a chronic state of activation during HIV infection and believe this could be a major contributor to the decline of immune system cell populations. Using analysis of systems of Ordinary Differential Equations, this paper serves to better understand the dynamics of the activated immune system during HIV infection. Both current and possible future therapies are considered. -

Lost in Transcription: Important Harvard Scientists Attack Kin Selection: Context 04/04/2011 10:14
Lost in Transcription: Important Harvard Scientists Attack Kin Selection: Context 04/04/2011 10:14 Share Report Abuse Next Blog» Create Blog Sign In Lost in Transcription Science, Poetry, and Current Events, where "Current" and "Events" are broadly construed. Home F. A. Q. Primers on Imprinting Features Webcomic Friday, April 1, 2011 New and Selected Posts Dunning-Kruger Effect Important Harvard Scientists Attack Kin Selection: Context It's like naming your yacht "The Titanic" So, a couple of days ago, I made a video dramatizing the scientific kerfuffle surrounding a paper Ann Coulter, Radiation, and published in Nature by Martin Nowak, Carina Tarnita, and E. O. Wilson of Harvard. My original Hormesis goal had been to create something that would be entertaining to the people involved in the Re: Homophobia and argument. Evolutionary Psychology Genetical Book Review: White The original post, which contains the video, is here. Cat by Holly Black Over the past day or so, it has become clear that a lot of people are seeing the video who are About the Blauthor maybe not familiar with the context in which the kerfuffle arose. If you're one of those people, Jon Wilkins here's an attempt to provide a little background. Jon is a Professor at the Santa Fe Nowak and Wilson, two of the authors of the article, are two of the most prolific and high-profile Institute, where evolutionary biologists working today. If you're in the field, you probably own at least one of he studies Wilson's books. Tarnita is a postdoc working with Nowak who already has an impressive set of theoretical evolutionary biology. -

Infection Dynamics of COVID-19 Virus Under Lockdown and Reopening
Infection dynamics of COVID-19 virus under lockdown and reopening Jakub Svobodaa, Josef Tkadlecb, Andreas Pavlogiannisc, Krishnendu Chatterjeea, and Martin A. Nowakb,? aIST Austria, A-3400 Klosterneuburg, Austria bDepartment of Mathematics, Department of Organismic and Evolutionary Biology, Harvard University, Cambridge, MA 02138, USA cDepartment of Computer Science, Aarhus University, Aabogade 34, 8200 Aarhus, Denmark ?To whom correspondence should be addressed. E-mail: martin [email protected] Abstract Motivated by COVID-19, we develop and analyze a simple stochastic model for a disease spread in human population. We track how the number of infected and critically ill people develops over time in order to estimate the demand that is imposed on the hospital system. To keep this demand under control, we consider a class of simple policies for slowing down and reopening the society and we compare their efficiency in mitigating the spread of the virus from several different points of view. We find that in order to avoid overwhelming of the hospital system, a policy must impose a harsh lockdown or it must react swiftly (or both). While reacting swiftly is universally beneficial, being harsh pays off only when the country is patient about reopening and when the neighboring countries coordinate their mitigation efforts. Our work highlights the importance of acting decisively when closing down and the importance of patience and coordination between neighboring countries when reopening. 1 Introduction Severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2) is the virus that causes the current pandemic of coronavirus disease 2019 (COVID-19). The infection was first identified in December 2019 in Wuhan (China) and has since spread globally. -

On December 2, 2011 Downloaded
ESSAY GE PRIZE ESSAY Exploring how the genome folds by using Zoom! three-dimensional genome sequencing. Erez Lieberman Aiden rowing up, I watched lowed by restriction, proximity Next, I collaborated with Nynke van Ber- the 1968 film Pow- ligation, and the use of univer- kum, a postdoc in Job Dekker’s lab, to refi ne Gers of Ten. The camera sal polymerase chain reaction this strategy and bring it to life (17). In Hi-C, begins with a couple on a picnic (PCR) primers to amplify junc- cells are cross-linked; DNA is restricted, and then zooms out: to the pic- tions containing a target frag- leaving overhangs; overhangs are fi lled in, nic ground (101 meters), Chi- ment (13). Chromosome con- incorporating a biotinylated nucleotide; and cago (105 m), Earth (107 m), formation capture (3C) replaced the blunt ends are ligated in dilute condi- GE Healthcare and Science and, eventually, the universe spermine and spermidine with tions (Fig A). Because the site of ligation is 26 are pleased to present the (10 m), only to zoom back in prize-winning essay by Erez formaldehyde, enabling dilution marked with biotin, ligation junctions—evi- until it reaches the interior of a Lieberman Aiden, a regional prior to ligation and markedly dence of physical contact between two loci— proton (10 to 16 m). Breathtak- winner from North America, improving signal (14). Coupling can be purifi ed and sequenced. The result- ing structures emerge at each who is the Grand Prize win- microarray and sequencing tech- ing maps reveal features at three scales: the scale.