16.410/16.413 Recitation 5 Solutions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1936 Chevrolet Cars Described
1936 CHEVROLET CARS DESCRIBED GENERAL: The doors were now hinged toward the rear: no more "suicide" style front doors. Steel disc wheels were used this year A 14- gallon fuel tank was now used on all Chevrolets. In mid-year, steel spoke wheels were adopted for all models. CHEVROLET — STANDARD — SERIES FC — SIX: The Standard series Chevrolets adopted the all-steel Fisher Body with "Turret Top" styling. They had more rounded front fenders and radiator grilles and shells. A split front windshield (as was used on 1935 Master DeLuxes) was new. The number of horizontal hood louvers was reduced to two. with the top ones being longer. Rear fenders were skirted and more streamlined. Standard Models did not use the “Knee Action” independent front suspension. MASTER DELUXE - SERIES FD/FA - SIX: A thicker. rounder radiator shell characterized cars in the Master DeLuxe line. The grille was also larger and more rounded at the top. more pointed at the bottom. A lower hood ornament had its wings pointing back horizontally. The FD designation was for cars without coil spring front suspension; the FA designation was for cars with this feature. There were still no open cars in the Master DeLuxe series. Note: Master DeLuxe Models with "Knee Action" were designated FA models. They cost $20 more and weighed 30 pounds more. Production of FD and FA models was lumped together as a single total. Innovations: Hydraulic brakes introduced for Chevrolets. The Cabriolet was reintroduced in Standard (FC) series. Box-girder frame on Standard models. Early Standard Series had composite wood/steel doors. -

APS57TM Remote Start / Keyless System
VehicleAPS57TM Remote Start / Keyless System Installation and Reference Guide Thank you for trusting Prestige products! If you are a consumer, please note: Professional installation is strongly recommended. This manual assumes the installer has adequate knowledge of the following expertise. Therefore, it does not cover these topics in detail: • 12-volt electronics • Testing and verifying circuits • Making safe and lasting wiring connections • Factory ignition, power, lighting, data bus and sensing systems • Factory systems and components to avoid • Safe wire routing, circuit protection and product placement • Access to vehicle-specific technical information In addition, this manual assumes the installer has theproper tools, skill and facilities to perform a professional installation. Performing an improper installation could result in damage to the vehicle or its components, improper system function, unsafe vehicle operation or physical injury.Such instances would not be covered by the vehicle manufacturer's warranty, nor by Voxx Electronics, Inc. Detailed Descriptions Quick Reference 2 Wire Harness Colors and Functions 15 System Programming 2 Power Connector 15 Programming Mode Entry / Exit 3 Notification Connector 16 Feature Bank Options 4 Input / Output Connector 17 Data Port Protocol 17 Tach Function 6 External Components 17 Alarm Override 6 RF Antenna Kit 18 Silent Lock and Unlock 6 Data Bus Interface (DBI) 18 User Selectable LED 6 Telematics 6 Weblink Programming 18 System Diagnostics 18 Troubleshooting Remote Start 7 Setup Options 7 Remote Programming 19 Wiring Diagrams 8 Keyless Control 19 Door Lock Connections 10 Remote Start Control 22 Full System Connections 14 System Operation 14 Remote Operation 2020 Voxx Electronics Corporation. All rights reserved. -
Instructions Warning Procedures
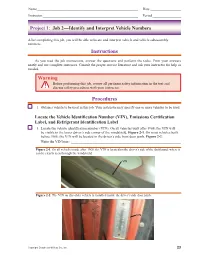
Name ________________________________________________________ Date _________________ Instructor _____________________________________________________ Period ________________ Project 1: Job 2—Identify and Interpret Vehicle Numbers After completing this job, you will be able to locate and interpret vehicle and vehicle subassembly numbers. Instructions As you read the job instructions, answer the questions and perform the tasks. Print your answers neatly and use complete sentences. Consult the proper service literature and ask your instructor for help as needed. Warning Before performing this job, review all pertinent safety information in the text and discuss safety procedures with your instructor. Procedures 1. Obtain a vehicle to be used in this job. Your instructor may specify one or more vehicles to be used. Locate the Vehicle Identifi cation Number (VIN), Emissions Certifi cation Label, and Refrigerant Identifi cation Label 1. Locate the vehicle identifi cation number (VIN). On all vehicles built after 1968, the VIN will be visible in the lower driver’s side corner of the windshield, Figure 2-1. On most vehicles built before 1968, the VIN will be located in the driver’s side front door jamb, Figure 2-2. Write the VIN here: _____________________________________________________________ Figure 2-1. On all vehicles made after 1968, the VIN is located on the driver’s side of the dashboard, where it can be clearly seen through the windshield. VIN Figure 2-2. The VIN on this older vehicle is installed inside the driver’s side door jamb. VIN Copyright Goodheart-Willcox Co., Inc. 23 Proj01 Jobs01-05.indd 23 7/7/2014 11:09:40 AM Project 1: Job 2—Identify and Interpret Vehicle Numbers (continued) 2. -
Update of Vehicle Classification for County Road Pavement Design
Update of Vehicle Classification for County Road Pavement Design W. James Wilde, Principal Investigator Center for Transportation Research and Implementation Minnesota State University, Mankato April 2010 Research Project Final Report #2010-17 Technical Report Documentation Page 1. Report No. 2. 3. Recipients Accession No. MN/RC 2010-17 4. Title and Subtitle 5. Report Date Update of Vehicle Classification for County Road Pavement April 2010 Design 6. 7. Author(s) 8. Performing Organization Report No. W. James Wilde and Timothy J. Stahl 9. Performing Organization Name and Address 10. Project/Task/Work Unit No. Center for Transportation Research and Implementation INV 844 Minnesota State University, Mankato 11. Contract (C) or Grant (G) No. 205 Trafton Science Center E. (c) 89219 Mankato, MN 56001 Jackson County Highway Department 53053 780th Street Jackson, MN 56143 12. Sponsoring Organization Name and Address 13. Type of Report and Period Covered Minnesota Department of Transportation Final Report Research Services Section 14. Sponsoring Agency Code 395 John Ireland Boulevard, MS330 St. Paul, MN 55155-1899 15. Supplementary Notes http://www.lrrb.org/pdf/201017.pdf 16. Abstract (Limit: 250 words) This report describes the work conducted across the State of Minnesota to determine if an update to the distribution of the classification of vehicles on the County State Aid Highway (CSAH) system is needed. The data were collected across the state, representing many regions, and in all seasons (although very few counts were conducted during winter). The results of this investigation include the development of updated vehicle classification tables for pavement design on the CSAH system, a manual for counties to use when conducting individual vehicle classification counts for pavement design, and a new view of the distribution of vehicle types on the CSAH system, which has not been systematically counted for many years. -

Big Boy Promotions Demolition Derby Rules WINDSHIELD CLASS
Big Boy Promotions Demolition Derby Rules WE RESERVE THE RIGHT TO REFUSE ANY ENTRY OF DRIVERS, PIT CREW MEMBERS, OR SALES OF PIT PASSES TO INDIVIDUALS WHO WE FEEL WILL BE DISORDERLY, HAS HAD A BAD PAST RECORD OR IN THE BEST INTEREST OF SAFETY THAT THE INDIVIDUAL SHOULD NOT BE IN THE ARENA OR PIT AREA. *DRIVER'S ENTRY* E-1. Each driver is required to fill out an entry blank. Only one entry per driver, per class. Entries are not transferable. E-2. Derby officials may accept or reject any entry, driver or pit crew member. E-3. Those issued pit passes may be refused entry by derby officials should officials deem it necessary for safety or the smooth operation of the derby. E-4. Pit passes will not be issued to those 14 years of age or younger at some shows. Check minor regulations for each specific location. Anyone under 18 years of age must be accompanied by an adult and have an adult/guardian waiver signed. E-5. Everyone in the pits must sign a waiver. E-6. Any driver 18 or younger must have a notarized minor's release signed by the parent or guardian. The minimum age for drivers is 16 unless prohibited by the individual derby host (fair board etc.) regulations. Entrant will be responsible for securing approval from said host. E-7. Intoxicating beverages, illegal substances or the use of such are prohibited prior to or during the event. Any violator will be disqualified. This includes car, driver and crew. E-8. -

Third Row Seat Installation
SB-13-13-001 R6 June 4, 2016 Tesla Motors, Inc. Service Bulletin Third Row Seat Installation Classification Parts and Section/Group 13 - Seats Country/Region North America, Accessories Europe, Japan Bulletin Year All Model Model S Version All Bulletin Classification: This bulletin provides instructions and guidelines for a vehicle procedure that is not the result of a defect. This bulletin might not be VIN-specific. These instructions assume knowledge of motor vehicle and high voltage electrical component repairs, and should only be executed by trained professionals. Tesla Motors assumes no liability for injury or property damage due to a failure to properly follow these instructions or repairs attempted by unqualified individuals. This Service Bulletin supersedes SB-13-13-001 R5, dated 16-Feb-16. Each content change is marked by a vertical line in the left margin. Discard the previous version and replace it with this one. This Service Bulletin contains installation instructions for the optional third row seat. Included in this procedure are steps to add the rear crossmember (if needed), remove and modify existing trim panels, install hardware, add the 2nd row seatback bezel, and adjust the latch assembly. NOTE: This procedure can be performed on any vehicle that is eligible for a third row seat based on the information in the “Third Row Seat Eligibility”, “Rear Bumper Plate Inspection”, and “Affected VIN(s)” sections of this document. As with other Service Bulletins, this procedure may be performed by professional 3rd-party repairers. Consequently, there are and can be no restrictions on sales of third row seats to professional 3rd-party repairers. -
2007 Pontiac G5 Get to Know Guide
G5 2007 A 4/19/06 10:36 AM Page 1 DRIVER INFORMATION Multiple-Disc CD Player . .13 Instrument Panel . .2 Audio Steering Wheel Controls . .14 Instrument Panel Cluster . .3 CONVENIENCE Vehicle Symbols . .4 Remote Vehicle Start . .14 Driver Information Center . .4 Exterior Lamps . .15 SAFETY & SECURITY Interior Lamps . .16 Remote Keyless Entry . .6 Cruise Control . .16 Automatic Door Locks . .7 Accessory Power Outlets . .16 Theft-Deterrent System . .7 Retained Accessory Power . .16 OnStar® . .7 Cupholders . .17 Passenger Air Bag Status Indicator . .7 Interior Storage Features . .17 Child Restraints (LATCH) . .7 Split-Folding Rear Seatbacks . .17 Emergency Trunk Release . .8 Sunroof . .17 COMFORT Parking Brake . .17 Seat Adjustments . .8 PERFORMANCE & MAINTENANCE Tilt Steering Wheel . .8 Electric Power Steering . .18 Adjustable Front Head Restraints . .9 Traction Control . .18 Heated Seats . .9 Parking Your Vehicle . .18 Climate Controls . .9 Battery Location . .19 Preventing Window Fogging . .10 Tire Pressure . .19 Cabin Air Filter . .10 Securing the Fuel Cap . .19 ENTERTAINMENT Resetting the Oil Life System . .19 Audio System Features . .10 OWNER INFORMATION XM Satellite Radio . .13 Roadside Assistance . .20 My GMLink . .20 Congratulations on your purchase of a Pontiac G5. Please read this information and your Owner Manual to ensure an outstanding ownership experience. Note that your vehicle may not include all the features described in this booklet. Keep this booklet with your Owner Manual for easy reference. G5 2007A4/19/0610:36AMPage2 DRIVER INFORMATION 2 Instrument Panel Your Getting toKnow G5 A. Side Window Outlets H. Windshield Wiper/Washer Controls N. Horn B. Air Outlets I. Audio System O. Cigarette Lighter/Accessory C. -
Fourth Amendment Rights and Non-Consensual Vehicle Identification Number Inspections Occurring During Rt Affic Opsst
Case Western Reserve Law Review Volume 37 Issue 2 Article 6 1986 Fourth Amendment Rights and Non-Consensual Vehicle Identification Number Inspections Occurring during rT affic opsSt James K. Roosa Follow this and additional works at: https://scholarlycommons.law.case.edu/caselrev Part of the Law Commons Recommended Citation James K. Roosa, Fourth Amendment Rights and Non-Consensual Vehicle Identification Number Inspections Occurring during Traffic opsSt , 37 Case W. Rsrv. L. Rev. 339 (1986) Available at: https://scholarlycommons.law.case.edu/caselrev/vol37/iss2/6 This Note is brought to you for free and open access by the Student Journals at Case Western Reserve University School of Law Scholarly Commons. It has been accepted for inclusion in Case Western Reserve Law Review by an authorized administrator of Case Western Reserve University School of Law Scholarly Commons. Notes FOURTH AMENDMENT RIGHTS AND NON- CONSENSUAL VEHICLE IDENTIFICATION NUMBER INSPECTIONS OCCURRING DURING TRAFFIC STOPS The Supreme Court recently held that a police officer may enter a motor vehicle to ascertain its vehicle identification number during an ordinary traffic stop for no rea- son other than the observed traffic violation. This Note examines New York v. Class within the context of a trend toward erosion offourth amendment rights. The author asserts that Class was inconsistent with precedent, and proposes a state statute that would guarantee the protectionsheld inapplicable under the federal Constitution. INTRODUCTION IN THE PAST, the Supreme Court has analyzed the permissible scope of police intrusions involving automobiles in certain con- texts,' but not specifically within the context of vehicle identifica- tion number (VIN) inspections occurring during stops for traffic infractions. -

2020 GMC Yukon Owners Manual
20_GMC_Yukon_YukonXL_YukonDenali_COV_en_US_84367243B_2019AUG05.ai 1 8/2/2019 11:48:38 AM C M Y CM MY CY CMY K 84367243 B GMC Yukon/Yukon XL/Denali Owner Manual (GMNA-Localizing-U.S./ Canada/Mexico-13566587) - 2020 - CRC - 4/15/19 Contents Introduction . 2 Keys, Doors, and Windows . 9 Seats and Restraints . 46 Storage . 109 Instruments and Controls . 114 Lighting . 164 Infotainment System . 174 Climate Controls . 175 Driving and Operating . 183 Vehicle Care . 281 Service and Maintenance . 377 Technical Data . 392 Customer Information . 396 Reporting Safety Defects . 406 OnStar . 410 Connected Services . 418 Index . 421 GMC Yukon/Yukon XL/Denali Owner Manual (GMNA-Localizing-U.S./ Canada/Mexico-13566587) - 2020 - CRC - 8/2/19 2 Introduction Introduction This manual describes features that Canadian Vehicle Owners may or may not be on the vehicle because of optional equipment that A French language manual can be was not purchased on the vehicle, obtained from your dealer, at model variants, country www.helminc.com, or from: specifications, features/applications Propriétaires Canadiens that may not be available in your region, or changes subsequent to On peut obtenir un exemplaire de the printing of this owner’s manual. ce guide en français auprès du The names, logos, emblems, concessionnaire ou à l'adresse Refer to the purchase suivante: slogans, vehicle model names, and documentation relating to your vehicle body designs appearing in specific vehicle to confirm the Helm, Incorporated this manual including, but not limited features. Attention: Customer Service to, GM, the GM logo, GMC, the 47911 Halyard Drive GMC Truck Emblem, YUKON, and Keep this manual in the vehicle for Plymouth, MI 48170 DENALI are trademarks and/or quick reference. -

Renault ESPACE MY2017 Dimensions
Renault ESPACE MY2017 Dimensions BOOT VOLUME VDA volume all seats advanced 5 pl / 7 pl folded (dm3) 785/719 VDA volume all seats advanced 5 pl / 7 pl folded (litres) 888/812 VDA volume all seats backed away 5 pl / 7 pl folded (dm3) 680/614 VDA Volume 7 places, 3rd row opened (dm3) 247 Maximum volume, rear seats folded (to roof) 5 places / 7 places (dm3) 2,101/2,035 DIMENSIONS A Wheelbase (unladen) 2,884 B Overall length 4,857 C Front overhang 1,034 D Rear overhang 939 E Front track ground, rims 18’’ 1,630 F Rear track ground, rims 18’’ 1,621 G Overall width / with rearview mirrors / with rearview mirrors folded 1,888 / 2,128 / 1,914 H Height (unladen) 1,677 H1 Open tailgate height (unladen) 2,106 J Trunk sill height (unladen) 710 K Ground clearance 160 nd L Knee radius in 2 row 308 M Front elbow room 1,549 M1 Rear elbow room 1,543 N Front shoulder width 1,494 N1 Rear shoulder width 1,480 P Headroom at 14° from 1st row (front seats) 906 st P1 Headroom at 14° from 1 row (rear seats) 874 Y - Upper trunk entrance width 870 - Maximum trunk width 1,160 Y1 Lower trunk entrance width 1,140 Y2 Interior width between wheel arches 1,090 Z Trunk entrance height 800 Z1 Maximum load length (from trunk door to folded rear seats) 2,020 Z2 Load length behind rear seats 1,075 Z3 Load length to dashboard (passenger seat folded flat) 460 Renault ESPACE MY2017 Technical specifications PETROL DIESEL Version Energy TCe 225 EDC Energy dCi 160 EDC Energy dCi 130 Transmission type EDC7 EDC6 MT6 Emissions control standard Euro 6b Euro 6b Number of seats 5 and 7 -

(Washington, DC). 1937-05-16
AUTOMOBILES FOR SALE. _AUTOMOBILES FOR SALE._ AUTOMOBILES FOR SALE. AUTOMOBILES FOR SALE. ___ <Continued.)_ PONTIAC 193d master Silver Streak 4- TERRAPLANE 1936 coach. $495: low PONTIAC 8 1935 de luxe 4-door touring door touring sedan with built-in trunk: mileage, carefully driven, beautiful brown sedcin. trunk etc.: driven only this car has had best of care 15.000 the and finish, motor and rubber like new; any SELLINfiT miles: $450. Dealer. Columbia 3186-M._, shows it: low mileage; a real buy for $875; demonstration: easy terms. ... also Century Mo- CHERNER WASHINGTON’S 1933 de luxe coach. $286; terms. tors, • Thm Mott LARGEST FORD PONTIAC late 1935 de luxe convertible, 2022 14th st., Potomac 2409. LEE ) DEALER! Barnes D. 1 rumble-seat coupe; A-l shape; $395. Col. Motors. 1729 14th st. n.w._ BUTLER, Inc. TERRAPLANE 1936 coach. What a car 7105-VV._ ROCKNE 85 4-door in sedan, excellent this is for the Clean upholstery, FORDS PONTIAC 1933 sedan. Here’s real trans- condition: 30-day guarantee; low price. mileage; mechanically perfect. See this car by all portation at low cost: motor, tires, paint paint like new and new tires; $256; pri- means before y0u buy anything. Gold OK See It today. Only $299. L. P. vately owned. seen Can be at 4822 Chevy seal guaranteed and personally Steuart, Inc.. 1325 14th st. Chase Blvd., or call Met. 9410 for in- indorsed. n.w._ Fleming Motor Corp.. Champlain 8 sedan: formation. V95; PONTIAC 1933 excellent finish, _ Kalorama rd., Va block east of 2155 spotless mohair upholstery: quiet, power- 18th st. -

Chevrolet Malibu Owner Manual (GMNA-Localizing-U.S./Canada/Mexico- 13555849) - 2020 - CRC - 8/16/19
20_CHEV_Malibu_COV_en_US_84313268C_2020JAN22.ai 1 1/21/2020 7:49:20 AM C M Y CM MY CY CMY K Chevrolet Malibu Owner Manual (GMNA-Localizing-U.S./Canada/Mexico- 13555849) - 2020 - CRC - 8/16/19 Contents Introduction . 2 Keys, Doors, and Windows . 7 Seats and Restraints . 32 Storage . 85 Instruments and Controls . 88 Lighting . 125 Infotainment System . 133 Climate Controls . 134 Driving and Operating . 143 Vehicle Care . 211 Service and Maintenance . 302 Technical Data . 316 Customer Information . 319 Reporting Safety Defects . 330 OnStar . 335 Connected Services . 343 Index . 346 Chevrolet Malibu Owner Manual (GMNA-Localizing-U.S./Canada/Mexico- 13555849) - 2020 - CRC - 1/17/20 2 Introduction Introduction This manual describes features that Helm, Incorporated may or may not be on the vehicle Attention: Customer Service because of optional equipment that 47911 Halyard Drive was not purchased on the vehicle, Plymouth, MI 48170 model variants, country USA specifications, features/applications that may not be available in your Using this Manual region, or changes subsequent to To quickly locate information about the printing of this owner’s manual. the vehicle, use the Index in the The names, logos, emblems, Refer to the purchase back of the manual. It is an slogans, vehicle model names, and documentation relating to your alphabetical list of what is in the vehicle body designs appearing in specific vehicle to confirm the manual and the page number where this manual including, but not limited features. it can be found. to, GM, the GM logo, CHEVROLET, the CHEVROLET Emblem, Keep this manual in the vehicle for MALIBU, and the MALIBU Emblem quick reference.