Tunnel Detection
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The New Hampshire High Tunnel Story
The New Hampshire High Tunnel Story NATURAL RESOURCES CONSERVATION SERVICE New Hampshire January 2011 BACKGROUND National High Tunnel Conservation Benefits Local Foods Initiatives 3-Year Pilot Program High tunnels can provide a number of Growing food locally, especially before significant conservation benefits such as and after the traditional growing season, NRCS offered seasonal high tunnels an increase in plant and soil quality, a helps strengthen the local economy and (officially called “seasonal high tunnel decrease in pesticide use and foliar (leaf) helps ensure the viability and profitability system for crops”) as a conservation disease, and improved energy savings. of small farms. When NH farms succeed, practice for the first time in fiscal year Many farmers who want to grow toma- valuable farmland and cultural heritage are (FY) 2010 as part of a three-year trial to toes without using pesticides often find protected. High tunnels are important tools determine their effectiveness in con- they can only do so successfully if they for enhancing the availability of local food serving water, improving soil health, are grown in a tunnel. Without rainfall, year-round. foliar disease is often reduced because the leaves stay dry. Insects that are com- “As expected, the seasonal high monly a problem in the field may not be “It is phenomenal that winter tunnel pilot has been popular in so in the tunnel because the tunnel tends farmer’s markets in NH have grown New Hampshire. In just one to disrupt their feeding patterns. Other from none four years ago to twenty year, the NRCS-NH helped fund insects that occur in a high tunnel are today. -

FACT SHEET: BART Silicon Valley
Twin-Bore Single-Bore Running Tunnel Running Tunnel Utilities Utilities Up to ~60' FACT SHEET: VTA’s BART Silicon Valley Phase II Extension Project FACTTunneling MethodologySHEET: BART Silicon Valley VTA’sVTA’s BART BART Silicon Silicon Valley Phase Valley II Project Phase is a six-mile, ll Extension four-stationUp extensionProject to ~75' that will bring BART train service from Berryessa/North San José through downtown San José to the City of Santa Clara. The Phase II Project will include an approximately five-mile tunnel, two mid-tunnel ventilation facilities, a maintenance facility and storage yard, three VTA’sunderground BART Siliconstations (AlumValley Rock/28th Program Street, Overview Downtown San José, Diridon), and one ground-level station (Santa VTAClara). is extending The subway the tunnelBART regionalwill be in heavy one large rail system diameter to Milpitas,tunnel. San Jose, and Santa Clara. The 16-mile extension, called the BART Silicon Valley Program, will extend the BART system south of BART’s future Warm Springs/SouthSingle-Bore Fremont Tunnel Station in Fremont to Milpitas, San Jose, and Santa Clara. When completed, this fully grade-separatedThe tunnel will be project constructed is planned as a tosingle, include large six diameter stations andtunnel. a new The maintenance and storage facility in Santa Clara.approximately VTA’s BART 45 footSilicon tunnel Valley will Program contain istwo being independent delivered trackways,in two phases. one Thefor Berryessa Extension Project (Phaseeach direction I) is under of constructiontravel. Passenger and scheduled platforms willto open be located in 2018, within with thestations tunnel, in Milpitas and the Berryessa areaconnected of San toJose. -

Geotechnical Performance of a Tunnel in Soft Ground
Missouri University of Science and Technology Scholars' Mine International Conference on Case Histories in (1993) - Third International Conference on Case Geotechnical Engineering Histories in Geotechnical Engineering 03 Jun 1993, 10:30 am - 12:30 pm Geotechnical Performance of a Tunnel in Soft Ground A. B. Parreira Universidade de São Paulo, Brazil R. F. Azevedo Pontifícia Universidade Católica do Rio de Janeiro, Brazil Follow this and additional works at: https://scholarsmine.mst.edu/icchge Part of the Geotechnical Engineering Commons Recommended Citation Parreira, A. B. and Azevedo, R. F., "Geotechnical Performance of a Tunnel in Soft Ground" (1993). International Conference on Case Histories in Geotechnical Engineering. 17. https://scholarsmine.mst.edu/icchge/3icchge/3icchge-session05/17 This work is licensed under a Creative Commons Attribution-Noncommercial-No Derivative Works 4.0 License. This Article - Conference proceedings is brought to you for free and open access by Scholars' Mine. It has been accepted for inclusion in International Conference on Case Histories in Geotechnical Engineering by an authorized administrator of Scholars' Mine. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected]. !111!!111 Proceedings: Third International Conference on Case Histories in Geotechnical Engineering, St. Louis, Missouri, ~ June 1-4, 1993, Paper No. 5.55 Geotechnical Performance of a Tunnel in Soft Ground A. B. Parreira R.F.Azevedo Assistant Professor, Universidade de Sio Paulo, Brazil Associate Professor, Pontificia Universidade Cat61ica do Rio de Janeiro, Brazil SYNOPSIS The analysis of a tunnel section excavated through soft ground is presented. -
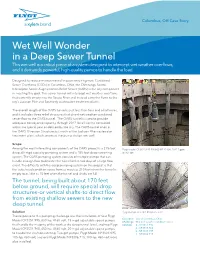
Wet Well Wonder in a Deep Sewer Tunnel
Columbus, OH Case Story Wet Well Wonder in a Deep Sewer Tunnel This wet well is a critical piece of a system designed to intercept wet weather overflows, and it demands powerful, high-quality pumps to handle the load. Designed to reduce environmental impacts resulting from Combined Sewer Overflows (CSOs) in Columbus, Ohio, the Olentangy-Scioto- Interceptor-Sewer Augmentation Relief Sewer (OARS) is the key component in meeting this goal. This sewer tunnel will intercept wet weather overflows that currently empty into the Scioto River and instead carry the flows to the city’s Jackson Pike and Southerly wastewater treatment plants. The overall length of the OARS tunnel is just less than four and a half miles, and it includes three relief structures that divert wet weather combined sewer flow to the OARS tunnel. The OARS tunnel is sized to provide adequate conveyance capacity through 2047 for all storms contained within the typical year as defined by the city. The OARS tunnel ends at the OARS Diversion Structure just north of the Jackson Pike wastewater treatment plant, which serves as the pump station wet well. Scope Among the most interesting components of the OARS project is a 215-foot Flygt model CP3351/995 FM 800 HP 4160V, 10417 gpm deep, 60-mgd capacity pumping system and a 185-foot deep screening at192’ tdh system. The OARS pumping system consists of multiple pumps that can handle enough flow to dewater the tunnel within two days of a large flow event. The difficulty with the deep pumping system on this project is that the static head condition varies from as much as 210 feet when the tunnel is empty to as little as 15 feet when the tunnel and shafts are full. -

Planting in a High Tunnel Department of Natural Resources Conservation Service Agriculture
United States Planting in a High Tunnel Department of Natural Resources Conservation Service Agriculture What is a Seasonal High Tunnel System? Alaska Crops A high tunnel (Seasonal Tunnel System for Crops) is a In Alaska four crops immediately come to mind as polyethylene (plastic) covered structure that allows benefitting from extended seasons, warmer growers to increase production of certain crops, grow temperatures and high market return. These are some crops that could not otherwise be grown in their tomatoes, cucumbers, corn, and peppers. They are area, and extend the length of time in the year (growing currently the most popular, as well as profitable, crops season) that the crops may be grown. for high tunnel production. Of course, this does not rule out other plants, nor does it rule out starting earlier in High tunnels often look similar to greenhouses, but are the season with cooler tolerant plants (i.e. quick maturing usually only single walled and are typically not baby greens), harvesting them and planting a second temperature controlled. The plastic covering traps crop that matures later in the season. High tunnel sunlight to raise temperatures inside the structure for the efficiency is increased by getting two or more crops a plants growing inside. The growing season can be growing season. This strategy also works if you have extended by up to four weeks by protecting crops from some plants that are incompatible because one plant potentially damaging weather conditions. Crops grown shades another. You can however, overcome shading by inside high tunnels tend to be of higher quality and spacing and/or by where you physically locate plants produce higher yields. -

Stability Charts for a Tall Tunnel in Undrained Clay
Int. J. of GEOMATE, April, 2016, Vol. 10, No. 2 (Sl. No. 20), pp. 1764-1769 Geotech., Const. Mat. and Env., ISSN: 2186-2982(P), 2186-2990(O), Japan STABILITY CHARTS FOR A TALL TUNNEL IN UNDRAINED CLAY Jim Shiau1, Mathew Sams1 and Jing Chen1 1School of Civil Engineering and Surveying, University of Southern Queensland, Australia ABSTRACT The stability of a plane strain tall rectangular tunnel in undrained clay is investigated in this paper using shear strength reduction technique. The finite difference program FLAC is used to determine the factor of safety for unsupported tall rectangular tunnels. Numerical results are compared with upper and lower bound limit solutions, and the comparison finds a very good agreement with solutions to be within 5% difference. Design charts for tall rectangular tunnels are then presented for a wide range of practical scenarios using dimensionless ratios ~ a similar approach to Taylor’s slope stability chart. A number of typical examples are presented to illustrate the potential usefulness for practicing engineers. Keywords: Stability Analysis, Tall Tunnel, Undrained Clay, Factor of Safety, FLAC, Strength Reduction Method INTRODUCTION C/D and the strength ratio Su/γD. This approach is very similar to the widely used Taylor’s design chart The critical geotechnical aspects for tunnel design for slope stability analysis (Taylor, 1937) [9]. discussed by Peck (1969) in [1] are: stability during construction, ground movements, and the determination of structural forces for the lining design. The focus of this paper is on the design consideration of tunnel stability that was expressed by a stability number initially defined by Broms and Bennermark (1967) [2] in equation 1: = (1) − + Fig. -

The Port Miami Tunnel
INFRASTRUCTURE CASE STUDY: Port Miami Tunnel SUMMARY PROJECT TYPE YEAR Tunnel 2014 DEAL STRUCTURE Design-build-finance-operate-maintain agreement TOTAL COST $1.4 billion in payments to concessionaire over life of project FINANCING Senior bank debt, TIFIA loan, and private equity FUNDING Availability and milestone payments from the Florida Department of Transportation (supported by a mix of state and local funds) and development funds PUBLIC BENEFIT Route traffic out of downtown streets and improve air quality in downtown Background The Port Miami Tunnel project was built through a public-private partnership (P3) that includes the design, building, financing, operation, and maintenance (DBFOM) of the project.1 The Florida Department of Transportation (FDOT) is the owner and worked with Miami Access Tunnel (MAT) Concessionaire, the private consortium partner led by Meridiam Infrastructure. FDOT named MAT the best value proposer in 2007, and the partners closed the deal in October 2009. Construction began in May 2010. Tunnel mining began in November 2011. The project was opened to the public in August 2014.2 Project Description The idea for the tunnel first surfaced in 1982 when a task force determined that such a structure should be built between the Port ofMiami and I-395 via the McArthur Causeway in order to reroute port-bound traffic off of downtown streets. By 1984, a plan for the tunnel had been developed. This plan was shelved for a number of reasons, but largely due to the building of a cheaper, six-lane bridge between downtown and the port in the early 1990s. There was also a declining number of trips to the port that made the tunnel less important.3 However, truck traffic remained routed through the central business district, and the plan for a tunnel remained a leading solution. -

International Society for Soil Mechanics and Geotechnical Engineering
INTERNATIONAL SOCIETY FOR SOIL MECHANICS AND GEOTECHNICAL ENGINEERING This paper was downloaded from the Online Library of the International Society for Soil Mechanics and Geotechnical Engineering (ISSMGE). The library is available here: https://www.issmge.org/publications/online-library This is an open-access database that archives thousands of papers published under the Auspices of the ISSMGE and maintained by the Innovation and Development Committee of ISSMGE. Geotechnical engineering considerations for the analytical design of an adequate tunnel support system Joan Ongodia, Denis Kalumba, Civil Engineering, University of Cape Town, Graduate student & Senior Lecturer, South Africa, [email protected] Harrison Mutikanga, Brajesh Ojha Civil Engineer, Uganda Electricity Generation Company Limited, Uganda & Civil Engineer, Navayuga Engineering Company, India ABSTRACT: Tunnel excavation impacts the ground both at the surface and underneath thereby affecting the natural in-situ stability. Failure results from stress redistribution, stress relaxation and deformations around the tunnel. Ultimately, tunnel failure occurs when the loads exceed the value of the bearing resistance. Therefore, a support system comprising unique structural components is needed to resist the weight of unstable rock wedges thereby ensuring that the tunnel does not fail. Nevertheless, stability depends on an effective rock- support interaction, specifically with the rock bolt which is the main support member. In order to assess and improve stability conventional methods to design are borrowed from geology which assesses material properties by visual observation, physical identification, using rudimentary geological handy tools, charts and graphs to estimate tunnel support ranges. For stability, the specific value of the required capacity to prevent failure should be established. -

Specifications for the National Tunnel Inventory (SNTI)
Specifications for the National Tunnel Inventory July 2015 Publication No. FHWA-HIF-15-006 FOREWORD This document was developed in coordination with the National Tunnel Inspection Standards (NTIS) regulation 23 CFR 650 Subpart E and the Tunnel Operations, Maintenance, Inspection and Evaluation (TOMIE) Manual. It is intended to supplement the NTIS and provide the specifications for coding data required to be submitted to the National Tunnel Inventory (NTI). Data in the NTI will be used to meet legislative reporting requirements and provide tunnel owners, the Federal Highway Administration (FHWA) and the general public with information on the number and condition of the Nation’s tunnels. I would like to acknowledge the initial work done on tunnel inspection through a joint project between the FHWA and the Federal Transit Authority which developed the Highway and Rail Transit Tunnel Inspection Manual in 2003, and the subsequent update in 2005. This document laid the foundation for highway tunnel inspection using a general condition rating methodology. In this coding document, we move from general condition ratings to element condition states to be consistent with the inspection methodology used for National Highway System (NHS) bridges. By moving to element condition states, tunnel owners should be able to more easily integrate tunnel inventory data into an asset management program and determine the need for maintenance and/or repair of their highway tunnels. Finally, I would like to acknowledge some of those who were involved in the development of this specification; AASHTO Technical Committee T-20 on Tunnels and the FHWA Review Team. Joseph L Hartmann, Ph.D., P.E. -

Stability Analysis of Tunnel-Slope Coupling Based on Genetic Algorithm
JOURNAL OF Engineering Science estr Journal of Engineering Science and Technology Review 8 (3) (2015) 65-70 and Technology Review J Research Article www.jestr.org Stability Analysis of Tunnel-Slope Coupling Based on Genetic Algorithm Tao Luo 1, Shuren Wang 1*, Xiliang Liu 1, Zhengsheng Zou 1 and Chen Cao 2 1 Opening Project of Key Laboratory of Deep Mine Construction, Henan Polytechnic University, Jiaozuo 454003, China 2 School of Civil, Mining and Environmental Engineering, University of Wollongong, Wollongong 2522, Australia Received 1 April 2015; Accepted 15 July 2015 ___________________________________________________________________________________________ Abstract Subjects in tunnels, being constrained by terrain and routes, entrances and exits to tunnels, usually stay in the terrain with slopes. Thus, it is necessary to carry out stability analysis by treating the tunnel slope as an entity. In this study, based on the Janbu slices method, a model for the calculation of the stability of the original slope-tunnel-bank slope is established. The genetic algorithm is used to implement calculation variables, safety coefficient expression and fitness function design. The stability of the original slope-tunnel-bank slope under different conditions is calculated, after utilizing the secondary development function of the mathematical tool MATLAB for programming. We found that the bearing capacity of the original slopes is reduced as the tunnels are excavated and the safety coefficient is gradually decreased as loads of the embankment construction increased. After the embankment was constructed, the safety coefficient was 1.38, which is larger than the 1.3 value specified by China’s standards. Thus, the original slope-tunnel-bank slope would remain in a stable state. -

Fonsi-Ea-2121-Reclamation-Of-Burro
U.S. DEPARTMENT OF ENERGY FINDING OF NO SIGNIFICANT IMPACT FOR THE FINAL ENVIRONMENTAL ASSESSMENT FOR RECLAMATION OF THE BURRO MINES COMPLEX IN SAN MIGUEL COUNTY, COLORADO (DOE/EA-2121) U.S. Department of Energy, Office of Legacy Management ACTION: Finding of No Significant Impact SUMMARY: The U.S. Department of Energy’s (DOE) Office of Legacy Management (LM) has prepared the Final Environmental Assessment for Reclamation of the Burro Mines Complex in San Miguel County, Colorado (DOE/EA-2121), which analyzed the potential environmental impacts of the Proposed Action. The Proposed Action involves the reclamation of three “legacy” mine sites associated with the Burro Mines Complex near Slick Rock, Colorado including erosion control and relocation of waste rock to a nearby former gravel pit. The Bureau of Land Management (BLM) and the Colorado Division of Reclamation, Mining and Safety (DRMS) consider these three mine sites as legacy or pre-law (pre-permitting by the Colorado DRMS). As such, there were no requirements for reclamation and these mines could remain in their current condition. However, DOE is undertaking the Proposed Action to protect the nearby Dolores River, to the extent feasible, from further sediment load originating from legacy waste rock at the Burro Mines Complex. DOE evaluated two alternatives: Alternative 1 (No Action Alternative) as required by DOE’s National Environmental Policy Act (NEPA) regulations (10 CFR Part 1021) and in accordance with Council on Environmental Quality (CEQ) regulations (40 CFR 1502.14[d]); and Alternative 2 (reclamation of the Burro Mines Complex) as the Preferred Alternative that would meet the purpose and need for the Proposed Action and would also be protective of human health and the environment. -

Tunnel Excavator
TUNNEL EXCAVATOR • For heading in soft ground • Excavation boom with swivel dipper stick TE 210 TE • Optimal cross section approx. 25-60 m² • Diesel drive 165 kW • Operating weight 28 t Tunnel excavator TE 210 Technical data / Area of application The new Schaeff TE 210 Tunnel Excavator follows in the successful Operating data footsteps of its predecessor model, the robust TE 200, and is the result of Maximal vertical reach 8’500 mm steadily upgrading its tunnelling equipment. Many years of experience Maximal digging depth 3’900 mm gained in successful applications all over the world and the particularly Minimal operating height 4’700 mm high demands from underground and tunnel construction have gone Minimal overhead clearance 3’300 mm into the TE 210. A service-friendly design fitting job-site requirements Machine width lower carriage 2’500 mm was a prime consideration throughout the development process. Machine width upper carriage 2’700 mm Machine height over cab 3’100 mm Featuring a compact and robust design, the TE 210 is predestined for Machine height for transport 3’300 mm use in small and medium-sized tunnel cross sections. The compact Rear swing radius 2’250 mm superstructure with its short tail swing radius allows for a large Minimal swing radius 3’670 mm superstructure swing range in wide as well as narrow tunnels. The Operating weight, acc. to equipment 82 t kinematics of the work equipment in combination with its high breakout forces permits advance in low-profile tunnels higher than approx. 4,700 mm, while operating heights of up to approx.